







 本文详细介绍了某B级车型的四分之一悬架参数,包括簧载质量和非簧载质量,以及悬架和轮胎的刚度。探讨了二自由度半主动悬架的动力学模型,基于牛顿第二定律,构建了动力学表达式,并展示了在Simulink中的实现。研究焦点在于智能优化的滑模控制在半主动悬架中的应用。
本文详细介绍了某B级车型的四分之一悬架参数,包括簧载质量和非簧载质量,以及悬架和轮胎的刚度。探讨了二自由度半主动悬架的动力学模型,基于牛顿第二定律,构建了动力学表达式,并展示了在Simulink中的实现。研究焦点在于智能优化的滑模控制在半主动悬架中的应用。
某 B 级车型的四分之一悬架参数如表所示:
| 参数名称 | 符号 | 数值 | 单位 |
|---|---|---|---|
| 簧载质量 | m s m_s ms | 340 | kg |
| 非簧载质量 | m u m_u mu | 45 | kg |
| 悬架刚度 | k s k_s ks | 19500 | N/m |
| 轮胎刚度 | k t k_t kt | 200000 | N/m |
| 最大阻尼系数 | c m a x c_{max} cmax | 3800 | N ⋅ \cdot ⋅s/m |
| 最小阻尼系数 | c m i n c_{min} cmin | 1000 | N ⋅ \cdot ⋅s/m |
| 被动阻尼系数 | c 0 c_0 c0 | 2000 | N ⋅ \cdot ⋅s/m |
二自由度悬架模型的建立有前提条件:
- 只考虑车辆受到路面激励后的垂直运动;
- 悬架刚度以及轮胎刚度为定值;
- 忽略轮胎阻尼,车辆在行驶过程中,轮胎与路面始终保持良好的接触条件。
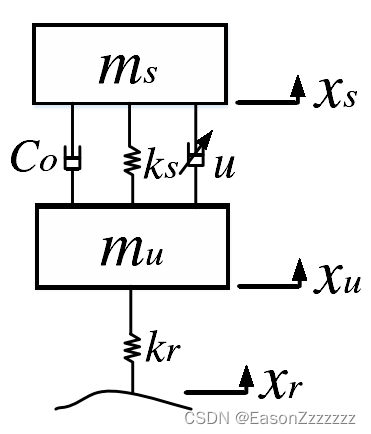
二自由度半主动悬架模型的基本结构如下图所示,图中
m
s
m_s
ms 代表簧载质量(主要包括车身以及底盘),
m
u
m_u
mu 代表非簧载质量(包括车轮以及制动、转向系统),
x
s
x_s
xs 代表车身位移,
x
u
x_u
xu 代表非簧载质量位移,
x
r
x_r
xr 代表路面激励位移,
C
0
C_0
C0 代表原车阻尼系数,
k
s
k_s
ks 代表悬架刚度,
k
r
k_r
kr 代表轮胎刚度,
u
u
u 代表半主动悬架阻尼力。
选取悬架各系统变量的静平衡位置为坐标原点,根据牛顿第二定律,二自由度悬架模型的动力学表达式为:
{
m
s
x
¨
s
+
c
0
(
x
˙
s
−
x
˙
u
)
+
k
s
(
x
s
−
x
u
)
−
u
=
0
m
u
x
¨
u
−
c
0
(
x
˙
s
−
x
˙
u
)
−
k
s
(
x
s
−
x
u
)
+
k
r
(
x
u
−
x
r
)
+
u
=
0
\begin{cases} m_s\ddot x_s + c_0(\dot x_s-\dot x_u) + k_s(x_s-x_u) - u = 0\\ m_u\ddot x_u - c_0(\dot x_s-\dot x_u) - k_s(x_s-x_u) + k_r(x_u-x_r) + u = 0 \end{cases}
{msx¨s+c0(x˙s−x˙u)+ks(xs−xu)−u=0mux¨u−c0(x˙s−x˙u)−ks(xs−xu)+kr(xu−xr)+u=0
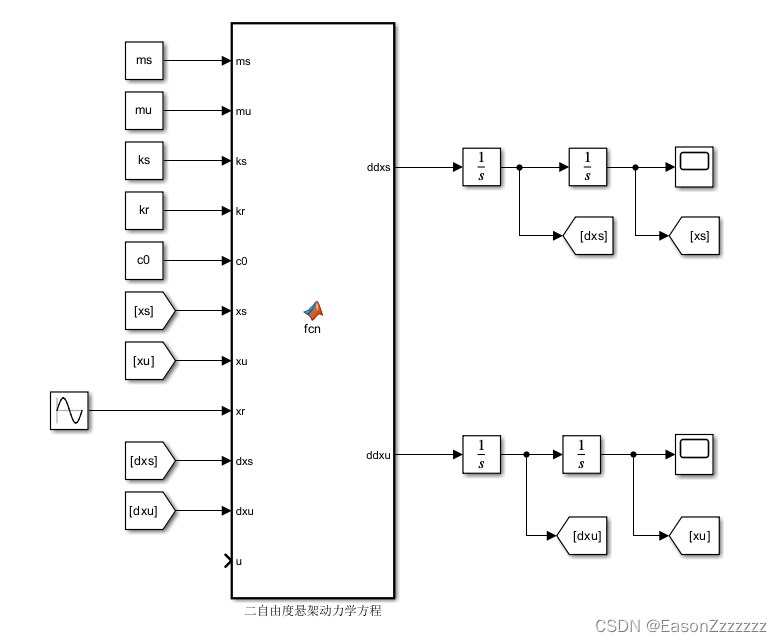
二自由度悬架动力学模型 Simulink 中的框图如下图所示:
[参考文献]:刘善辉.半主动悬架的智能优化滑模控制研究[D].吉林大学


















 1619
1619

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









