




 本文介绍了如何使用RobotStudio的自动路径功能,根据3D模型自动生成激光切割的机器人运动轨迹。通过导入项目模型,选择表面边界生成加工面曲线,创建工件坐标,并设置运动指令,实现高效精准的轨迹生成。在实际应用中,建议以定位销为基准创建用户坐标系以提高定位精度。自动路径参数设置包括线性、圆弧运动、常量、反转和参照面等,同时通过调整目标点姿态和轴配置参数,确保机器人能准确按照路径运行。最后,设置加工起点和终点,完成程序并进行仿真运行,验证路径的正确性和效率。
本文介绍了如何使用RobotStudio的自动路径功能,根据3D模型自动生成激光切割的机器人运动轨迹。通过导入项目模型,选择表面边界生成加工面曲线,创建工件坐标,并设置运动指令,实现高效精准的轨迹生成。在实际应用中,建议以定位销为基准创建用户坐标系以提高定位精度。自动路径参数设置包括线性、圆弧运动、常量、反转和参照面等,同时通过调整目标点姿态和轴配置参数,确保机器人能准确按照路径运行。最后,设置加工起点和终点,完成程序并进行仿真运行,验证路径的正确性和效率。
自动路径功能
在工业机器人轨迹应用过程中,如切割,涂胶,焊接等,常会需要处理一些不规则曲线,通常的做法是采用描点法,即根据工艺精度要求去示教想要数量的目标点,从而生成机器人的轨迹,此种方法费时费力且轨迹精度不高,图形化编程即根据3D模型的曲线调整自动转换成机器人的运动轨迹,此种方法省时省力且精度高,本文中就根据三维模型的曲线特征,如何利用RobotStudio自动路径功能自动生成激光切割的运动轨迹路径
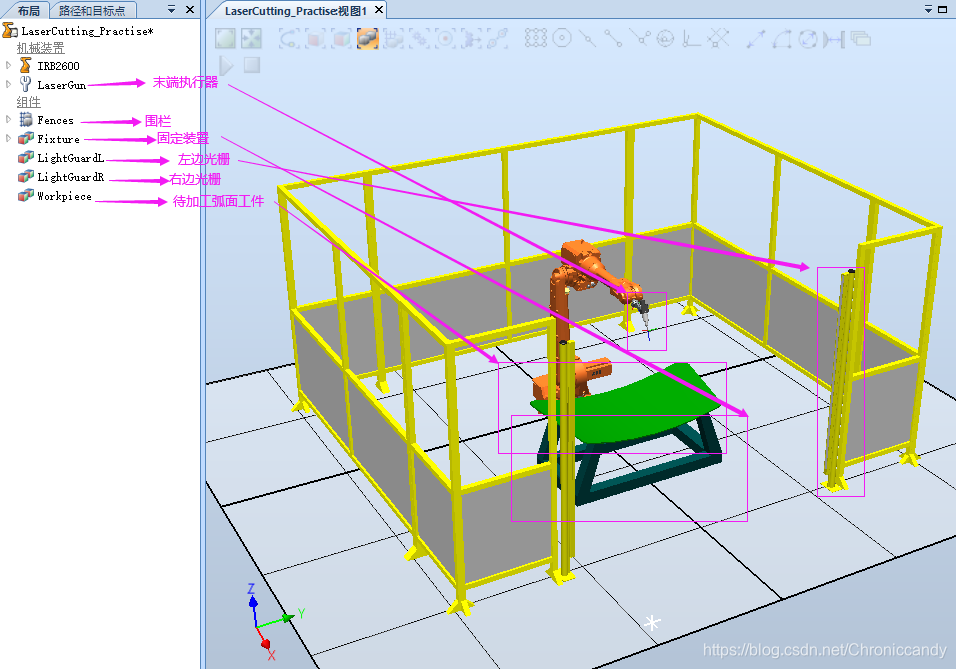
导入项目模型
