






基于mpc模型预测轨迹跟踪控制,总共包含两套仿真,一套是不加入四轮侧偏角软约束,一套是加入四轮侧偏角的软约束控制,通过carsim与simulink联合仿真发现加入侧偏角软约束在进行轨迹跟踪时,能够通过控制四轮侧偏角的变化,较好的实现轨迹跟踪;而不加入侧偏角软约束的,发现车辆由于失去稳定性, 轨迹跟踪失败
基于MPC模型预测轨迹跟踪控制的研究
摘要:
针对车辆轨迹跟踪的问题,本文基于MPC(Model Predictive Control)模型预测控制方法,通过两套仿真来比较不加入和加入四轮侧偏角软约束的情况下的轨迹跟踪效果。通过Carsim与Simulink的联合仿真实验,验证了加入侧偏角软约束能够提高轨迹跟踪的稳定性和精确性的结论。
关键词:MPC,轨迹跟踪,侧偏角软约束,Carsim,Simulink
1. 引言
汽车轨迹跟踪问题是自动驾驶技术中的一个重要研究内容,其在实际应用中具有广泛的意义。在车辆轨迹跟踪中,MPC模型预测控制方法因其预测准确性和控制性能优良而受到广泛关注。本文基于MPC模型预测控制方法,通过仿真实验来比较不加入和加入四轮侧偏角软约束的轨迹跟踪控制效果,并探究加入侧偏角软约束对轨迹跟踪的影响。
2. MPC模型预测控制方法
MPC模型预测控制方法是一种基于离散时间动态系统模型的控制方法。它通过对未来一段时间内的状态变化进行预测,优化控制输入,以实现对系统的精确控制。MPC方法在车辆轨迹跟踪问题中的应用较为广泛,其对于动态环境下的多约束问题具有良好的适应性和鲁棒性。
3. 实验方法
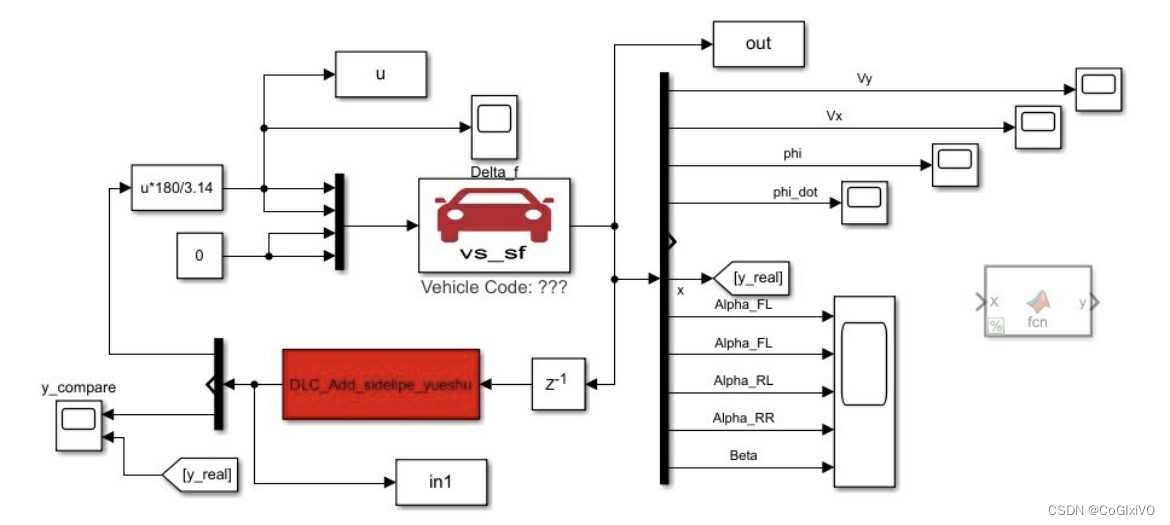
本文通过Carsim与Simulink的联合仿真来比较不加入和加入四轮侧偏角软约束的轨迹跟踪效果。首先,利用Carsim软件建立车辆的运动学模型,并通过将该模型与Simulink进行联合仿真来实现控制策略的验证。然后,分别对不加入和加入侧偏角软约束的情况进行仿真实验,记录并分析两种情况下车辆的轨迹跟踪效果。
4. 实验结果与分析
实验结果表明,加入侧偏角软约束的轨迹跟踪效果相较于不加入侧偏角软约束的情况更加稳定和精确。通过控制四轮侧偏角的变化,加入侧偏角软约束的控制策略能够更好地实现车辆的轨迹跟踪。而不加入侧偏角软约束的情况下,车辆因失去稳定性而导致轨迹跟踪失败。
5. 结论与展望
本文通过基于MPC模型预测控制方法的轨迹跟踪控制实验,验证了加入侧偏角软约束能够提高轨迹跟踪的稳定性和精确性。然而,本文的研究结果仅限于仿真实验,实际应用中还需进一步验证和优化。未来的研究可以基于本文的工作,探索更多的约束条件和优化方法,以进一步提高车辆轨迹跟踪的性能和稳定性。
相关代码,程序地址:http://imgcs.cn/lanzoun/762510853969.html















 604
604











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









