







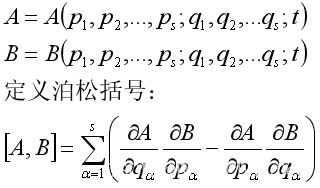
- 在经典力学中,泊松括号的定义是两个动态变量之间的反对称可交换二次式。泊松括号通常被用来表示物理量之间的相互作用关系,如力和速度之间的相互作用。它在哈密顿力学中有着重要的应用,可以用于描述物理系统的演化、约束和守恒规律等方面。在量子力学中,泊松括号被泛化为泊松括号算符,用于描述量子力学中的相互作用关系。
- 正则变量是理论力学中的一种量度方法,它的主要性质包括:
- 独立的:正则变量中的每个变量是相互独立
- 完备的:正则变量组成的集合是完备
泊松括号和泊松定理
- A B均是正则变量
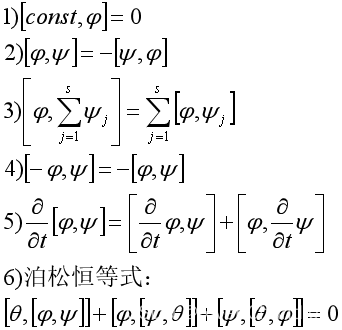
- 泊松括号的基本性质
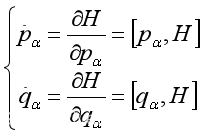
泊松括号改写正则方程
- 用泊松括号改写正则方程
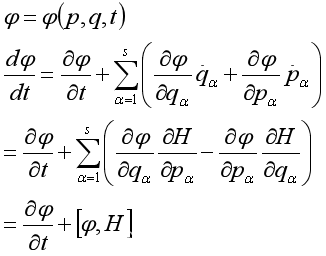
- 用泊松括号表示任意函数的微商
泊松定理
泊松定理的内容
如果已知两个运动积分:
![]()
存在第三个运动积分:
![]()
泊松定理的局限性
利用泊松定理,可以帮我们寻找新的运动积分。但实际上,它常常只能给出原有积分的线性组合或者恒等式,不能提供新的积分。例如:
- 理论力学中的泊松括号是一种运算符,用于描述相空间量的变化率。具体来说,泊松括号是一种双线性、反对称、满足雅可比恒等式的运算符,用于描述两个相空间量之间的变化率。泊松括号在描述诸如质点、力学系统、波动方程等物理现象中非常有用,并且也在数学上有广泛的应用。在哈密顿力学中,泊松括号经常被用于描述相空间函数的运动方程,它的重要性不言而喻。
Python 中的泊松括号
import sympy
from sympy import symbols
from sympy import diff
def poisson_bracket(f, g, x, p):
dfdx = diff(f, x)
dgdp = diff(g, p)
dfdp = diff(f, p)
dgdx = diff(g, x)
return dfdx * dgdp - dfdp * dgdx
x, p = symbols('x p')
f = x ** 2 + p ** 2
g = x * p
result = poisson_bracket(f, g, x, p)
print(result)
water 一下:
泊松
- 物理学家泊松是法国数学家、物理学家、天文学家和概率论家。他为社会提出了许多重大贡献,其中包括提出了今天称为“泊松分布”和“泊松方程”的概念。
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
import scipy.sparse as ss
from scipy.sparse.linalg import spsolve
class PDE2DModel:
#均应该传入一个一维二元数组,表示起止值
def __init__(self,x,y):
assert len(x)==len(y)==2,"ERROR:UNEXPECTED SV and EV!!"
self.x = x
self.y = y
#hx表示X上的步长
#hy表示Y上的步长
def space_grid(self,hx,hy):
M = int(round((self.x[1]-self.x[0])/hx,0))
N = int(round((self.y[1]-self.y[0])/hy,0))
assert M==N>=3,"至少网格数是合理的"
X = np.linspace(self.x[0],self.x[1],M+1)
Y = np.linspace(self.y[0],self.y[1],N+1)
return M,N,X,Y
def f(self,X,Y):
return 6*X*Y**3+6*X**3*Y+np.e**X*np.sin(Y)-np.e**X*np.sin(Y)
def solution(self,X,Y):
return np.e**X*np.sin(Y)-X**3*Y**3
#左边界
def left(self,Y):
return np.sin(Y)
#右边界
def right(self,Y):
return np.e**3*np.sin(Y)-27*Y**3
#上边界
def up(self,X):
return np.sin(1)*np.e**X-X**3
#下边界
def down(self,X):
return 0*X
#解算核心
def NDM5_2D(PDE2DModel,hx,hy):
M,N,X0,Y0 = PDE2DModel.space_grid(hx,hy)
Y,X = np.meshgrid(Y0,X0)