在本文中我们一个多个弧面的待加工件需要进行激光切割处理,机器人需要沿着工件外边缘进行切割,在运动轨迹为3D曲线,我们可以利用自动路径功能对待加工件的3D模型进行处理,直接生成机器人运行轨迹,从而完成整个轨迹调试并模拟仿真运行,其操作过程如下
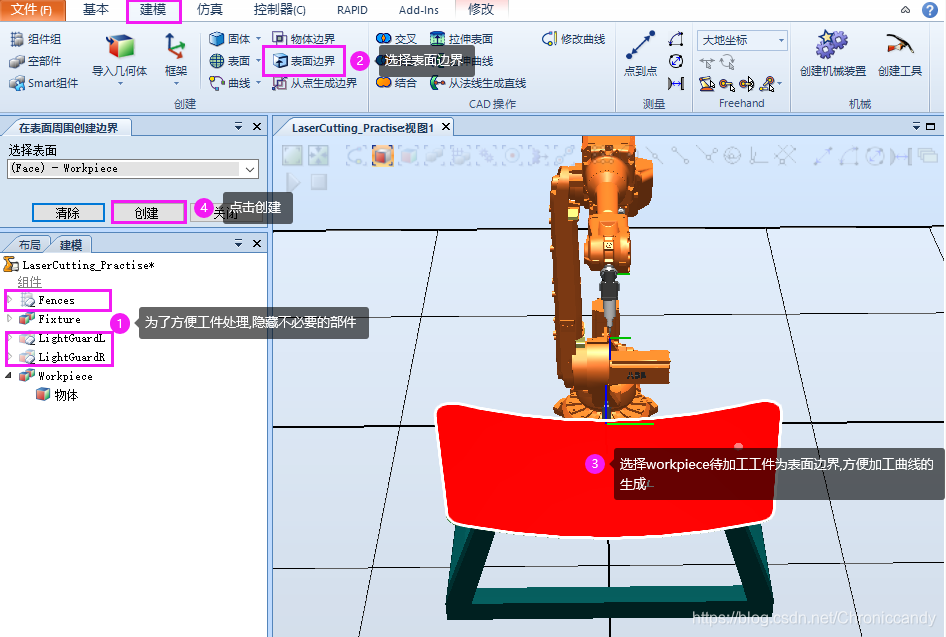
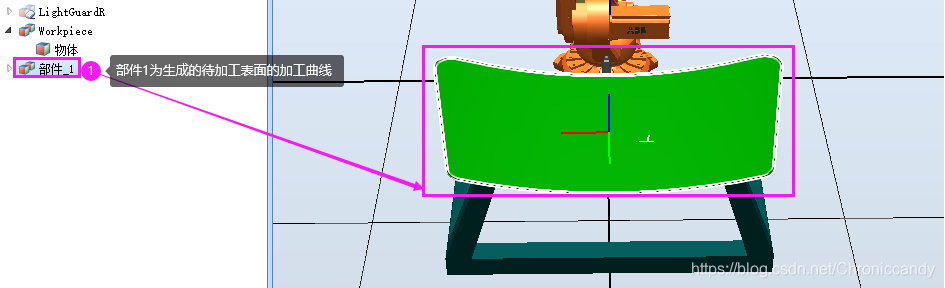
选择表面边界生成加工面曲线
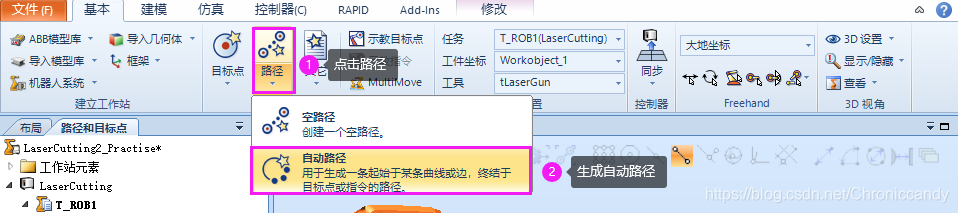
建立自动路径
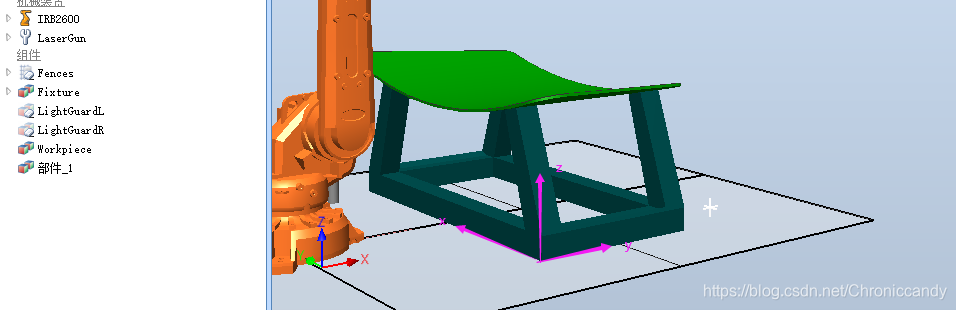
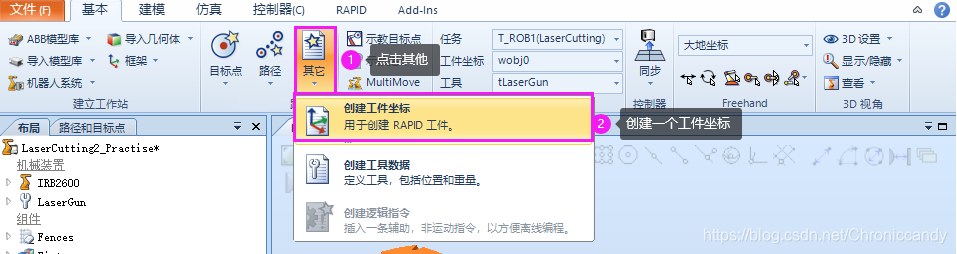
创建工件坐标(用户坐标系)
