







VectorNet 是清华MARS Lab和Google Waymo联合在CVPR2020提出的一个基于Transformer的轨迹预测模型。在比较丰富和均衡的自动驾驶数据集上进行实际应用,效果还是相当优异的。
为了做好交互场景中障碍物车辆和行人的轨迹预测,需要考虑地图的静态特征和障碍物运动的动态特征。
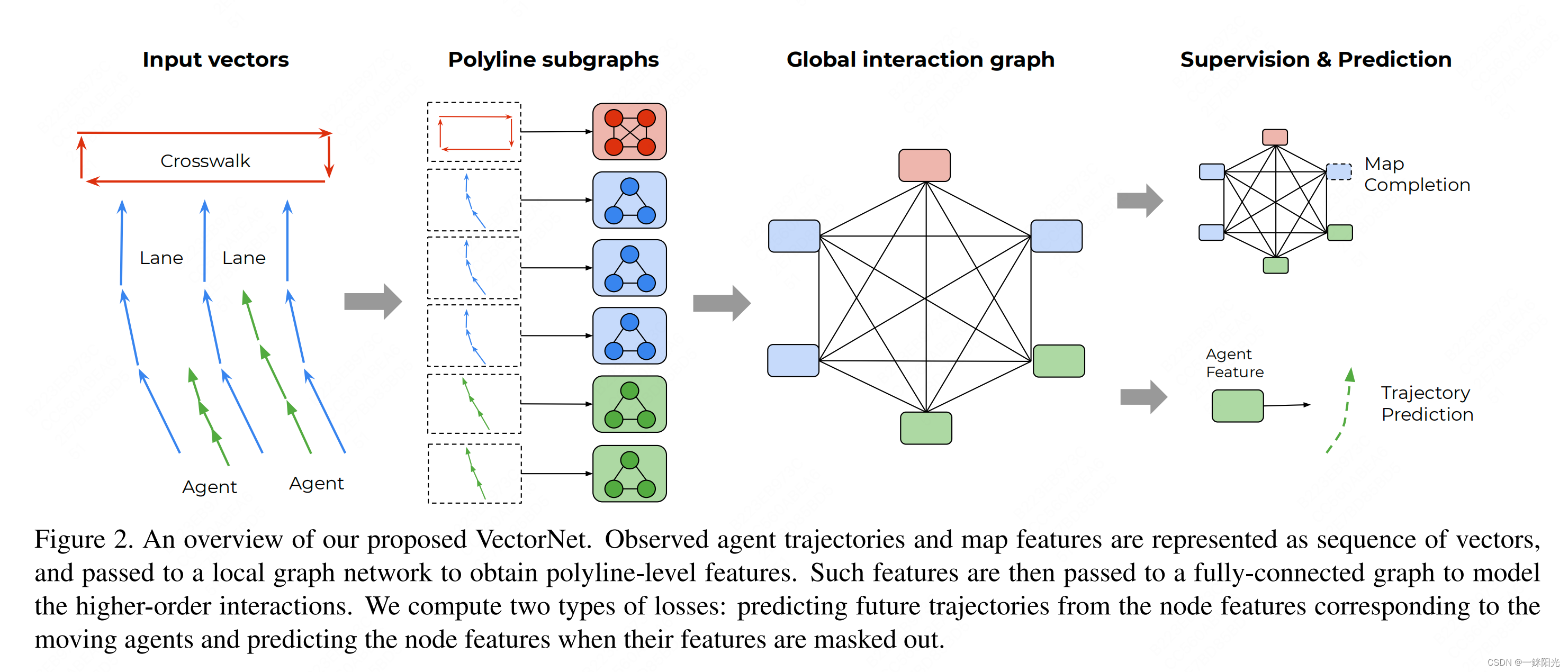
VectorNet的设计思想是将地图的静态特征和障碍物运动的动态特征进行统一的向量化表达,然后利用Transformer进行Encoder和Decoder,进行障碍物的轨迹预测。
VectorNet特征向量化表达
一、对于特征的表达
