






汇川PLC编写,设备状态机的实现以及实际案例使用,针对设备的多种状态进行区分,有单独状态和叠加态的实现方式

汇川PLC编写,设备状态机的实现以及实际案例使用,针对设备的多种状态进行区分,有单独状态和叠加态的实现方式
随着工业自动化的发展,PLC(可编程逻辑控制器)在工业生产中得到了广泛的应用。其中,汇川PLC作为一种功能强大的PLC设备,具有可编程性、稳定性和可靠性等特点,被广泛应用于各个行业领域。本文将围绕汇川PLC编程的一个重要主题展开讨论,即设备状态机的实现以及实际案例使用。
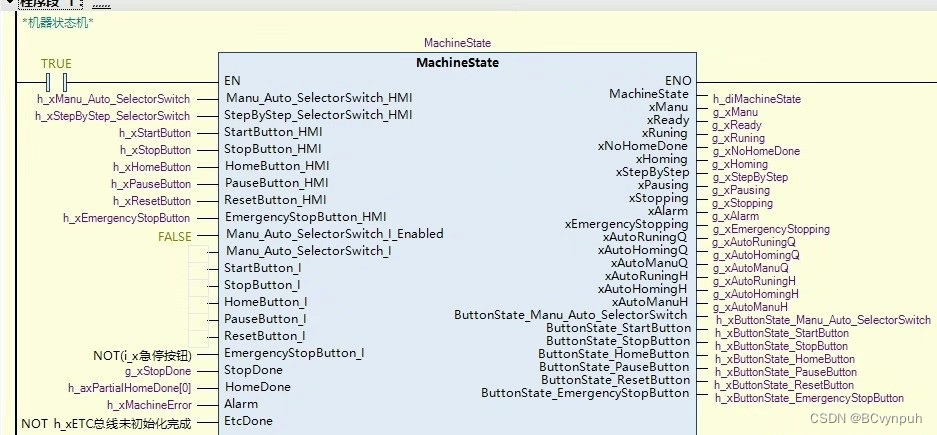
设备状态机作为一种常见的编程模型,用于描述设备在不同状态下的行为和转换关系。在汇川PLC编程中,通过状态机的设计和实现,能够有效管理设备的状态,并实现相应的逻辑控制。在实际应用中,设备常常具有多种状态,例如待机、运行、故障等,为了对这些状态进行区分和管理,我们可以使用单独状态和叠加态的实现方式。
在单独状态的实现方式中,每个设备状态被定义为一个独立的状态变量,通过判断状态变量的值来确定设备的当前状态。这种方式简单直观,易于理解和维护。例如,我们可以使用一个整型变量表示设备的状态,不同的整数值表示不同的状态,如0表示待机状态,1表示运行状态,2表示故障状态等。通过对状态变量进行赋值和判断,即可实现对设备状态的控制和管理。
叠加态的实现方式则更加灵活,可以同时判断多个状态的组合情况。在这种方式下,每个设备状态仍然可以使用一个独立的状态变量表示,但是这些状态变量可以同时存在,通过对多个状态变量进行组合判断,来确定设备的当前状态。例如,我们可以使用多个布尔型变量表示不同的设备状态,通过逻辑运算来判断它们的组合情况。例如,如果布尔变量A表示设备故障,布尔变量B表示设备运行,那么当A为真且B为假时,即可表示设备处于故障状态。
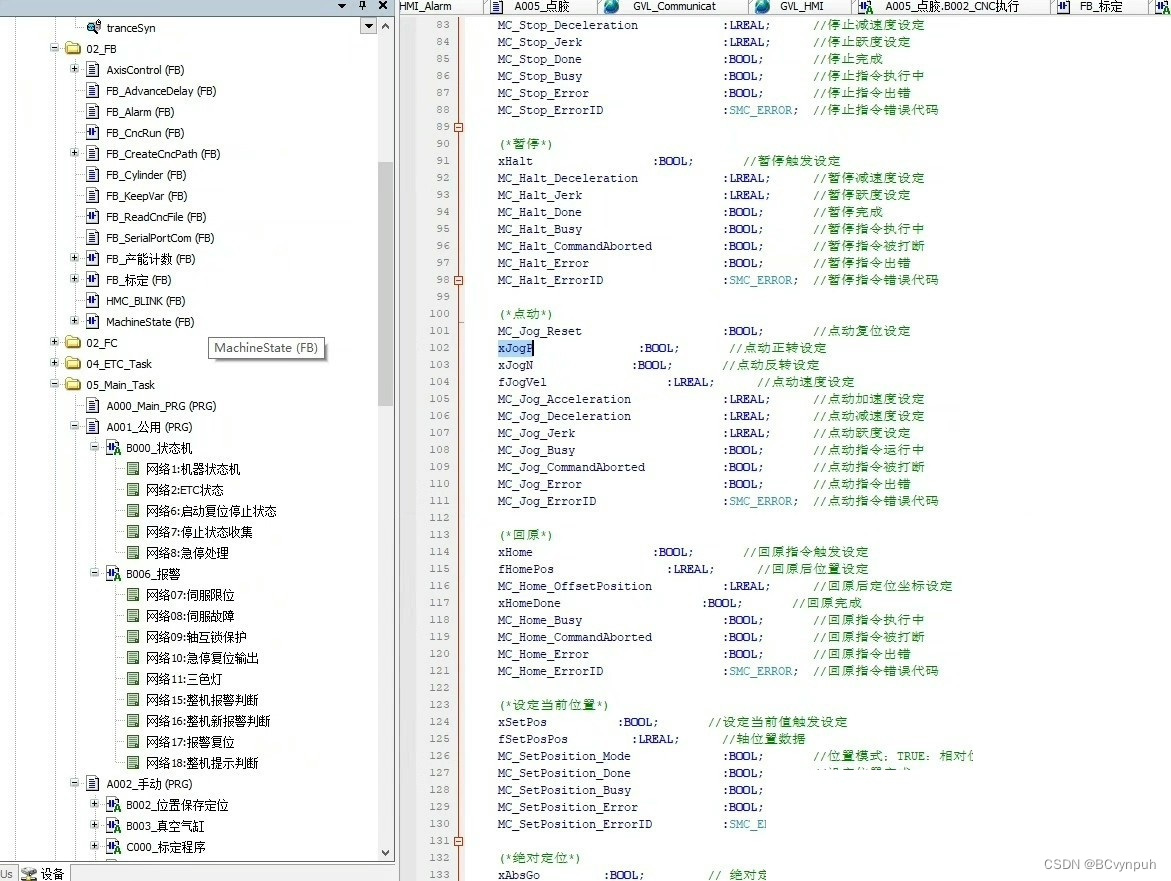
通过以上的状态机实现方式,我们能够对汇川PLC编程中设备的状态进行有效管理。在实际案例中,我们可以根据具体的设备功能和需求,进行对应的状态机设计和实现。例如,对于一台自动化生产线上的机器人,我们可以定义多种状态,如待机、抓取、放置等,通过状态机的实现,能够控制机器人在不同状态下的行为和动作。
综上所述,汇川PLC编写设备状态机的实现以及实际案例使用,对于工业自动化领域具有重要的意义。通过合理的状态机设计和实现,能够提高设备的控制精度和可靠性,实现更加高效的自动化生产。希望本文对读者在汇川PLC编程中设备状态机的理解和应用有所帮助,同时也希望读者能够在实际项目中灵活运用状态机的思想,实现更加智能化的工业控制。
相关代码,程序地址:http://imgcs.cn/lanzoun/761103669478.html















 4742
4742











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









