






视频中这辆“狂飙”的自动驾驶车,正通过MPC轨迹跟踪控制器使其沿着规划好的轨迹行驶。作者用C++实现了MPC算法,并利用ROS与自动驾驶仿真器CARLA进行联合仿真,测试了算法的有效性,并将轨迹跟踪效果可视化了。
MPC全称模型预测控制(Model Predictive Control),是机器人、自动驾驶领域常用的控制方法,比如波士顿动力的人形机器人、量产的L2+辅助驾驶车都广泛使用了MPC控制。
除了MPC算法外,作者还通过C++实现了包括PID, LQR, Stanley控制算法,以及Lattice planner, Dijkstra等规划方法。
以上这些算法,正是目前企业界的主流规控算法,也是规划控制岗位对候选人基础知识的必备要求。说了这么多,你可能会有疑惑“自动驾驶规划控制的作用是什么”。
自动驾驶的规划控制,从导航地图中的路径规划开始,行驶过程中会根据感知与定位的信息不断做出变道或者跟车等不同的决策。根据上游决策的结果(变道还是跟车),运动规划模块实时输出舒适安全的轨迹信息以及速度、加速度和方向盘转角信息,交由控制模块执行。

(自动驾驶控制规划过程)
目前,规划控制(PnC)是机器人与自动驾驶行业人才急需的岗位之一,对于车辆工程、机械、电子信息、自动化等专业的同学有着较大的新引力,同时也有一定的入门门槛。如果你想通过3-4个月,快速学习企业界主流的规划控制算法,这里给你推荐上述视频作者的一门在线课程《自动驾驶控制与规划》。
课程讲师乌宁博士毕业于新加坡国立大学,具有10年以上规划控制研发经验。课程详细讲解了PID, LQR, MPC等自动驾驶常用的控制算法,以及动作规划、决策规划、路径规划等规控岗位必备的基础知识。同时配套了6个实践Project,教给大家如何将算法落地应用在自动驾驶场景中。
本期课程还开设了讲师直播答疑环节,老师将会面对面解决同学们学习过程中遇到的各种困难。
01
课程讲师

博士毕业于新加坡国立大学。具有10年以上机器人规划控制的研发经验,获得多项自动驾驶专利,并发表多篇机器人、自动驾驶论文。
02
项目实践



免费领取试听,请扫码添加工作人员
请务必备注209,优先通过哦!

