





翻译自https://www.alanzucconi.com/2020/09/14/inverse-kinematics-in-3d/
参考阅读 2D场景中的逆运动学
逆运动学 inverse kinematics
正向运动学:根据角A和角B,计算执行器末端的位置
逆运动学/反向运动学:根据执行器末端的位置,推算出角A和角B
介绍
事实是,逆运动学是一个不仅在电子游戏中反复出现的问题,而且在工程和科学领域都是如此。从机械臂的设计到对人脑运动控制的理解,各种形式的逆运动学起着重要作用。
简介
2D场景中的逆运动学。
如下图所示,是一个约束在二维平面中的双关节臂。两个关节点分别由角度A和B控制。通过调节这两个角度,称为末端执行器( end effector)的机械臂尖端将到达不同的位置。机械臂尖端(the tip of the robotic arm)是角度A控制的关节点
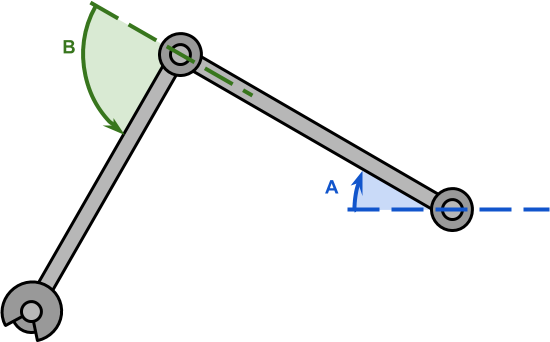
逆运动学的问题是找到角度A和B,以便末端执行器到达所需的目标点。下面的动画显示了一个机械臂正在XY平面上画圆。
我们可以将机械臂想象成一个三角形(下图),有两个内角
α
\alpha
α和
β
\beta
β。
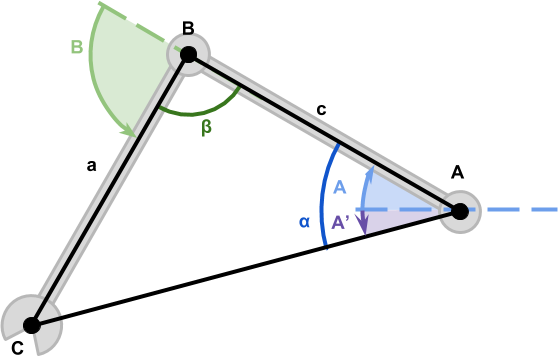
根据三角余弦定理,可得

