






作者 | 流川峰 编辑 | 深蓝学院
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【SLAM】技术交流群
本文介绍了一种新型的LiDAR+惯性导航系统,称为Point-LIO。该系统利用点云数据进行环境建模和高精度运动估计,结合了LiDAR和IMU的优点,能够在高速运动和极端环境下实现稳健的定位和建图。
算法的关键是引入了一种基于时序约束的特征提取和匹配方法,该方法利用IMU数据估计出的运动信息对点云进行滤波和聚类,从而提高数据的有效性和计算效率。Point-LIO在精度和时间消耗方面一直表现出好的一致性,表明Point-LIO的计算效率高,鲁棒性好,通用性强。
最后,本文展示了Point-LIO的两个示例应用,一个是面临高角速度(59rad s−1)的竞速四旋翼无人机,另一个是面临高角速度(25rad s−1)的自旋转无人机。
代码在Github上开源:https://github.com/hku-mars /Point-LIO.git
论文地址:https://www.researchgate.net/publication/369891453_Point-LIO_Robust_High-Bandwidth_Light_Detection_and_Ranging_Inertial_Odometry
Point-LIO的两个关键特点是实现高带宽LiDAR惯性里程计(LIO)和一个随机过程增量的运动学模型。第一个特点是点对点的LIO框架,即在每个LiDAR点测量时更新状态,而不是将它们积累到帧中。
这种点对点的更新允许极高频率的里程计输出,显着增加了里程计带宽,并从根本上消除了激进运动中帧内假运动畸变。第二个关键特点是一个随机过程增量的运动学模型,该模型将IMU测量建模为输出,而不是现有滤波器式里程计或SLAM系统中的输入。新的建模方法使得在激进运动中即使IMU测量饱和也能实现精确的定位和可靠的建图。
Point-LIO使用增量k-d tree(ikd-Tree)组织地图和紧密耦合的流形卡尔曼滤波器进行状态估计,在此基础上,Point-LIO具有两个关键特点,实现高带宽LiDAR惯性里程计(LIO)。
本文在实际的室内和室外环境下进行了各种实验,评估了不同的固态LiDAR,结果表明Point-LIO能够在严重的振动和激进运动下提供准确、高频率的里程和可靠的地图,即使在IMU测量范围之外也能保持高角速度(75 rad s−1)。本文还在多线旋转LiDAR上进行了实验,结果表明Point-LIO能够在高速运动和极端环境下实现稳健的定位和建图。