03
课程收获
1. 了解自动驾驶的规划控制在整个自动驾驶中的作用;
2. 学会如何建立车辆几何模型、车辆运动学模型以及车辆动力学模型,如何对一些重要的参数进行辨识;
3. 学会设计多种控制器(PID, LQR, MPC)去解决自动驾驶中的控制问题,提升车辆的轨迹追踪、自适应巡航等的性能;
4. 学会如何通过有限状态机(Finite-state machine)在动态环境下规划出一条避开障碍物并符合车辆动力学的路径,如何在复杂环境下做出合理决策等。
5. 掌握规划领域的Dijkstra,A*等路径规划的方法,运动规划的方法以及在不确定性条件下的规划问题。
本课程从基础的车辆物理模型出发,通过对不同场景及应用下车辆模型的分析,详细阐述车辆控制学及路径规划的知识体系。通过将理论与实际车辆规划控制中的问题相结合,从而让大家达到融会贯通的效果。
04
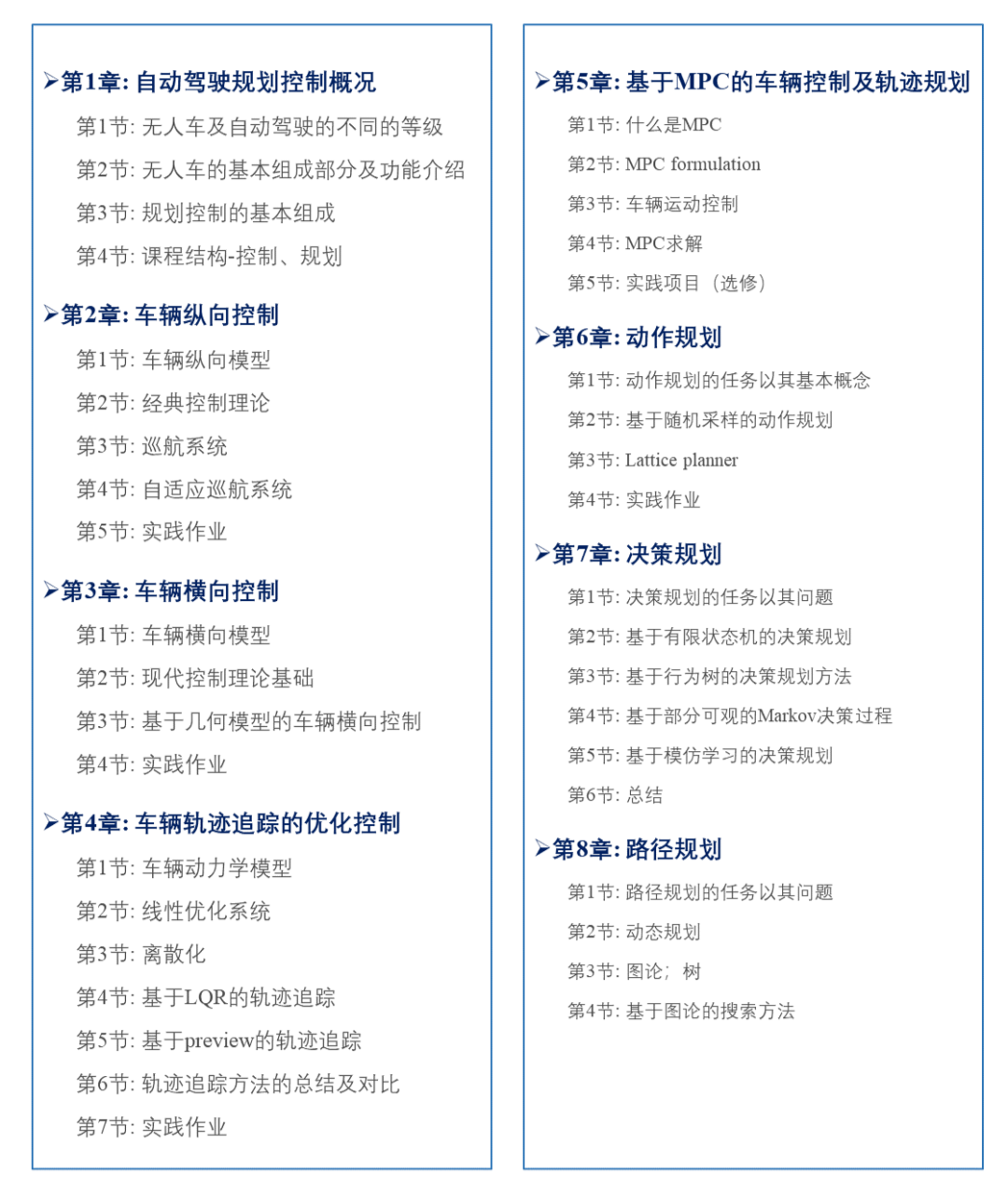
课程大纲
05
适合人群
1.希望从事自动驾驶规划控制研发的在校学生,尤其是机械、电子电气、计算机、自动化等专业的同学。
2.已经在从事自动驾驶规划控制相关领域的研发工程师。
3.自动驾驶或者机器人企业中其他方向的研发工程师,以及系统工程师。
06
课程服务
1.直播答疑
本次课程配备直播答疑服务,学员可面对面与讲师交流,讲师将会以直播的形式解决每一位同学学习过程中遇到的难题。
2. 三师助力
讲师&助教微信群及时答疑解惑,班主任全程带班督学,帮你克服拖延,不断进步。
3. 定期班会
助教1V1批改作业,并在班会中进行讲评和指导;在班会中,学习更多技巧;在交流中收获更多思路。
07
其他收获
1. 优质的学习圈子
你的同学大多是来自985、211及海外院校硕博,在这里大家一起学习、进行讨论与研究。独一无二的优质圈子将是你未来学习与就业的宝贵资源。

2. 企业认可的证书
学完课程后将有机会收获优秀学员证书、毕业证书,为你的简历加分添彩。

08
抢占名额
免费领取试听,请扫码添加工作人员
请务必备注209,优先通过哦!
















 4420
4420











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









