







 SVL-Simulator是一款由LG电子推出的基于Unity的多机器人仿真器,适用于自动驾驶汽车算法的开发与测试。该仿真器易于上手,并提供与Apollo等开源自动驾驶系统的集成方案。本文介绍其特点、硬件需求及安装步骤。
SVL-Simulator是一款由LG电子推出的基于Unity的多机器人仿真器,适用于自动驾驶汽车算法的开发与测试。该仿真器易于上手,并提供与Apollo等开源自动驾驶系统的集成方案。本文介绍其特点、硬件需求及安装步骤。
文章目录
什么是 SVL Simulation
- SVL Simulator : An Autonomous Vehicle Simulator
- 是有LG电子美国研发中心推出的一款基于Unity的用于自动驾驶开发的多机器人仿真器。
- SVL 的目标:提供了一个开箱即用仿真解决方案,可以满足开发人员专注于测试自动驾驶汽车算法的需求。
- SVL的特点:容易上手,直接提供了与Apollo、Autoware 等开源自动驾驶系统集成仿真的解决方案。
LGSVL Simulator Introduction
如何安装使用 SVL-Sim
硬件基础
跑自动驾驶这种大系统,对CPU和GPU还是有些要求的, 而且基于Unity和Unreal这些3D引擎的仿真器,渲染也需要很多GPU资源
- at least 4 GHz Quad core CPU
- NVIDIA GTX 1080 (8GB memory) or higher 显存最好大于10GB
- Windows 10 (64-bit), Ubuntu 18.04 (64-bit), or Ubuntu 20.04 (64-bit)
- 如果 SVL仿真器和Apollo 这种自动驾驶系统在同一台机器上跑,对系统资源的要求会更高一些
Tips:- 开发SVL模拟器在Windows下: SVL模拟器的完整功能在开发模式(在Unity编辑器)仅支持Windows
