







🚀🚀🚀本文改进:BAM注意力,引入到YOLOv8,多种实现方式
🚀🚀🚀BAM在不同检测领域中应用广泛
🚀🚀🚀YOLOv8改进专栏:http://t.csdnimg.cn/hGhVK
学姐带你学习YOLOv8,从入门到创新,轻轻松松搞定科研;
1.BAM介绍
论文:https://arxiv.org/pdf/1807.06514.pdf
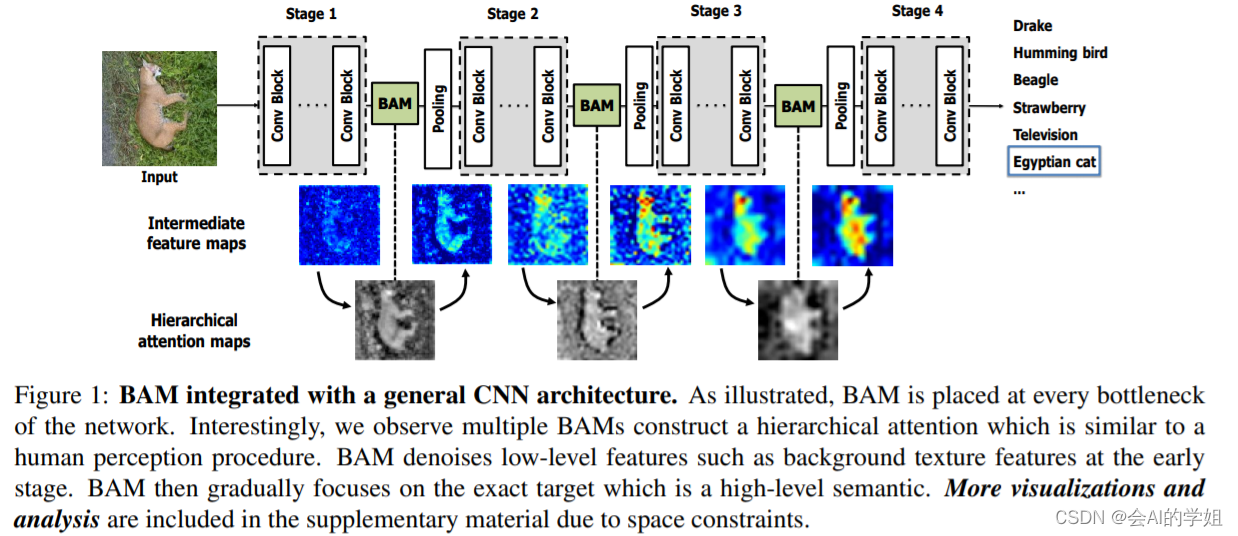
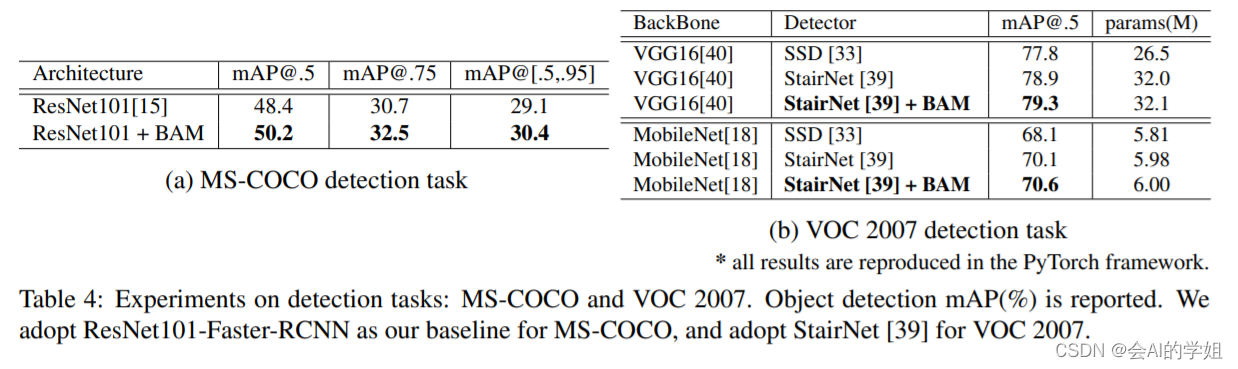
摘要:提出了一种简单有效的注意力模块,称为瓶颈注意力模块(BAM),可以与任何前馈卷积神经网络集成。我们的模块沿着两条独立的路径,通道和空间,推断出一张注意力图。我们将我们的模块放置在模型的每个瓶颈处,在那里会发生特征图的下采样。我们的模块用许多参数在瓶颈处构建了分层注意力,并且它可以以端到端的方式与任何前馈模型联合训练。我们通过在CIFAR-100、ImageNet-1K、VOC 2007和MS COCO基准上进行大量实验来验证我们的BAM。我们的实验表明,各种模型在分类和检测性能上都有持续的改进,证明了BAM的广泛适用性。
作者将BAM放在了Resnet网络中每个stage之间。有趣的是,通过可视化我们可以看到多层BAMs形成了一个分层的注意力机制,这有点像人类的感知机制。BAM在每个stage之间消除了像背景语义特征这样的低层次特征,然后逐渐聚焦于高级的语义–明确的目标。
作者提出了新的Attention模型——瓶颈注意模块,通过分离的两个路径channel和spatial得到attention map,减少计算开销和参数开销。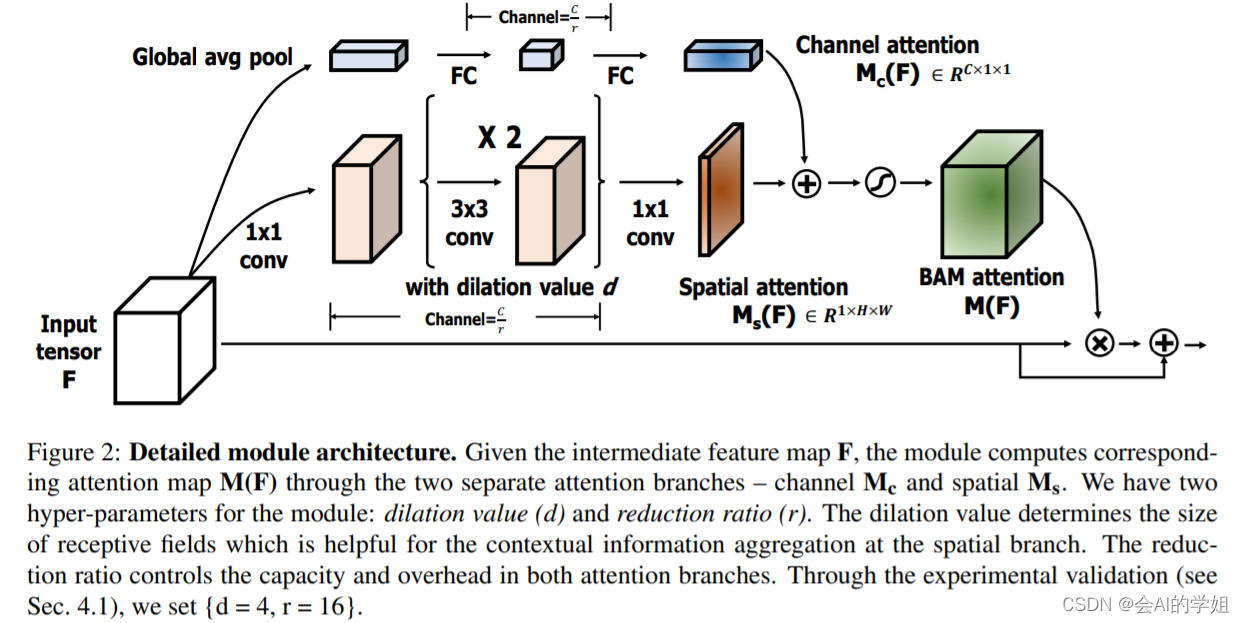
实验
BAM可以在大规模数据集中的各种模型上有很好的泛化能力,同时参数和计算的开销可以忽略不计,这表明提出的模块BAM可以有效地提高网络容量。另一个值得注意的是,改进的性能来自于只在网络中放置三个模块。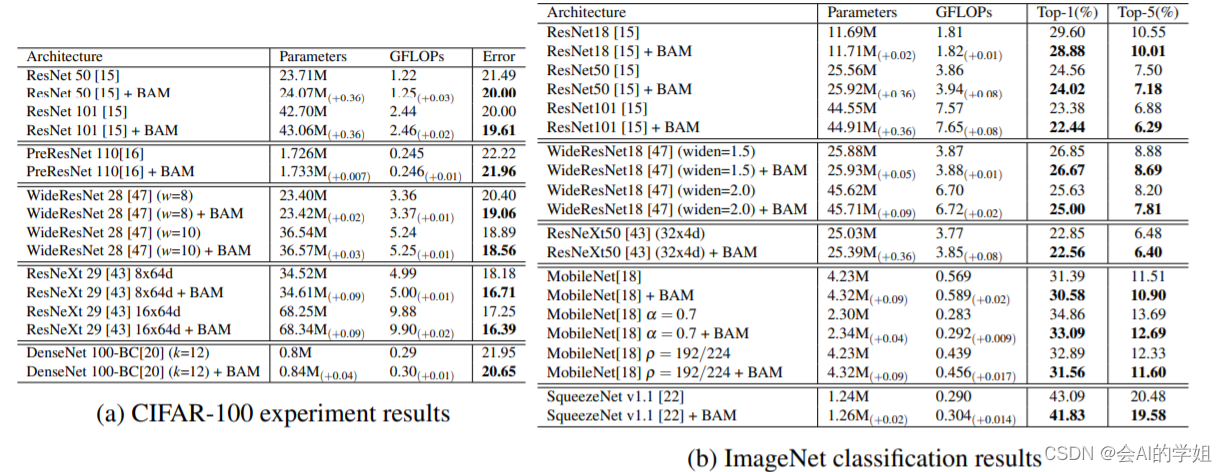
BAM提高了所有具有两个骨干网络的强大基线的准确性.BAM的准确率提高是以可忽略不计的参数开销实现的,这表明提高不是由于天真的容量增加,而是由于我们有效的特征细化。
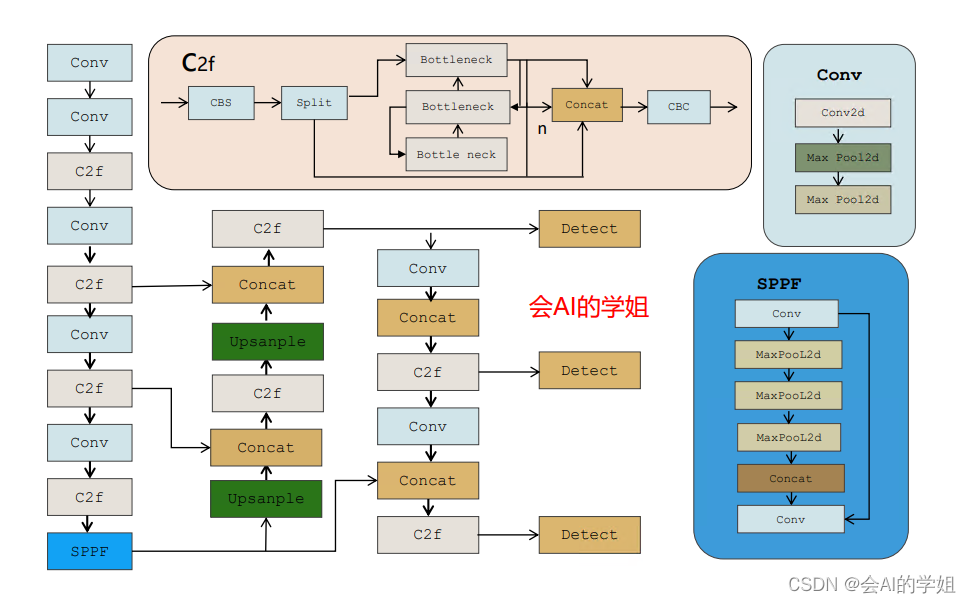
2.BAM加入YOLOv8
2.1加入ultralytics/nn/attention/attention.py
###################### BAM attention #### START ###############################
import torch
from torch import nn