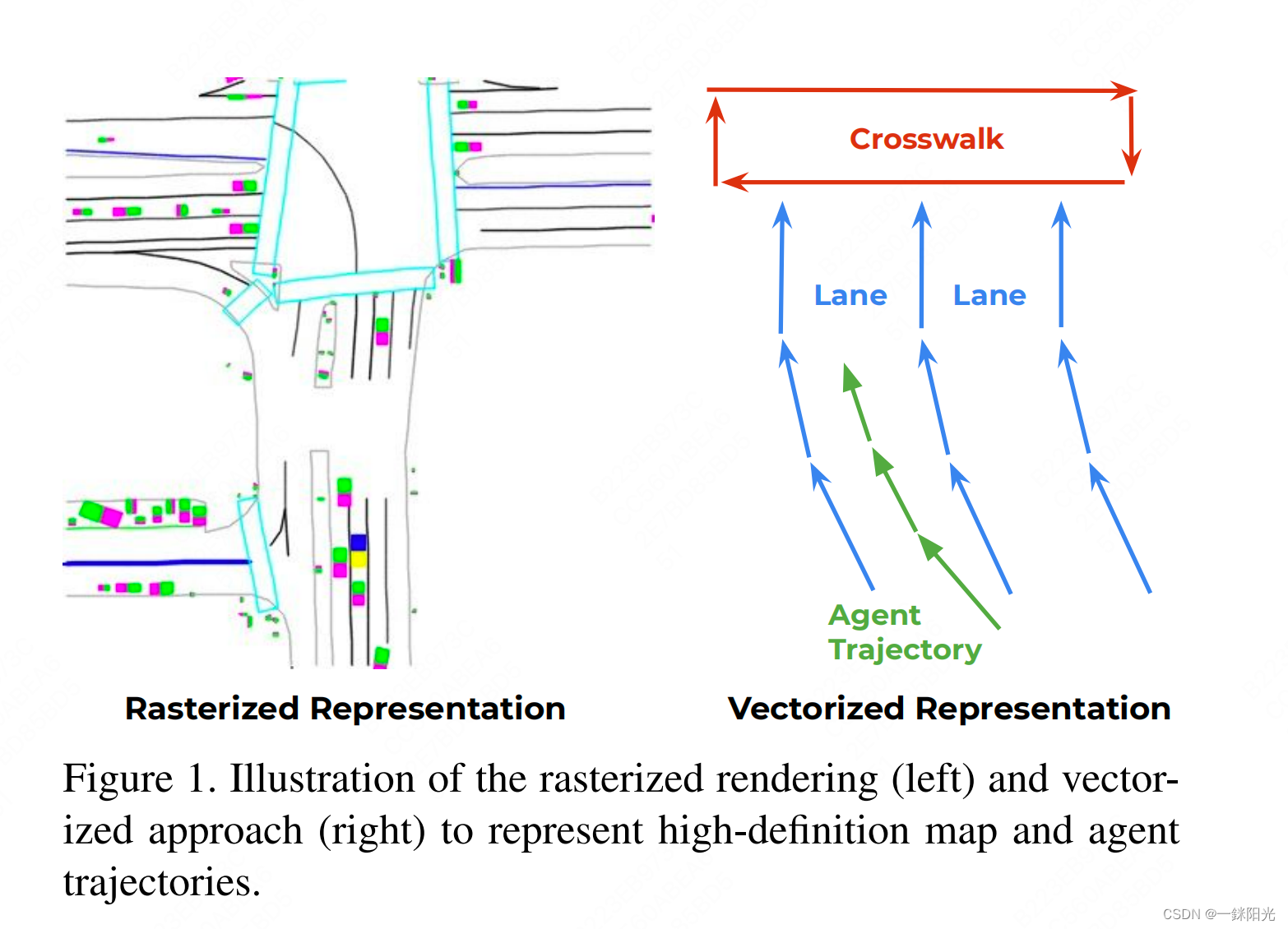
其他方法:像素栅格化的特征表示:
- render trajectories of moving agents and road context information as bird-eye images
- and encode them with convolutional neural networks (ConvNets)
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 9041
9041











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











