






考虑横摆稳定性的车辆路径跟踪控制
~ 采用模型预测控制计算车辆主动转向角
~ 采用滑膜控制计算车辆附加横摆力矩
~ 基于轮胎附着利用率最小化的优化目标函数分配附加力矩
~ 通过仿真验证设计算法的有效性
***附带详细的参考文档
ID:54100714224545131
额尔古纳水清甜
标题:基于模型预测控制的考虑横摆稳定性的车辆路径跟踪控制
摘要:本文提出了一种基于模型预测控制的车辆路径跟踪控制方法,该方法考虑了车辆的横摆稳定性。首先,通过模型预测控制计算车辆的主动转向角,以实现车辆的路径跟踪。其次,采用滑膜控制计算车辆的附加横摆力矩,进一步提高车辆的横向稳定性。然后,基于轮胎附着利用率最小化的优化目标函数,对附加力矩进行分配,以实现最优的车辆控制效果。最后,通过仿真验证了设计算法的有效性。
一、引言
在交通运输领域,车辆的路径跟踪控制一直是一个重要的研究方向。传统的车辆路径跟踪控制方法仅考虑车辆的位置和方向,忽视了车辆的横摆稳定性。然而,在高速行驶或复杂路况下,车辆的横摆稳定性对于安全驾驶和舒适性至关重要。因此,本文提出了一种基于模型预测控制的考虑横摆稳定性的车辆路径跟踪控制方法,旨在提高车辆的行驶稳定性和控制效果。
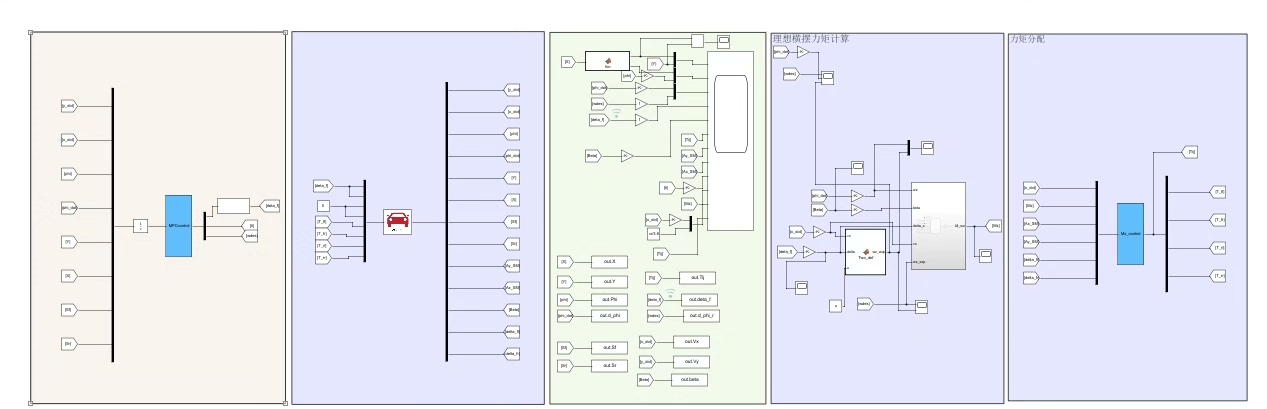
二、车辆路径跟踪控制方法
2.1 模型预测控制计算车辆主动转向角
在车辆路径跟踪控制中,主动转向角是实现车辆转向控制的重要参数。本文采用模型预测控制方法计算车辆的主动转向角。模型预测控制基于车辆动力学模型,通过预测车辆的未来运动状态,计算出最优的转向角,以实现车辆的路径跟踪。