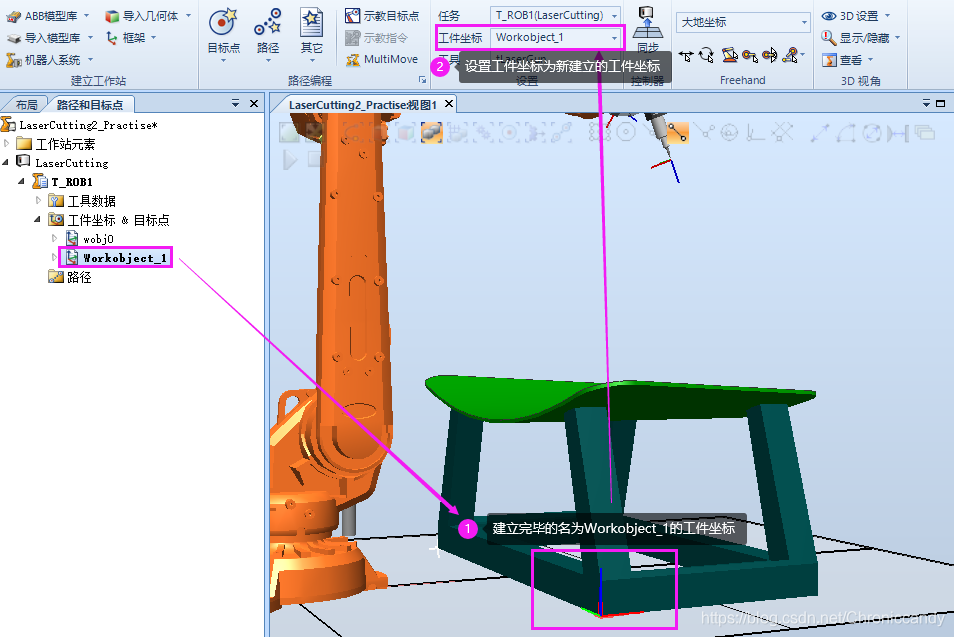
有了生成待加工件表面的加工曲线,我们就可以根据3D曲线自动生成机器人的运行轨迹,在生成自动轨迹的过程中,通常需要创建用户坐标系以方便进行编程以及路径修改,用户坐标系的创建一般以加工工件的固定装置的特征点为基准,在本任务中,我们创建一个位于固定工具底部的用户坐标系
注意:在实际应用过程中,固定装置上面一般设有定位销,用于保证待加工工件于固定装置之间的相对位置精度,所以在实际应用的过程中,建议以定位销为基准来创建用户坐标系,这样就更容易保证其定位精度
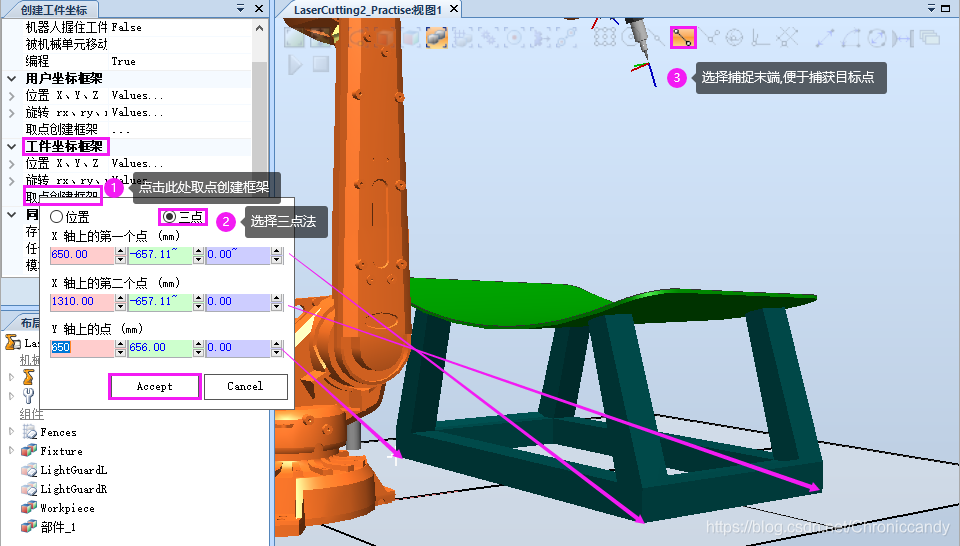
即将创建的待加工工件的固定装置底部特征为基准的工件坐标:
使用三点法创建工件坐标框架:
创建自动路径
