







为什么需要设定工具的本地原点
由于用户自定义的3D模型由不同的3D绘图软件绘制而成,并转换成特定的文件格式,此时将3D模型导入到RobotStudio软件中便会出现图形特征丢失的情况(即图形没有了坐标点,无法进行图形之间的配合使用),在本任务中将特意选取一个缺失图形特性的工具模型,在创建的过程中我们会遇到类似的问题
下面我们介绍针对此类问题的解决方案,即导入一个外部的末端执行器模型,且设定此末端执行器的本地原点,使其具有和系统库里默认的工具同样的属性和图形特征,并将其安装在机器人末端上,且使用这个自定义的末端执行器工具完成工件表面待处理点位的定位
创建工具坐标系的过程一览:
创建新工具
导入几何体
选中几何体右键单击然后点击两点放置
设定本地原点
设定位置
再次设定位置
设定本地坐标
创建工具坐标系框架
建模
创建框架
设定为表面法线方向
设定位置
创建工具
安装工具
进行轨迹移动
设定工具的本地原点
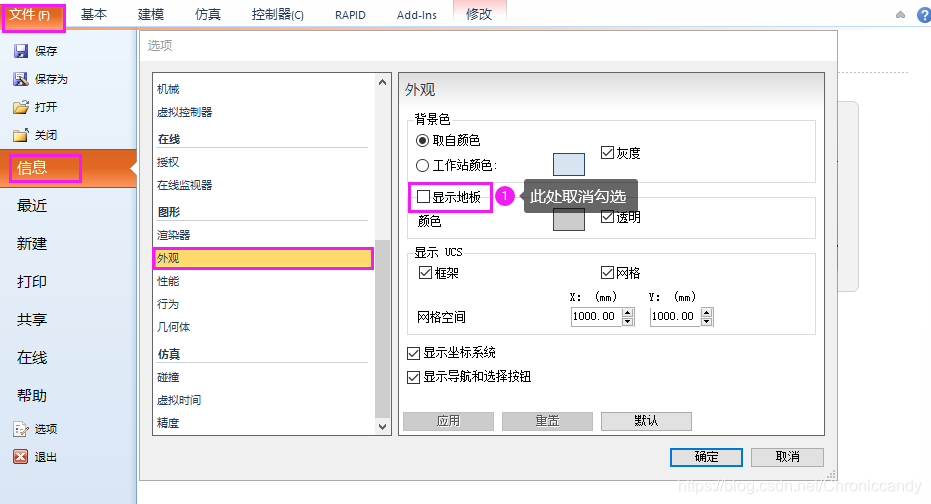
隐藏仿真环境地面
在图形处理的过程中,为了避免工作站地面特征影响视线以及捕捉,我们先将地面设定为隐藏
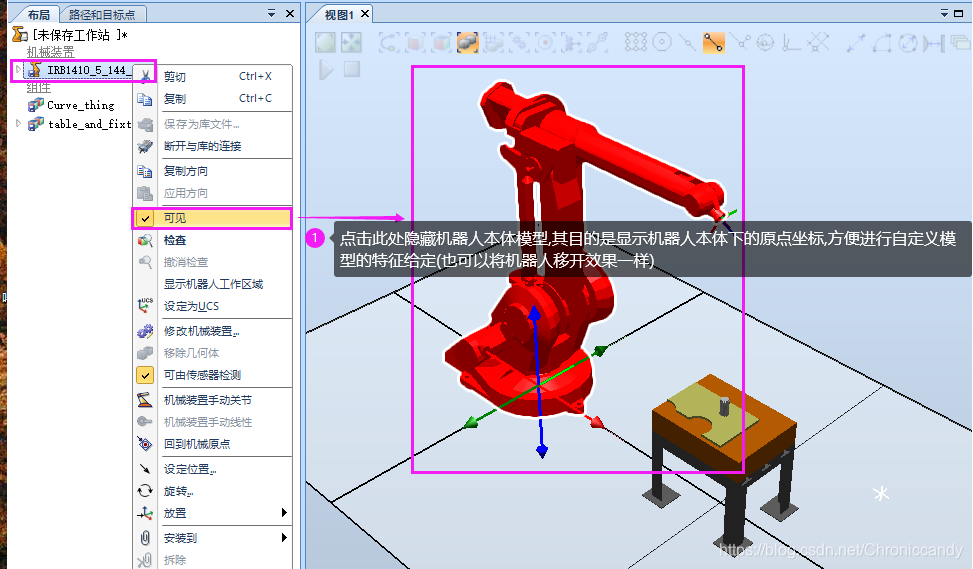
配置一个机器人基础环境并隐藏机器人本体模型
创建机器人系统
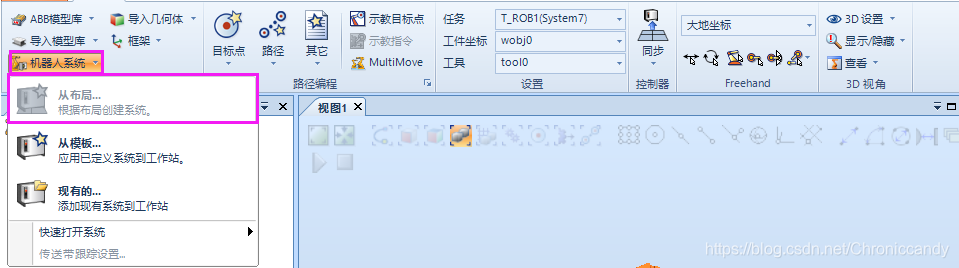
注意:从布局创建机器人系统的时候,一定要保证布局中的模型和集合体是已经具有图形特征和坐标系信息的几何体和模型,如果布局中存在没有图形特征的几何体(例如我们下方要导入的几何体),此时将无法成功创建机器人系统!
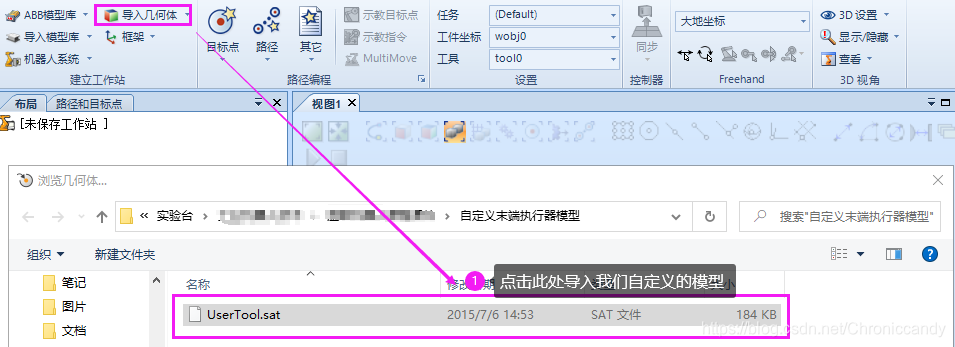
导入自定义的末端执行器模型
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