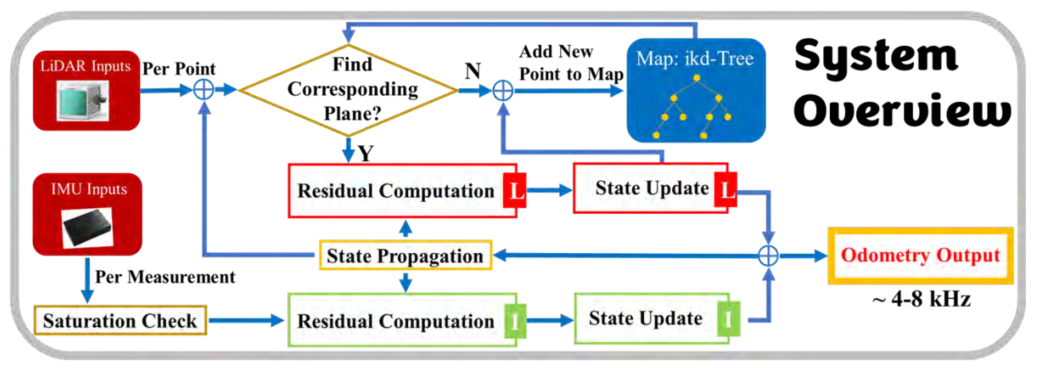
图1:Point-LIO的系统概述
如图1所示。连续采样的LiDAR点和IMU数据都用于在各自的时间戳更新状态,从而获得极高速率的里程计输出,即在实际中为4-8 kHz。特别是,对于接收到的每个LiDAR点,从地图中搜索相应的平面。如果点与地图中的点拟合的平面相匹配,则使用流形卡尔曼滤波器计算残差以更新系统状态。
优化后的姿态最终将LiDAR点注册到全局帧并合并到地图中,然后进行下一次测量(LiDAR点或IMU数据)。否则,如果点没有匹配平面,则由卡尔曼滤波预测姿态直接添加到地图中。
为了实现快速平面对应搜索,同时允许新的注册点,我们使用了最初在fast - lio2中开发的增量k-d树结构ikd-Tree。每次IMU测量时,IMU各通道的饱和度检查是分开进行的,有饱和值的通道不用于状态更新。
在本节中,我们评估了我们开发的系统在三个方面的性能:
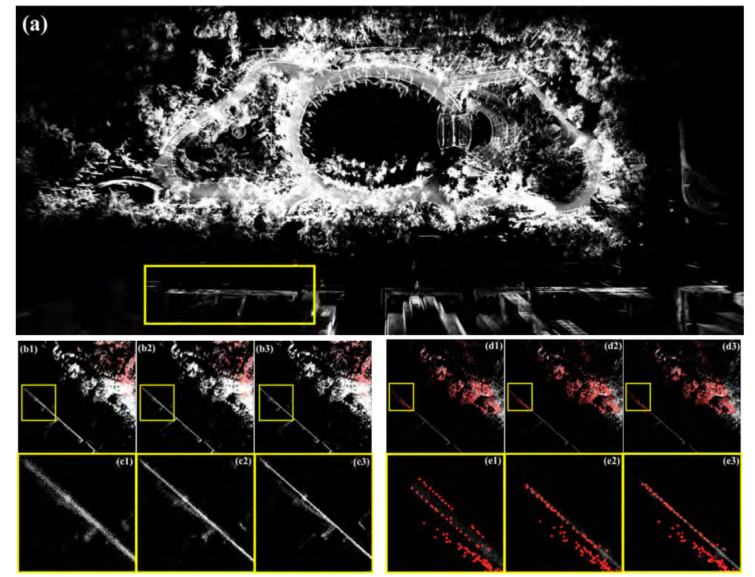
1)消除运动畸变
2)具有高速率和高带宽的里程计
3)具有饱和IMU测量的状态估计。
提出的Point-LIO系统是基于C++和机器人操作系统(ROS)实现的。扩展卡尔曼滤波器是基于我们以前的工作开发的IKFoM工具箱实现的。
我们使用快速LIO2中开发的增量kd树ikd-Tree作为我们的映射结构,其默认参数为:本地地图大小2000 m,空间下采样分辨率0.25 m,ikd-Tree的重新平衡阈值为bal=0.6, del=0.5,用于平行重建子树的子树大小阈值为1500。虽然我们的系统设计为在每个LiDAR点接收后执行状态估计,但实际上受到LiDAR制造商提供的驱动程序的限制,LiDAR点在累积完整个扫描后才会被打包发送到LIO系统。
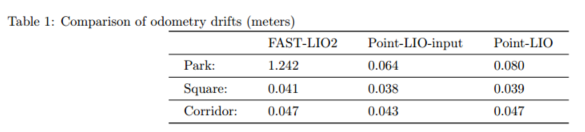
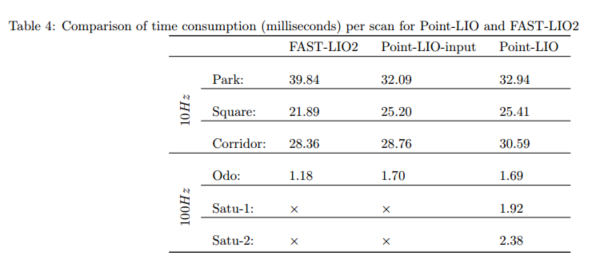
为适应这种实际限制,Point-LIO将所有包含在接收包中的LiDAR点和IMU数据按其各自的时间戳进行排序。然后,按顺序处理经过排序的数据。在所有评估中,我们将Point-LIO与最先进的基于帧的里程计FAST-LIO进行比较。FAST-LIO2的所有实验结果都使用默认参数值的公共版本FAST-LIO2收集。