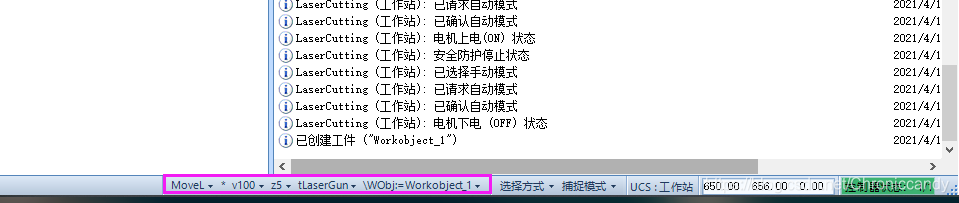
设置运动指令:
生成自动路径:
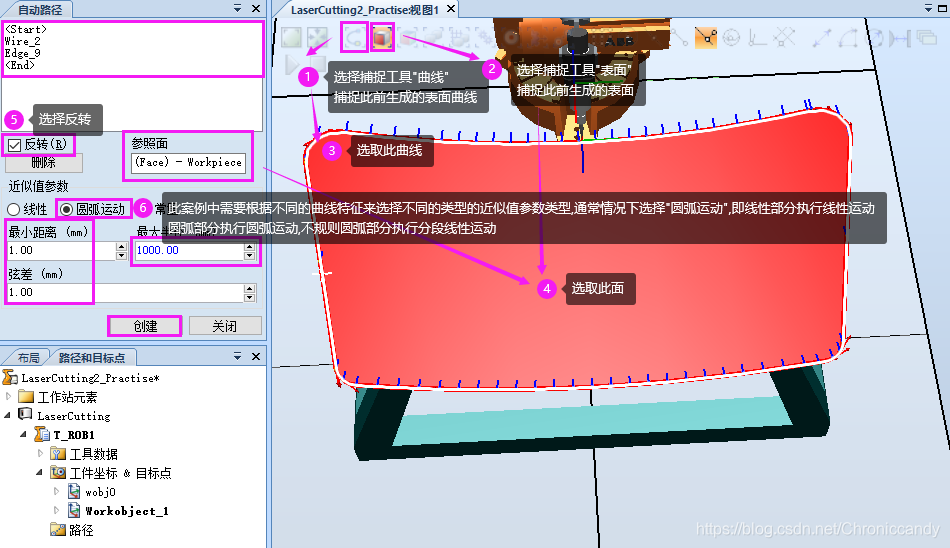
关于自动路径设置时的参数说明:
| 选项 | 用途说明 |
|---|---|
| 线性 | 为每个目标点生成线性指令,圆弧部分目标点作分段线性处理 |
| 圆弧运动 | 在圆弧部分目标点处生成圆弧指令,在线性部分目标点处生成线性指令 |
| 常量 | 生成具有恒定间隔距离的点 |
| 反转 | 轨迹方向置反,默认为顺时针运行,反转后则为逆时针运行 |
| 参照面 | 生成的目标点Z轴方向与选定表面处于处垂直状态 |
| 属性值 | 用途说明 |
| 最小距离/mm | 设置两生成点之间的最小距离,即小于该最小距离的点将被过滤掉 |
