






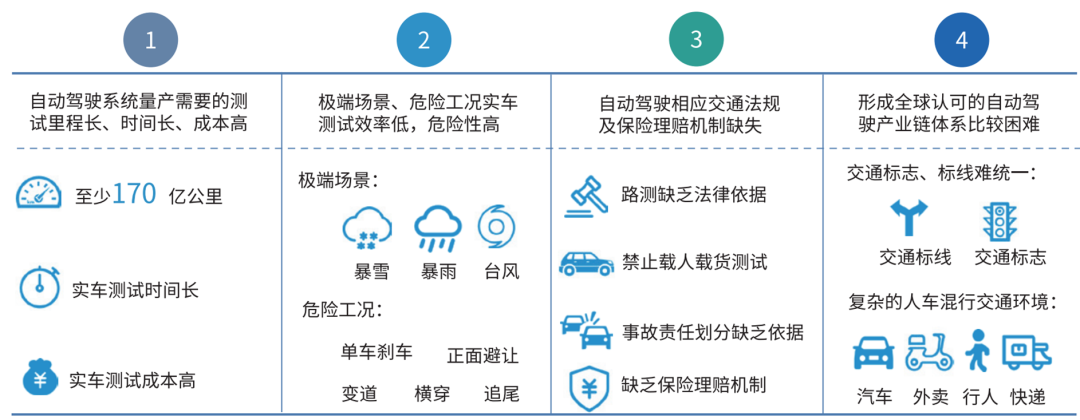
自动驾驶为什么需要仿真?
在谈这个问题之前,首先我们需要了解什么是仿真?为什么需要仿真?仿真是指在虚拟环境来模拟现实真实世界的物理、化学、行为等过程。在自动驾驶领域,仿真用于创建虚拟驾驶环境,以测试和验证自动驾驶系统的性能。通过在虚拟环境中运行自动驾驶车辆,开发者可以模拟各种驾驶条件、天气状况、道路布局和交通情况,从而评估自动驾驶技术的安全性和可靠性。实车测试非常昂贵,而且安全性没有保证,所以自动驾驶的仿真是量产方案落地前最后一道测试。
目前自动驾驶行业常用的仿真工具有哪些?
在自动驾驶技术的开发与验证过程中,仿真平台已经成为一个至关重要的工具。基于仿真平台,开发者可以快速构建复杂的交通场景,涵盖多种道路条件、天气状况、以及车辆和行人的动态交互。这不仅能够加速算法迭代,同时也能在没有风险的前提下,测试极端情况下的车辆行为。
目前,行业内有多个广受使用的自动驾驶仿真平台,各自具备独特的功能与优势。例如,SUMO专注于交通仿真,能够模拟大规模城市中的交通动态,非常适合研究车流、交通管理系统和道路网络的优化;PreScan是一款侧重于传感器建模的仿真工具,常用于自动驾驶车辆的传感器在环测试,其对雷达、激光雷达、毫米波雷达、摄像头等传感器建模有较强的表现;而工业级的VTD作为最早支持ASAM OpenX系列标准之一的仿真平台,早就成为了众多主机厂的主流方案。它提供高保真车辆动力学仿真,非常适合进行精确的车辆控制与动态测试。
除此之外,Apollo是由百度开发的自动驾驶仿真平台,与百度Apollo自动驾驶栈紧密结合,能够实现全栈自动驾驶功能的测试与验证,非常适合大型企业使用。但在众多仿真平台中,CARLA作为为数不多的开源平台,以其灵活性和强大的功能在研究界和工业界都获得了广泛的应用和认可。
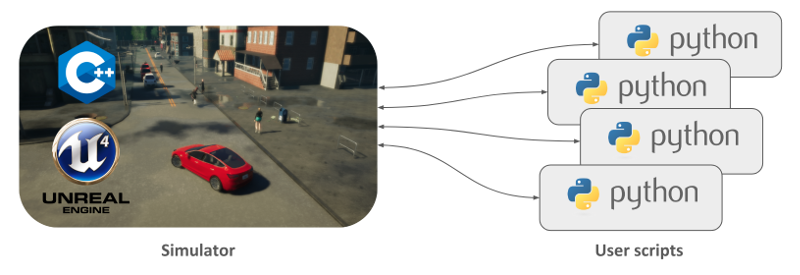
为什么用Carla进行仿真?