- 用SVL跑自动驾驶算法在Linux下: 用PythonAPI运行时SVL模板或Visual Scenario运行时的端到端自动驾驶仿真仅支持Linux
SVL-Sim安装
- 一种便捷的方式是直接使用Release的打包文件
- 另一种方式是源码编译安装, 可以了解其实现方式,定制化改造
前置依赖条件
- 显卡驱动 > 450:
- Vulkan 驱动
- 注册SVL账号
sudo apt install nvidia-driver-450
sudo apt remove mesa-vulkan-drivers
sudo apt install libvulkan1
二进制Release 版本的安装
- 下载地址:The Simulator release can be downloaded as a prebuilt binary from the simulator distribution. 例如: (svlsimulator-linux64-{release-version}.zip)
源码编译安装
体验玩法
键盘控车快速体验仿真器
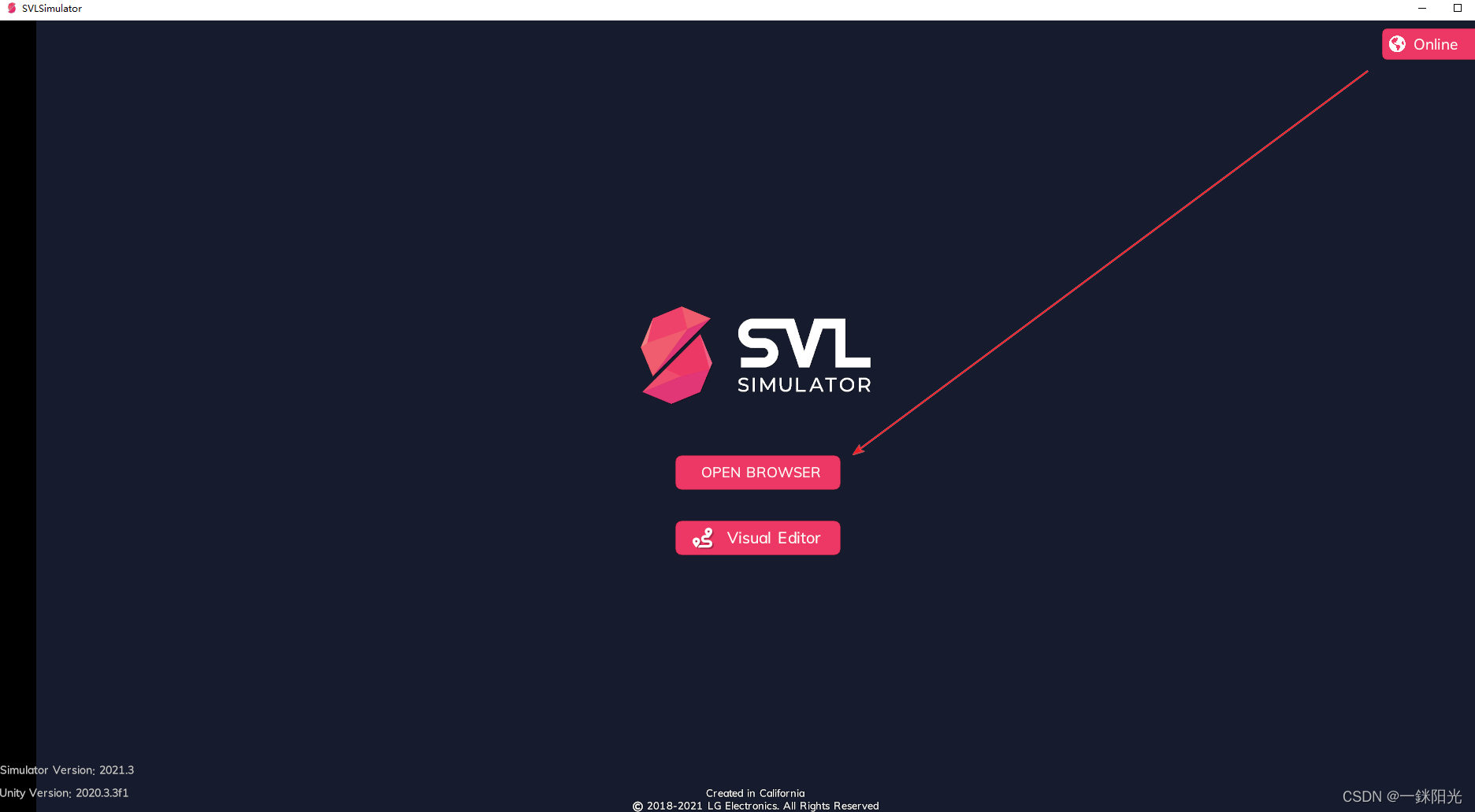
- 下载二进制可执行文件, 解压、打开
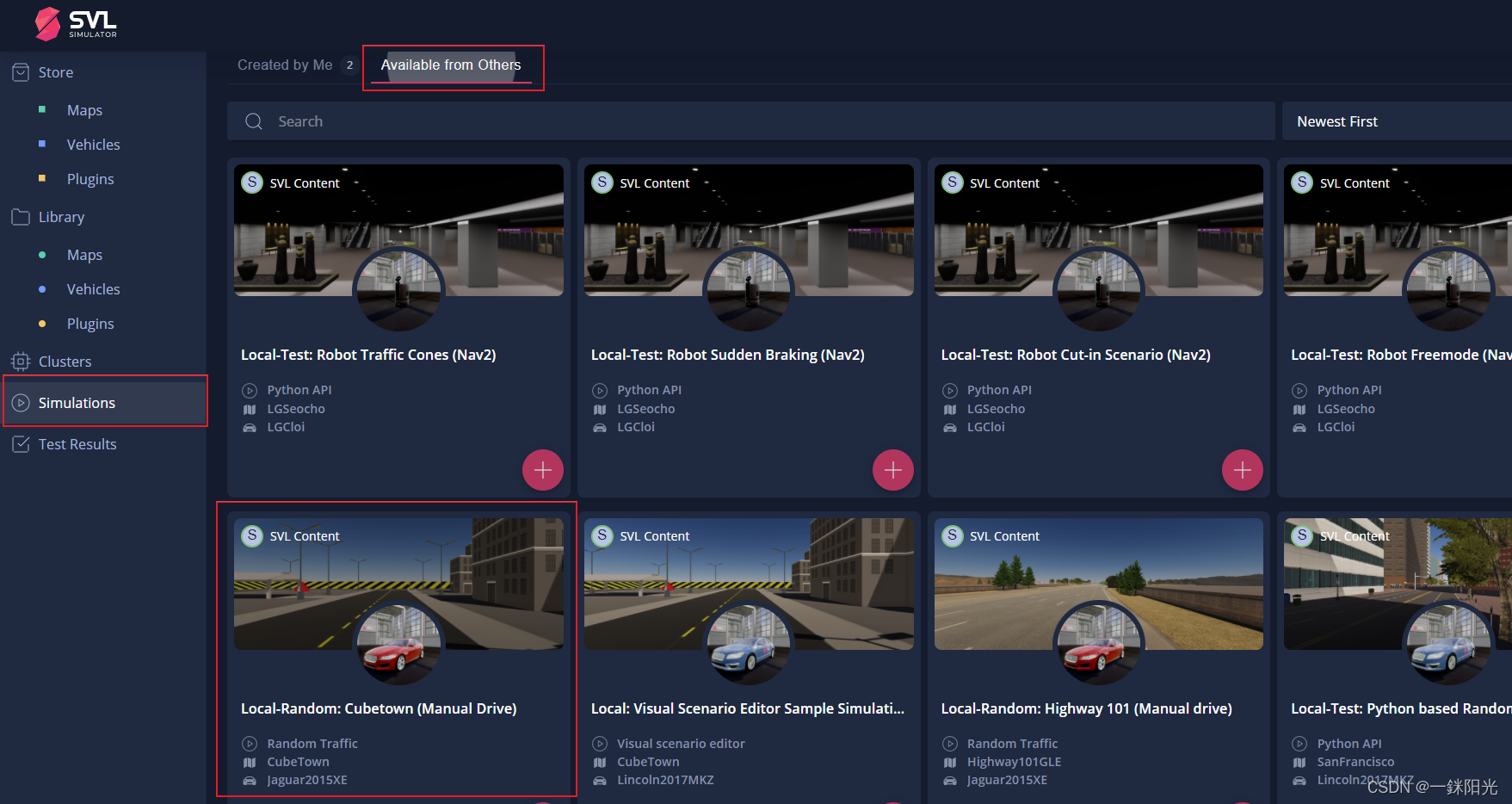
- 选择 Online --> 打开浏览器-> 接下来配置仿真器
- 选择车模型->选择Keyboard控制和通信方式,发布配置
- 启动仿真器
SVL-Simulation + Apollo AutoCar
docker pull lgsvl/apollo-5.0 ##拉取 Apollo docker
git clone --recurse-submodules https://github.com/lgsvl/apollo-5.0.git



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