2.2 滑膜控制计算车辆附加横摆力矩
为了提高车辆的横向稳定性,本文采用滑膜控制方法计算车辆的附加横摆力矩。滑膜控制基于车辆的侧向动力学模型,通过控制车辆的侧向滑移率,实现对车辆横向稳定性的改善。
2.3 基于轮胎附着利用率最小化的优化目标函数分配附加力矩
为了实现最优的车辆控制效果,本文提出了基于轮胎附着利用率最小化的优化目标函数。通过对附加力矩进行合理分配,使得轮胎附着利用率最小化,从而实现更好的车辆操控性能和行驶稳定性。
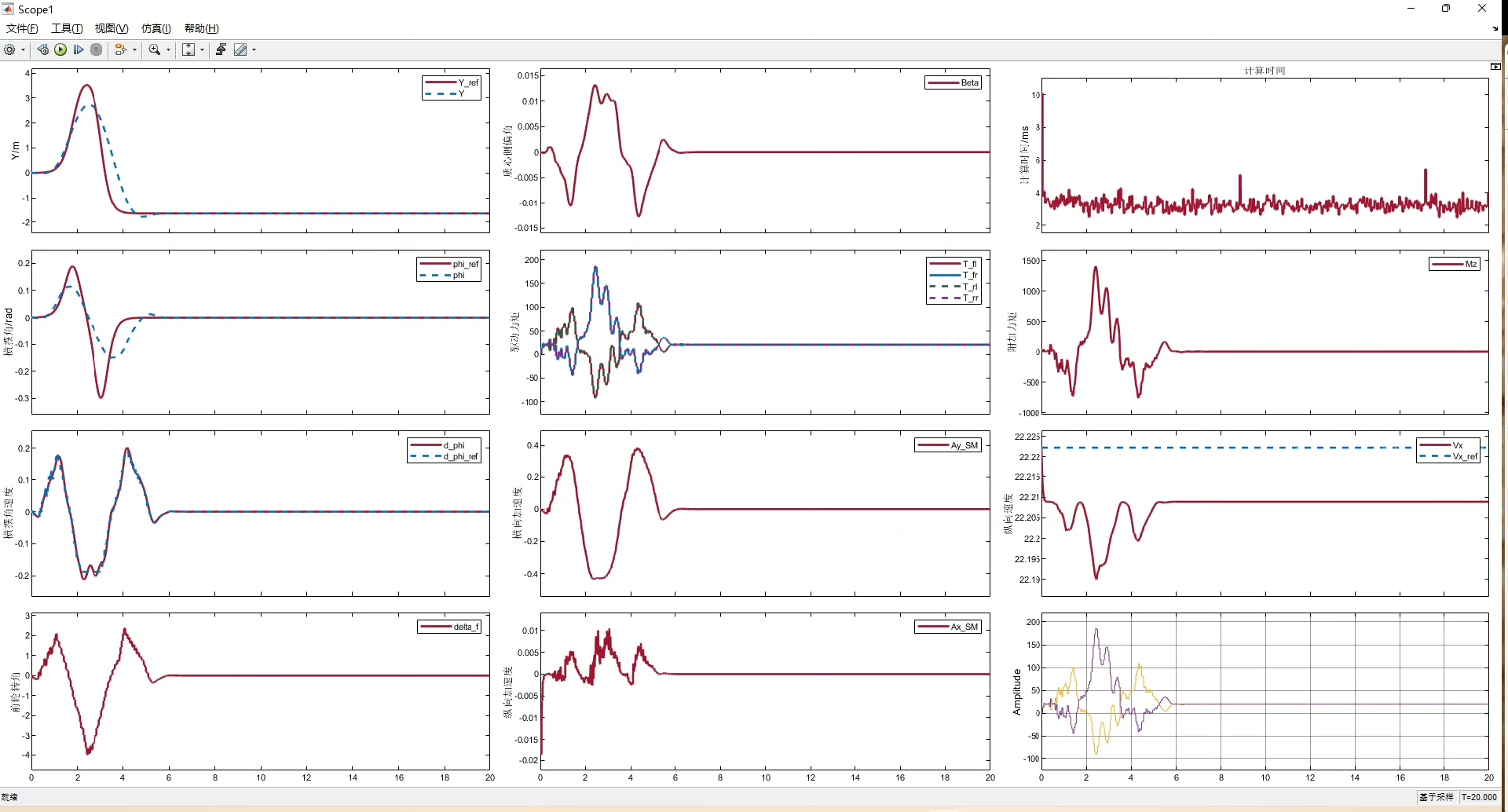
三、仿真验证与实验结果分析
为了验证设计算法的有效性,本文进行了仿真实验。在仿真环境中,分别设置不同的路况和行驶速度,并比较了采用本文提出的方法和传统方法的车辆路径跟踪控制效果。实验结果表明,采用本文方法的车辆具有更好的行驶稳定性和控制效果,能够更准确地跟踪设定的路径。
四、结论
本文基于模型预测控制和滑膜控制,提出了一种考虑横摆稳定性的车辆路径跟踪控制方法。通过计算车辆的主动转向角和附加横摆力矩,并通过优化目标函数对附加力矩进行分配,实现了更好的车辆操控性能和行驶稳定性。仿真实验验证了设计算法的有效性。未来,可以进一步研究该方法在实际驾驶场景中的应用。
关键词:车辆路径跟踪控制;横摆稳定性;模型预测控制;滑膜控制;轮胎附着利用率最小化
【相关代码,程序地址】:http://fansik.cn/714224545131.html
















 527
527

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