Carla是一个开源的自动驾驶仿真平台,与其他开源平台相比,它的优势在于支持高精度的地图和多种传感器模拟,如相机、激光雷达和雷达。此外,Carla 还提供了通过Python API进行编程控制的功能,使用起来更加便捷,学习曲线较为平缓,因此在科研界得到了广泛应用这也使得工业界在将最新的研究成果转化为实际应用时更加高效。
通过高精度传感器模拟和逼真的虚拟场景,它支持感知模块、路径规划、行为决策、强化学习等的开发和测试。无论是仿真极端环境还是大规模并行测试,CARLA 都能帮助研究人员在没有真实世界风险的前提下,快速迭代和优化自动驾驶算法。这是推动自动驾驶技术前进的核心工具。

入门难,门槛高?
在各种自动驾驶社区和技术讨论群中,关于CARLA的问题经常被提起。这反映出,尽管仿真是自动驾驶开发中的关键环节,然而,由于其涉及的知识面广泛、内容复杂,许多开发者,尤其是初学者,常常感到无从下手。除了需要理解各类仿真工具的使用,还要掌握传感器模拟、UE渲染引擎、高精地图应用等多领域的知识。
为此自动驾驶之心联合业内知名仿真专家共同研发了一门面向工业级的Carla仿真项目实战课程。本课程将通过项目实战的方式,帮助大家将这些看似零散的知识点有机串联起来,逐步建立起系统的理解。学员不仅会学习如何在CARLA环境中进行场景设计、传感器设置和仿真地图生成,还会探索如何结合深度学习进行感知算法的训练和测试。此外,课程还会针对实际操作中经常遇到的挑战提供实用的解决方案。