## print("X0",X0)
## print("Y0",Y0)
## #数值结果保存在U中 从0到N共N+1个
## print("M",M)
## print("N",N)
U = np.zeros((M+1,N+1))
U[0,:] = PDE2DModel.left(Y0)
U[-1,:] = PDE2DModel.right(Y0)
U[:,0] = PDE2DModel.down(X0)
U[:,-1] = PDE2DModel.up(X0)
D = np.diag([-1/(hy**2) for i in range(M-1)])
C = np.zeros((N-1,N-1),dtype="float64")
for i in range(N-1):
C[i][i] = 2*(1/hx**2+1/hy**2)
if i<N-2:
C[i][i+1] = -1/hx**2
C[i+1][i] = -1/hx**2
u0 = np.array([[PDE2DModel.down(X0[i])] for i in range(1,M)])
un = np.array([[PDE2DModel.up(X0[i])] for i in range(1,M)])
F = np.zeros((M-1)*(N-1))
for j in range(1,N):
#for i in range(1,M):
F[(N-1)*(j-1):(N-1)*(j)] = PDE2DModel.f(X0[1:M],np.array([Y0[j] for i in range(N-1)]))
F[(N-1)*(j-1)] += PDE2DModel.left(Y0[j])/hx**2
F[(N-1)*(j)-1] += PDE2DModel.right(Y0[j])/hx**2
F[:N-1] -= np.dot(D,u0).T[0]
F[(M-1)*(N-2):] -= np.dot(D,un).T[0]
F = np.mat(F).T
## print(F)
Dnew = np.zeros(((M-1)*(N-1),(N-1)*(M-1)))
for i in range((N-1)*(N-1)):
Dnew[i][i] = 2*(1/hx**2+1/hy**2)
if i<(N-2)*(N-1):
Dnew[i][i+N-1] = -1/hy**2
Dnew[i+N-1][i] = -1/hy**2
for i in range(N-1):
for j in range(N-2):
Dnew[(N-1)*i+j][(N-1)*i+j+1] = -1/hx**2
Dnew[(N-1)*i+j+1][(N-1)*i+j] = -1/hx**2
print("差分方程构造完成!解算开始!")
Unew = np.linalg.solve(Dnew,F)
#print(Unew)
U[1:-1,1:-1] = Unew[:,0].reshape((N-1,N-1)).T
return X,Y,U
#数据可视化
def Visualized():
x = np.array([0,3])
y = np.array([0,1])
pde = PDE2DModel(x,y)
X,Y,U = NDM5_2D(pde,0.03,0.01)
u = pde.solution(X,Y)
print("解算完成!绘图已开始!")
plt.figure(figsize=(15,5))
ax1 = plt.subplot(131,projection="3d")
ax2 = plt.subplot(132,projection="3d")
ax3 = plt.subplot(133,projection="3d")
ax1.set_title("Numeric Solution")
ax1.set_xlabel("x")
ax1.set_ylabel("y")
ax1.plot_surface(X,Y,U,cmap="gist_ncar")
ax2.set_title("Exact Solution")
ax2.set_xlabel("x")
ax2.set_ylabel("y")
ax2.plot_surface(X,Y,u,cmap="gist_ncar")
e = np.abs(U-u)
ax3.set_title("Error")
ax3.set_xlabel("x")
ax3.set_ylabel("y")
ax3.plot_surface(X,Y,e,cmap="gist_ncar")
plt.show()
return U,u,X,Y
U,u,X,Y = Visualized()

















 689
689

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