那么

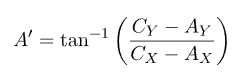
根据反正切函数求得

延伸到三维空间
首先,我们需要了解,2D中有两个关节手臂的场景是一个具有两个自由度(2 degrees of freedom, 2DOF)的问题。与人们想象的可能不同,这表达的不是机械臂有两段;而是我们可以控制两个变量(在这种情况下,是关节的角度,角A和角B)。
当我们把这个问题扩展到三维空间时,我们的机械臂仍然有两个段和两个关节。然而,如果我们假设手臂也可以绕第一个关节自由旋转,那么问题现在有三个自由度(3DOF)。
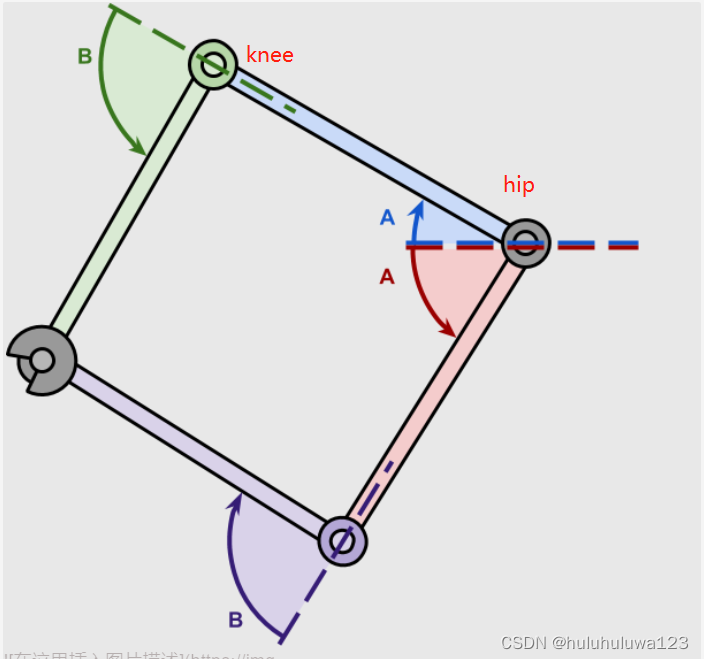
在这种新情况下,第二个接头(B)保持不变。然而,我们假设第一个(A)现在可以在另一个维度自由旋转。因此,第一个关节通常被称为髋关节(hip),第二个关节被称为膝关节(knee)。你的膝盖通常只有一个自由度(向前/向后),而你的臀部有两个自由度(向前/向后和向内/向外)。髋部旋转的角度
θ
\theta
θ表示。
我们可以想象一个机械臂,其中两个关节可以有两个自由度,总共四个。此时的问题是,将有多种解决方案,使我们的方法不再有效。“腿状”机械臂(“Leg-like” robotic arms,意思是:有髋关节和膝关节的手臂)在游戏和整个行业中都很常见。所以这种方法可能值得研究。
如果你读过之前的文章,你可能会记得,如果目标在2D中是可到达的,那么总是有两个“镜面反射”解决方案(见下文)。
同样的问题也出现在3D中;这一次,解决方案是无限的。这是因为配置可以围绕由连接原点和目标的直线表示的对称轴旋转。解决方案是…只关注一个解决方案!在本教程中,我们将重点介绍最简单的查找方法,它假定(0,1,0)为“向上”方向
从二维到三维
到目前为止,我们只知道当运动被约束到XY平面时,如何求解逆运动学问题。从2D到3D的诀窍是重复使用2D解决方案。下面的动画显示了一个机械臂在3D空间中到达一个围绕Y轴旋转的点。很明显,手臂做的唯一事情就是旋转;它的角度A和B没有改变,只有θ改变。
这意味着,如果我们知道如何在XY平面上执行IK(我们知道!),就可以知道如何通过两个简单的旋转在整个XYZ空间上执行IK。从概念上讲,我们可以通过三个步骤来解决这个问题:
- 围绕Y轴旋转目标点,直到其位于XY平面上
- 移动机械臂,使其能够到达该点,就像在2D中一样
- 通过在Y轴上以相反方向旋转整个机械臂来“撤消”旋转
我们可以通过简单地执行二维逆运动学,而不是在XY平面上,而是在从机械臂根部到目标点的垂直平面上,来更有效地实现这一点。
绕Y轴旋转
要在3D中执行反向运动学,我们首先需要计算θ,它是整个机械臂旋转的角度。这是髋关节增加的额外自由度。
找到它的最佳方法是假设机械臂已经到达该位置(意味着C已经在目标位置),并计算得到的角度θ。由于θ是髋关节绕Y轴形成的角度,我们可以直接从顶部观察机械臂。在XZ平面(下图)上方的俯视图中,机械臂看起来像一条直线。这是因为,除了髋关节,其他两个关节是平面上的约束。
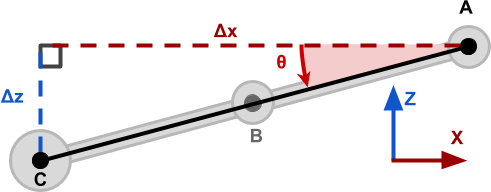
如果我们将线段
A
C
AC
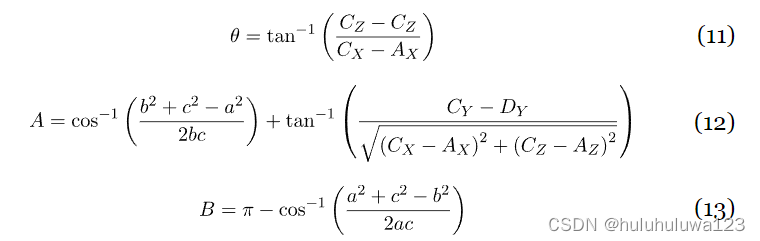
AC视为直角三角形的假设,我们可以使用一些三角学来计算角度θ:

WY平面上的逆运动学
从技术上讲,知道θ就足以解决三维逆运动学问题。实际上,我们可以做的是遵循上一节中介绍的算法:围绕Y轴将目标点旋转
−
θ
-\theta
−θ度,在XY平面上执行逆运动学,最后将整个手臂旋转
+
θ
+\theta
+θ度。
更快的版本是不在2D平面上执行反向运动学,而是直接在穿过髋关节和目标点的垂直平面上执行反向运动学。不幸的是,有些事情正阻止我们这样做。让我们再次看一看示意图,它显示了所使用的所有角度:
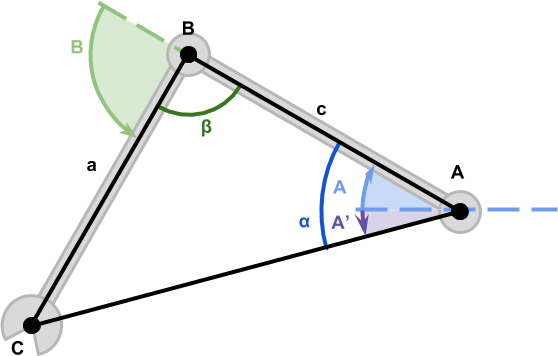
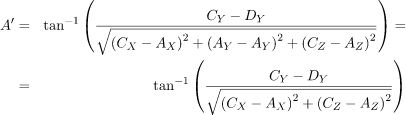
为了计算A,即控制第一个关节的角度,我们需要计算A’。这是第一个关节和目标点之间的角度,如果我们回忆一下用于计算A’的方程式(5),我们会注意到一个大问题:它假设所有点都位于XY平面上
在我们的3D场景中,不幸的是,机械臂会绕Y轴旋转θ度。然而,如果我们与机械臂一起旋转视图,新的图表基本保持不变。我们称之为新的参考坐标系WY,因为X轴现在被W取代,W是X轴,不绕Y轴旋转θ度。
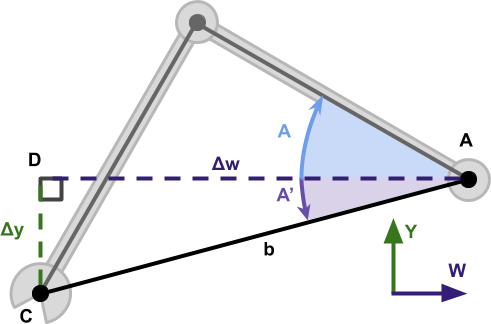
我们不能简单地做
D
x
−
A
x
Dx - Ax
Dx−Ax,就像我们对
Δ
y
\Delta y
Δy做的那样。这是因为C和D在y轴上对齐,而A和D不在X轴上对齐。它们与W轴对齐。因此,计算
Δ
w
\Delta w
Δw的最佳方法是获得从A到D的距离。这失去了
Δ
w
\Delta w
Δw的正负符号,但幸运的是,它在我们的计算中没有真正的问题。如果你的手臂恰好朝相反的方向移动,只需在代码中翻转
Δ
w
\Delta w
Δw符号即可。

其中
∣
A
D
‾
∣
\left | \overline{A D}\right |
∣∣AD∣∣是从A到D的段的长度。或者你也可以直接使用毕达哥拉斯定理(Pythagoras’ theorem)
在上面的等式中,毕达哥拉斯定理的Y贡献抵消了它本身,因为点D具有A的相同Y分量,所以它们的
Δ
y
\Delta y
Δy为零
现在,我们真的有了所有东西,可以在3D中对带有一个膝关节和髋关节的机械臂执行反向运动学:
















 2326
2326

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