由于FAST-LIO2对每个接收的LiDAR扫描进行0.1 s的处理,因此我们将Point-LIO的处理时间限制为0.1 s。在所有实验中,Point-LIO都表现出比FAST-LIO2更好的性能,特别是在高速运动和极端环境下。
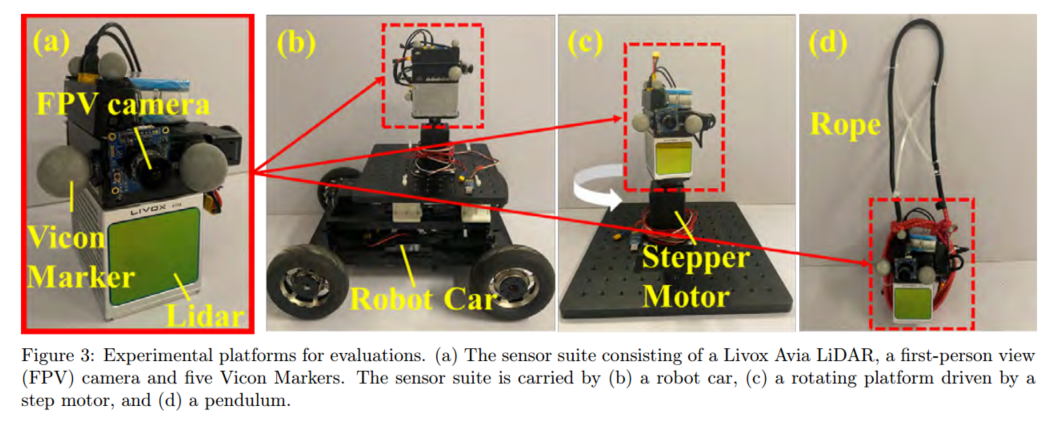
图2 评估的实验平台
本文还介绍了Point-LIO的两个示例应用。第一个应用是面临高角速度(59rad s−1)的竞速四旋翼无人机。实验结果表明,Point-LIO能够在高速运动和极端环境下提供准确、高频率的里程和可靠的地图。第二个应用是面临高角速度(25rad s−1)的自旋转无人机。实验结果表明,Point-LIO能够在复杂环境下进行可靠的定位和建图。


总之,本文介绍了一种新型LiDAR+惯性导航系统—Point-LIO。实验结果表明,Point-LIO具有较强的鲁棒性和高精度性能,并能够在复杂环境下进行可靠的定位和建图。这种技术有望应用于机器人技术、自主导航、交通运输等领域,为未来的机器人技术和应用提供了指引和参考。
视频课程来了!
自动驾驶之心为大家汇集了毫米波雷达视觉融合、高精地图、BEV感知、传感器标定、传感器部署、自动驾驶协同感知、语义分割、自动驾驶仿真、L4感知、决策规划、轨迹预测等多个方向学习视频,欢迎大家自取(扫码进入学习)

(扫码学习最新视频)
国内首个自动驾驶学习社区
近1000人的交流社区,和20+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(分类、检测、分割、关键点、车道线、3D目标检测、Occpuancy、多传感器融合、目标跟踪、光流估计、轨迹预测)、自动驾驶定位建图(SLAM、高精地图)、自动驾驶规划控制、领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!
【自动驾驶之心】全栈技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多传感器融合、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向;
添加汽车人助理微信邀请入群
备注:学校/公司+方向+昵称

















 1131
1131

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