import torch.nn.functional as F
class ChannelGate(nn.Module):
def __init__(self, channel, reduction=16):
super().__init__()
self.avgpool = nn.AdaptiveAvgPool2d(1)
self.mlp = nn.Sequential(
nn.Linear(channel, channel // reduction),
nn.ReLU(inplace=True),
nn.Linear(channel // reduction, channel)
)
self.bn = nn.BatchNorm1d(channel)
def forward(self, x):
b, c, h, w = x.shape
y = self.avgpool(x).view(b, c)
y = self.mlp(y)
y = self.bn(y).view(b, c, 1, 1)
return y.expand_as(x)
class SpatialGate(nn.Module):
def __init__(self, channel, reduction=16, kernel_size=3, dilation_val=4):
super().__init__()
self.conv1 = nn.Conv2d(channel, channel // reduction, kernel_size=1)
self.conv2 = nn.Sequential(
nn.Conv2d(channel // reduction, channel // reduction, kernel_size, padding=dilation_val,
dilation=dilation_val),
nn.BatchNorm2d(channel // reduction),
nn.ReLU(inplace=True),
nn.Conv2d(channel // reduction, channel // reduction, kernel_size, padding=dilation_val,
dilation=dilation_val),
nn.BatchNorm2d(channel // reduction),
nn.ReLU(inplace=True)
)
self.conv3 = nn.Conv2d(channel // reduction, 1, kernel_size=1)
self.bn = nn.BatchNorm2d(1)
def forward(self, x):
b, c, h, w = x.shape
y = self.conv1(x)
y = self.conv2(y)