| 最大半径/mm | 在将圆弧时为直线前确定圆的半径大,直线视为直径无限大的圆 |
| 弦差 | 设置生成点所允许的几何描述的最大偏差 |
自动路径目标点调整以及轴配置参数
全选路径下的目标点并查看目标处工具:
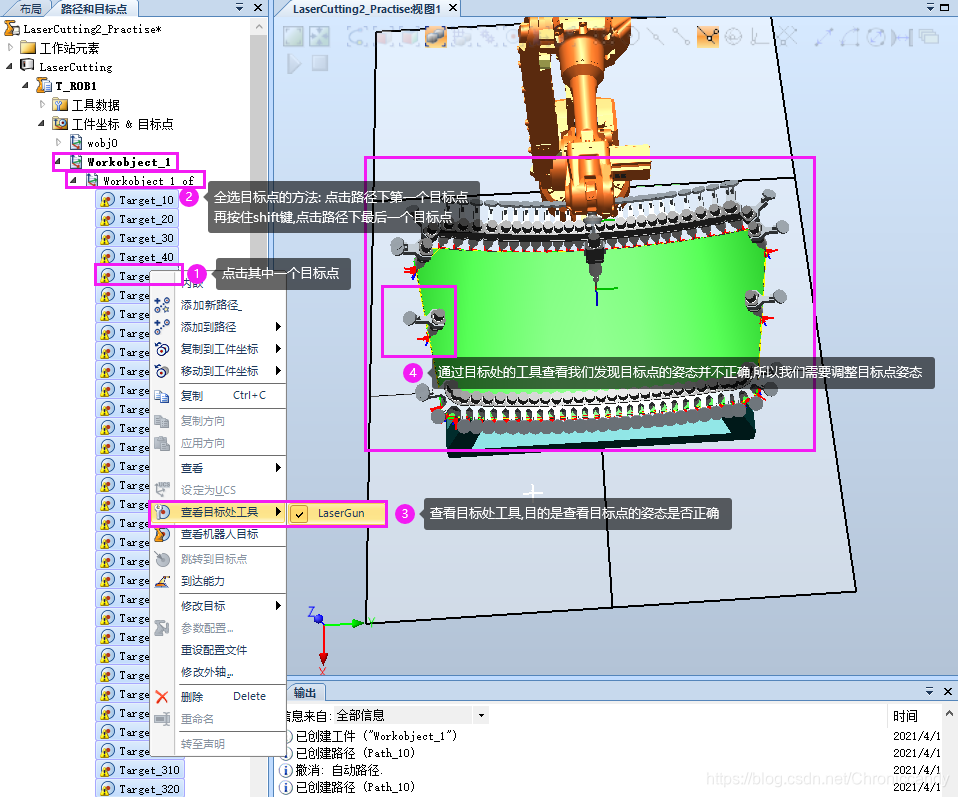
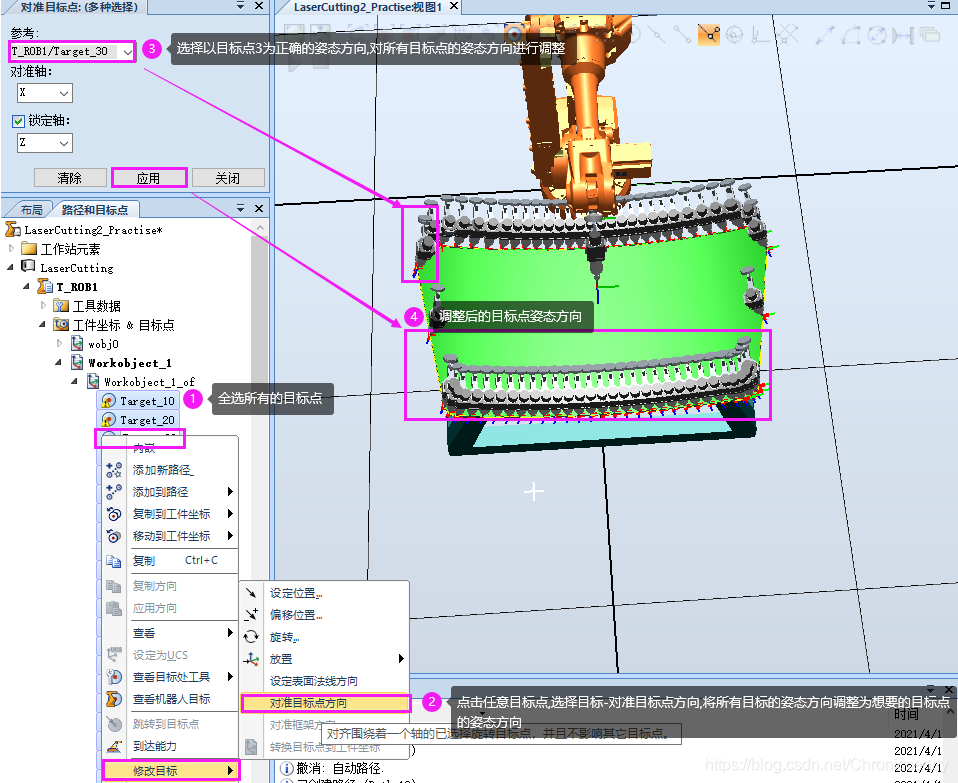
初步调整目标点姿态:
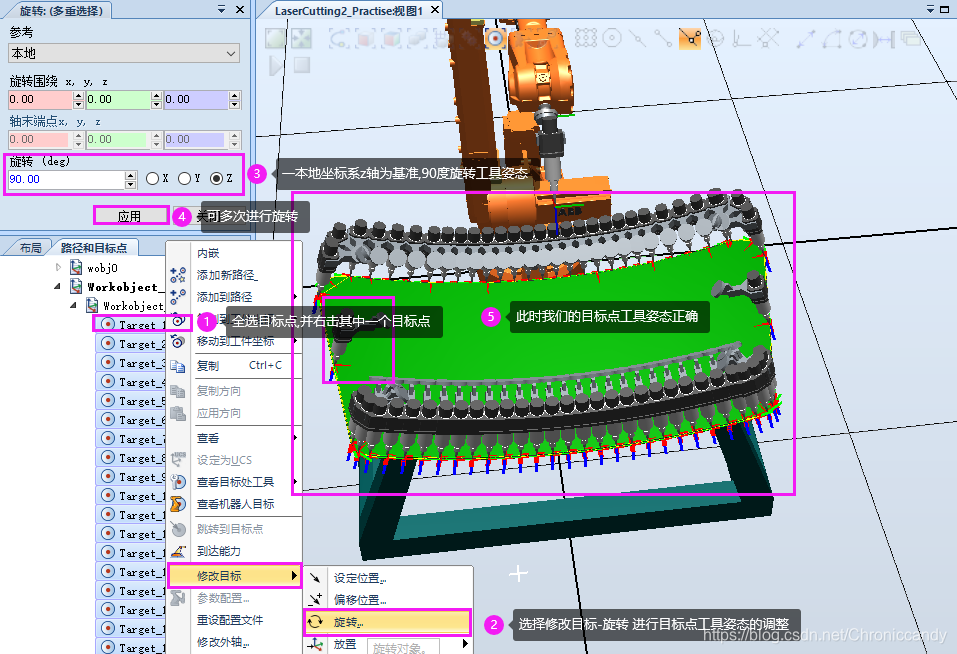
调整目标点姿态方向(可以不进行调整,本案例中略过):
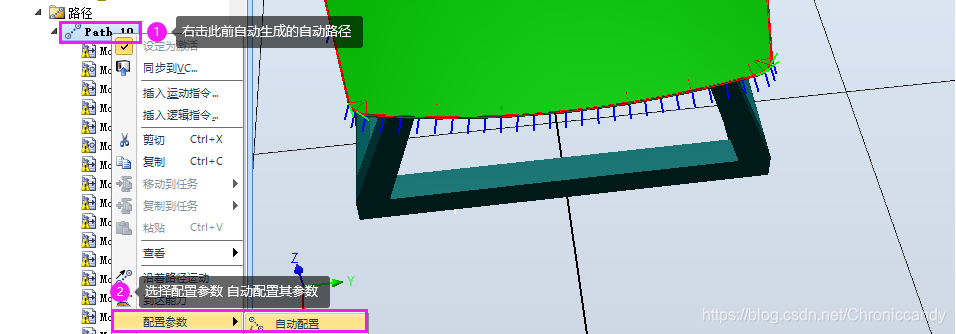
自动调整轴配置参数:
此前因为没有配置轴配置参数,路径下的各个目标点均为配置参数未认证状态,此时机器人不能依照路径进行运动