不仅如此,课程的内容不仅局限于理论讲解,还将带领学员动手实践,通过真实项目体验CARLA在自动驾驶仿真中的强大功能,帮助学员真正将仿真技术应用到实际项目中,加速从初学者到行业从业者的转变。
早鸟优惠限时秒杀!扫码学习课程
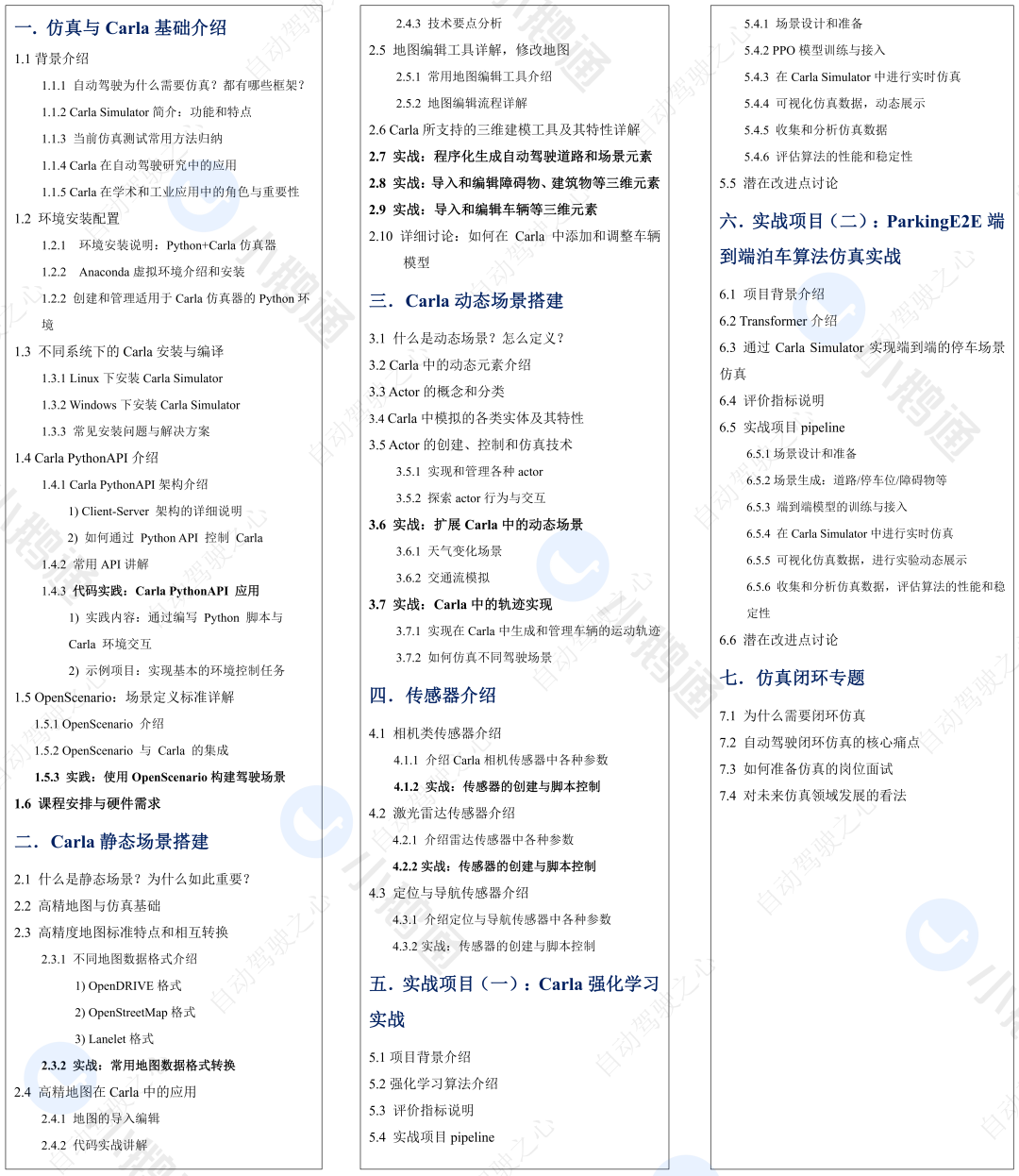
在接下来的课程中,我们将一起使用Carla这一强大的开源仿真平台,从基础的环境配置开始,到场景搭建、传感器模拟,再到自动驾驶算法的测试与评估,逐步掌握自动驾驶仿真的核心技术,大纲一览:
我们将会怎么展开这门课?
课程针对仿真领域常用的传感器部分、动态场景搭建、静态场景搭建、端到端模仿学习、强化学习等多个内容展开了详细剖析。知其然知其所以然,每个章节配备了多个实战内容,后期更有目前大火的端到端模型仿真与强化学习大项目。末尾也给大家准备了自动驾驶仿真领域的一些行业分享与求职相关内容,助力求职和职业生涯规划。
本门课程面向在校从事自动驾驶与仿真方向的硕士、博士,以及正在从事相关研究的工作人员、想要转入仿真方向的同学,正在准备相关方向岗位的校招、社招同学,需要项目来提升自己的同学;
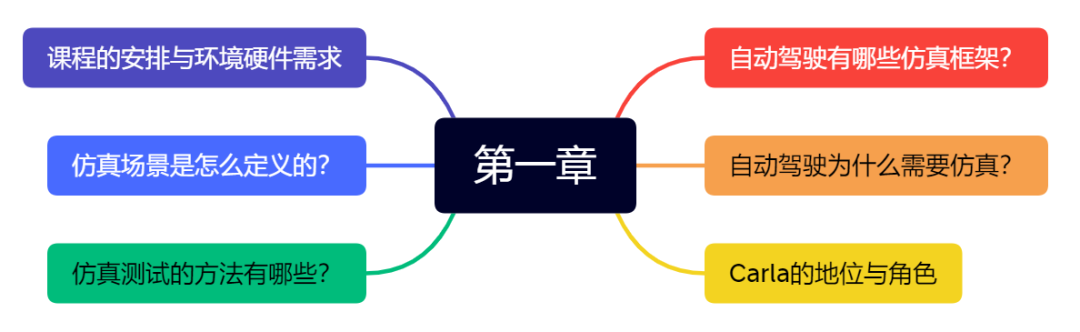
第一章 仿真与Carla基础介绍
第一章为基础篇,主要为大家讲述自动驾驶仿真背景、Carla仿真环境安装配置,重点关注仿真常用的测试方法、评测标准,以及整个课程的教授方式与硬件需求。
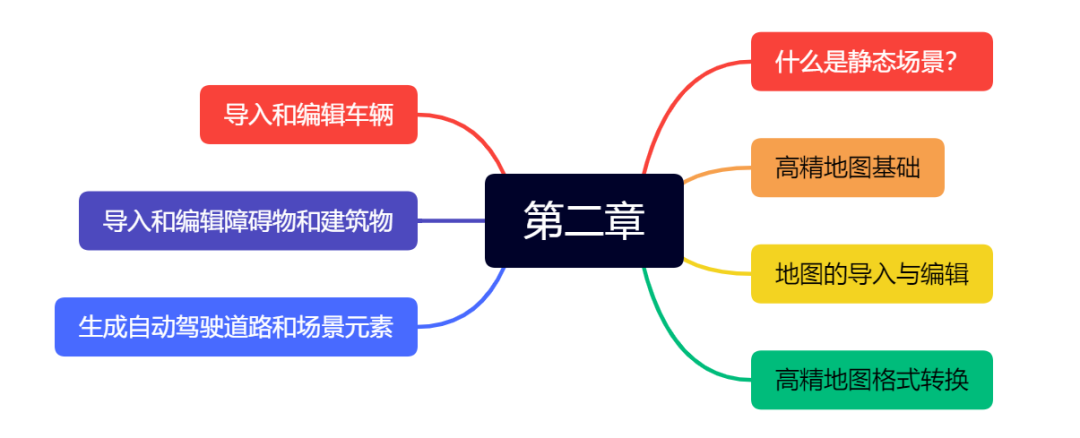
第二章 Carla静态场景搭建