y = self.conv3(y)
y = self.bn(y)
return y.expand_as(x)
class BAM(nn.Module):
def __init__(self, channel):
super(BAM, self).__init__()
self.channel_attn = ChannelGate(channel)
self.spatial_attn = SpatialGate(channel)
def forward(self, x):
attn = F.sigmoid(self.channel_attn(x) + self.spatial_attn(x))
return x + x * attn
###################### BAM attention #### END ###############################2.2 修改tasks.py
首先BAM进行注册
from ultralytics.nn.attention.attention import *函数def parse_model(d, ch, verbose=True): # model_dict, input_channels(3)进行修改
elif m is BAM:
c1, c2 = ch[f], args[0]
if c2 != nc:
c2 = make_divisible(min(c2, max_channels) * width, 8)
args = [c1, *args[1:]]2.3 yaml实现
2.3.1 yolov8_BAM.yaml
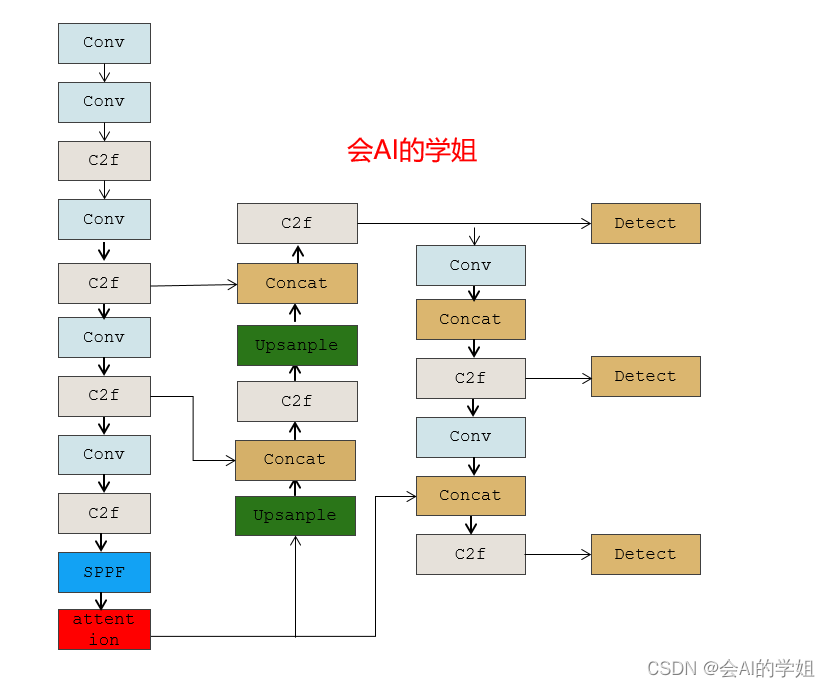
加入backbone SPPF后
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs
s: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPs
m: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPs
l: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPs
x: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs
# YOLOv8.0n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 3, C2f, [128, True]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 6, C2f, [256, True]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 6, C2f, [512, True]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 3, C2f, [1024, True]]
- [-1, 1, SPPF, [1024, 5]] # 9
- [-1, 1, BAM, [1024]] # 10
# YOLOv8.0n head
head:
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 3, C2f, [512]] # 13
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 4], 1, Concat, [1]] # cat backbone P3
- [-1, 3, C2f, [256]] # 16 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 13], 1, Concat, [1]] # cat head P4
- [-1, 3, C2f, [512]] # 19 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 10], 1, Concat, [1]] # cat head P5
- [-1, 3, C2f, [1024]] # 22 (P5/32-large)
- [[16, 19, 22], 1, Detect, [nc]] # Detect(P3, P4, P5)
2.3.2 yolov8_BAM2.yaml
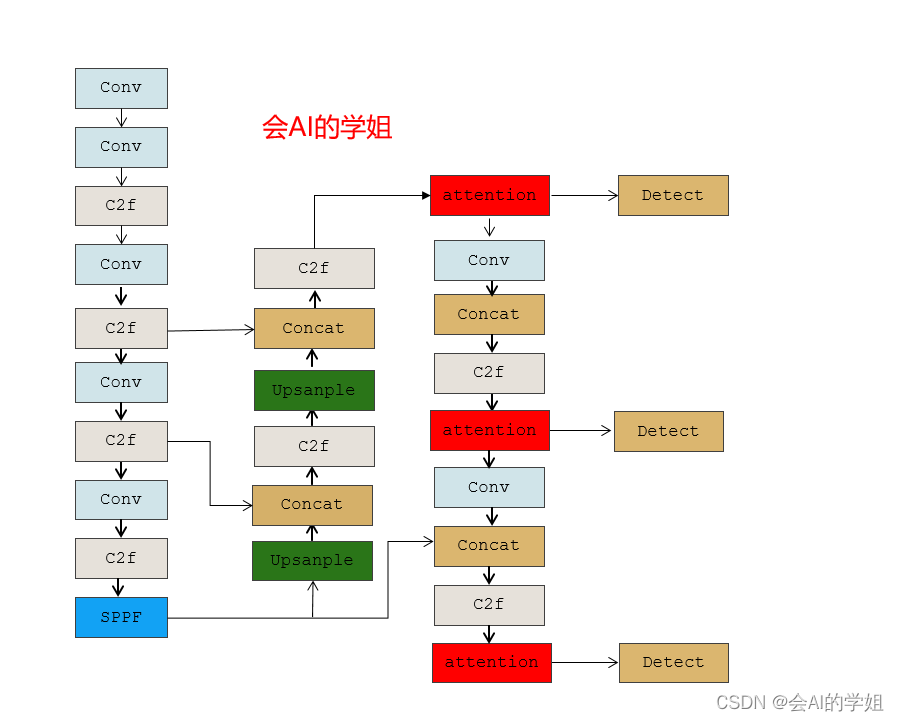
neck里的连接Detect的3个C2f结合
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs
s: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPs
m: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPs
l: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPs
x: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs
# YOLOv8.0n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 3, C2f, [128, True]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 6, C2f, [256, True]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 6, C2f, [512, True]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 3, C2f, [1024, True]]
- [-1, 1, SPPF, [1024, 5]] # 9
# YOLOv8.0n head
head:
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 3, C2f, [512]] # 12
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 4], 1, Concat, [1]] # cat backbone P3
- [-1, 3, C2f, [256]] # 15 (P3/8-small)
- [-1, 1, BAM, [256]] # 16
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 12], 1, Concat, [1]] # cat head P4
- [-1, 3, C2f, [512]] # 19 (P4/16-medium)
- [-1, 1, BAM, [512]] # 20
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 9], 1, Concat, [1]] # cat head P5
- [-1, 3, C2f, [1024]] # 23 (P5/32-large)
- [-1, 1, BAM, [1024]] # 24
- [[16, 20, 24], 1, Detect, [nc]] # Detect(P3, P4, P5)
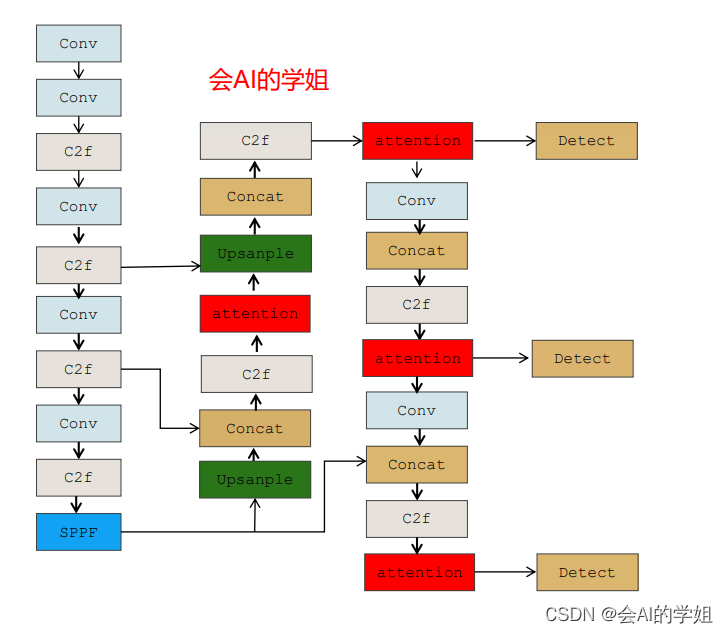
2.3.3 yolov8_BAM3.yaml
放入neck的C2f后面
# Ultralytics YOLO 🚀, GPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 1 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs
s: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPs
m: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPs
l: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPs
x: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs
# YOLOv8.0n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 3, C2f, [128, True]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 6, C2f, [256, True]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 6, C2f, [512, True]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 3, C2f, [1024, True]]
- [-1, 1, SPPF, [1024, 5]] # 9
# YOLOv8.0n head
head:
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 3, C2f, [512]] # 12
- [-1, 1, BAM, [512]] # 13
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 4], 1, Concat, [1]] # cat backbone P3
- [-1, 3, C2f, [256]] # 16 (P3/8-small)
- [-1, 1, BAM, [256]] # 17 (P5/32-large)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 13], 1, Concat, [1]] # cat head P4
- [-1, 3, C2f, [512]] # 20 (P4/16-medium)
- [-1, 1, BAM, [512]] # 21 (P5/32-large)
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 9], 1, Concat, [1]] # cat head P5
- [-1, 3, C2f, [1024]] # 24 (P5/32-large)
- [-1, 1, BAM, [1024]] # 25 (P5/32-large)
- [[17, 21, 25], 1, Detect, [nc]] # Detect(P3, P4, P5)


















 4537
4537

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