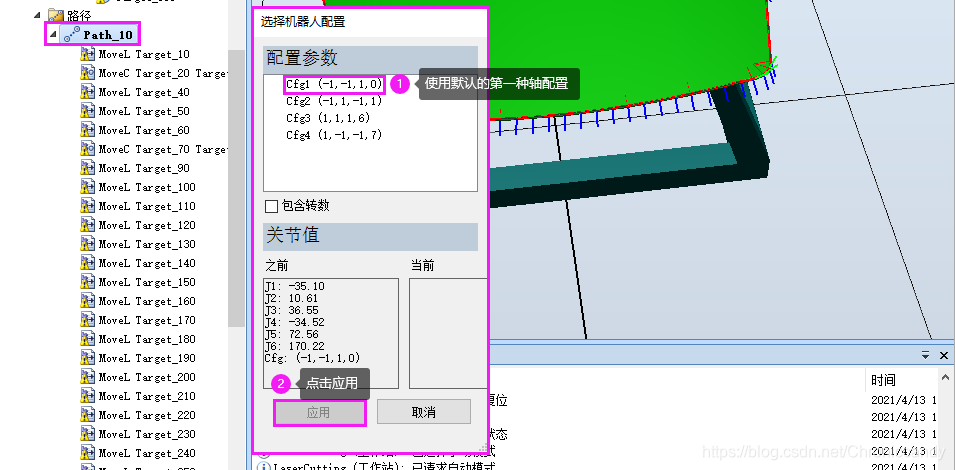
在自动生成的路径属性中,我们可以为所有目标点自动调整轴配置参数,自动配置参数之后.机器人为各个目标点自动匹配轴配置参数,然后让机器人按照运动指令运行,机器人此时便可以依照路径进行运动
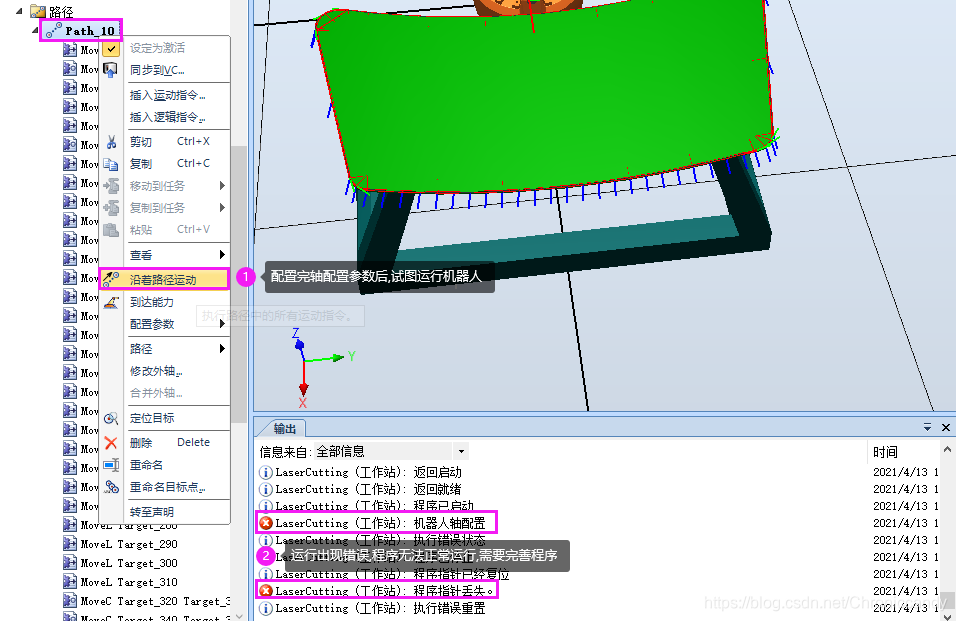
配置完轴配置之后,让机器人按照路径进行运动,结果如下:
完善程序并仿真运行
设置机器人加工起点(pa)和终点(pb)和机器人坐标原点(start):
机器人沿着路径运行:
机器人仿真运行:

















 1453
1453

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