第二章主要给大家介绍静态场景搭建部分,对静态场景的定义做了详细阐述。后续针对高精地图的数据格式、高精地图在Carla中的应用、地图如何编辑等多个核心内容展开了教授。第二章的结尾部分配有3个实战,助力学员能够更深入理解Carla中的静态场景搭建。
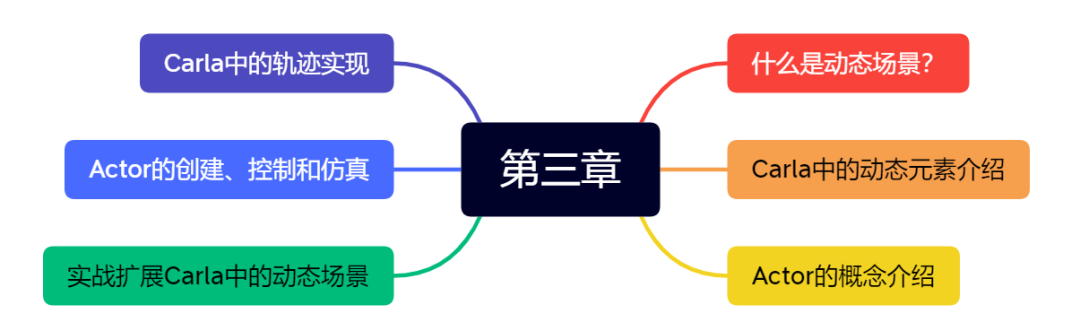
第三章 Carla动态场景搭建
第三章主要给大家介绍动态场景搭建部分,对动态场景与动态元素展开了详细讨论。针对actor的创建、仿真和控制等内容进行了深入的探讨,后续两个实战助力大家更深入理解Carla中的动态场景搭建。
第四章 传感器介绍
第四章主要为大家介绍Carla中的相机、激光雷达、惯导等传感器部分,更深入了解传感器的创建与使用,助力搭建自己的工程。
第五章 Carla强化学习实战
第五章主要针对强化学习在自动驾驶中的仿真,对评测指标、场景设计、强化模型训练与接入、实时仿真、可视化展开了详细阐述,本章末尾继续讨论可优化的点,代码提供给学员反复学习。

第六章 端到端泊车算法仿真实战
第六章针对目前大火的端到端模型仿真展开,基于ParkingE2E算法。详细阐述了端到端评测标准、场景搭建、端到端模型的训练与接入、实时仿真等,章节末尾将会和大家一起探讨潜在的优化点。

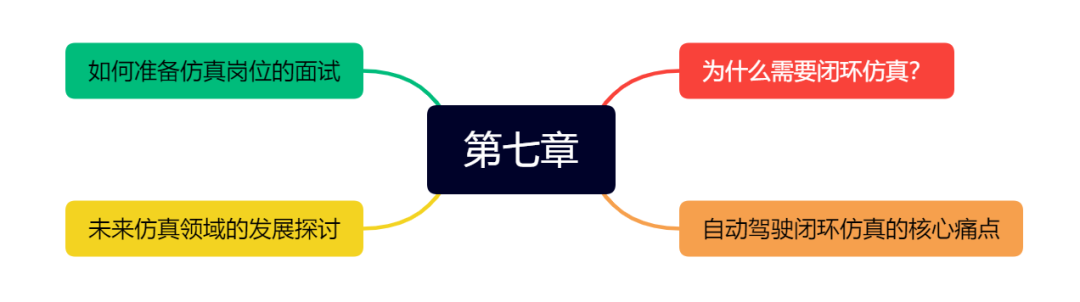
第七章 仿真闭环专题
第七章主要是和大家聊一下闭环仿真和行业发展相关的内容,也包括了求职面试部分,相对发散,期望能够给大家带来更多领域和面试灵感。
主讲老师
