







 HandsFreeRobot是国内由西工大HandsFree团队开源的机器人软硬件系统,旨在加速机器人研究与开发。该平台参考ROS框架,提供机器人导航、SLAM及计算机视觉等模块,支持多种机器人形态实现。配套硬件包括HandsFreeMini、Stone和Giraffe机器人平台。
HandsFreeRobot是国内由西工大HandsFree团队开源的机器人软硬件系统,旨在加速机器人研究与开发。该平台参考ROS框架,提供机器人导航、SLAM及计算机视觉等模块,支持多种机器人形态实现。配套硬件包括HandsFreeMini、Stone和Giraffe机器人平台。
发现了一个叫HandsFree Robot的国内机器人开源平台
文章目录
最近在看ros平台,跟着兴趣的同时上网也会关注相关的信息,查到了一个国内的开源平台——HandsFree Robot,这个平台是由西工大HandsFree团队进行开源的,根据看到的一篇日记类似的文章,该开源平台参考ros package 和 node的思想搭建的,所以花了些时间去了解这个项目,下边做简单介绍和记录。
HandsFree Robot
相关主页
简单介绍
HandsFree 是一个面向机器人研究、开发的开源软硬件系统。她有完备与科学的框架,以优秀的嵌入式系统框架为核心,精良的电路、机械设计为支撑,帮您快速实现多种形态的机器人。本系统包含机器人导航,SLAM,计算机视觉等模块,并拥有自己上层软件和调试系统。她支持国外其他的开源项目,如 ROS, MPRT, PIXHAWK 等,这一切都为您带来了无比的便捷和快乐!
配套的硬件平台
机器人相关平台包括下边3个;还有一个无人机测绘平台,看说明是支持调用DJI和PixHawk接口实现的的一些测绘功能,暂不讨论。
HandsFree Mini 机器人平台

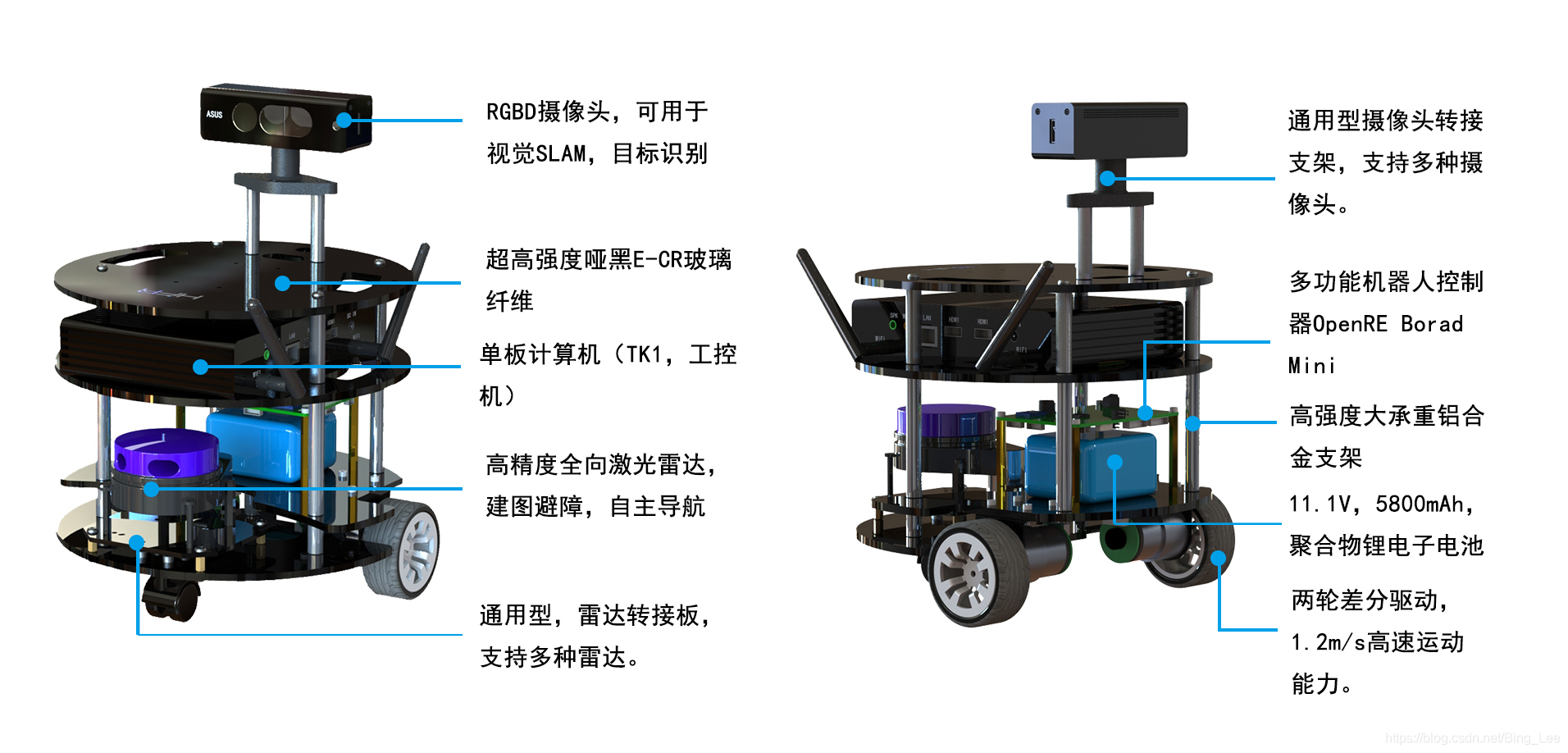
HandsFree Stone 机器人平台


HandsFree Giraffe 机器人平台


软件平台
对这一块来说更感兴趣些,下边这张图是官方嵌入式软件系统的总体框架。1

下边也是来自官方的README文档。2
we recommend that you test code on the x86 pc before transplant to TK1 or TX1/2
- Make sure you install ROS and carefully read the Beginner Level Tutorials
- Follow HandsFree Tutorials to install some dependent packages
- Compilation : catkin_make
run example
roslaunch handsfree_hw handsfree_hw.launch
roslaunch handsfree_hw keyboard_teleop.launchthen you can remote control robot.
这里有提到请确保安装了ros,并且完成了初级指引的学习,等过两天看看代码具体是什么情况,是基于ros平台开发一套配合硬件的软件平台,还是开发一个类似ros的平台。


















 1109
1109

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