德国TU9硕士,自动驾驶仿真工程师,专注于基于CARLA的场景建设与仿真系统开发,拥有多年项目经验。发表多篇学术论文和专利,涵盖仿真算法优化及场景生成领域。
课程基础
一定基础的Python/C++编程,有Ubuntu系统使用经验;
电脑需要自带GPU,能够通过CUDA加速 (显存至少12GB) ,至少有8GB内存;
学后收获
熟悉目前自动驾驶使用最广的仿真框架Carla;
熟悉常见的动态障碍物、静态障碍物建模与场景搭建;
对目前最火的强化学习仿真方案和端到端自动驾驶仿真方案有着深入了解;
能够使用Carla搭建自己的项目仿真;
完成本课程后,将能够独立使用Carla进行自动驾驶仿真,具备独立设计和评估自动驾驶仿真实验的能力;
适合人群
自动驾驶领域的本科/硕士/博士和相关研究人员;
对Carla和自动驾驶仿真感兴趣的开发者;
对自动驾驶闭环仿真测试有需求的专业人士;
对目前大火的端到端模型仿真有需求的同学;
机器人仿真等其它领域相关同学;
教学方式
离线教学与vip微信群内答疑;
群内互动问答和讨论;
实际仿真项目实践;
开课时间
2024.10.25正式开课,离线教学,微信群内答疑。
购买说明
课程购买后,3天内支持退款,如需开发票欢迎联系小助理微信AIDriver004咨询。
扫码学习&咨询小助理
早鸟优惠限时秒杀!扫码学习课程
咨询小助理了解更多
















 1181
1181

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









