







IMU/陀螺仪角速度测量原理-科氏力测旋转角速度
科式力的引入
如图(a),我们假设有一个惯性系OXY,在OXY中的Or位置有一个质点,以速度v(惯性系OXY下的速度,方向为-Y)沿着-Y方向匀速运动。现在我们在Or位置放置一个以速度w(惯性系OXY下的速度)旋转的圆盘,并在圆盘上固联一个坐标系OrXrYr,称为旋转坐标系,即旋转坐标系OrXrYr以角速度w相对于惯性系OXY做旋转运动。
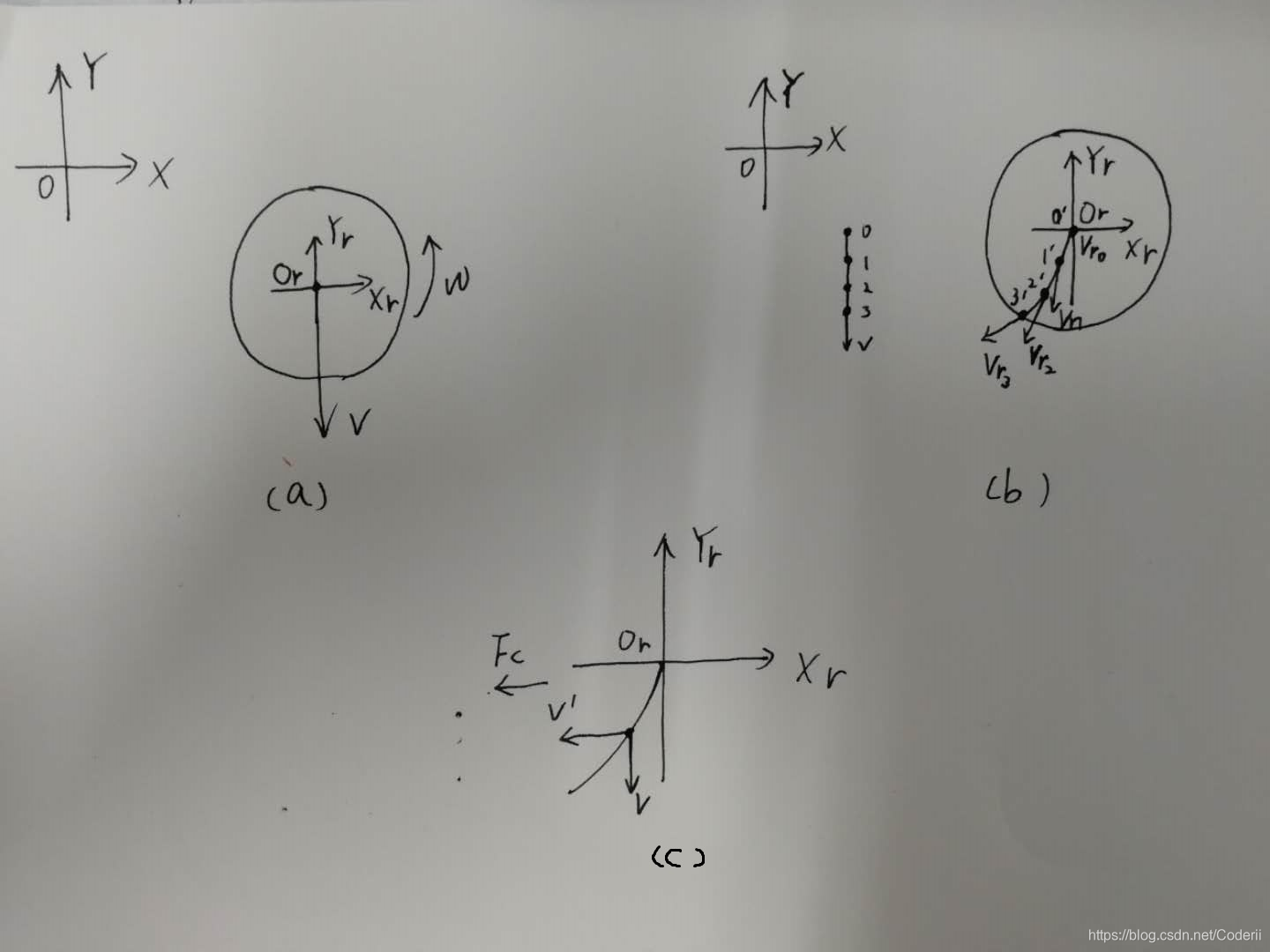
如图(b),此时在OXY下看质点的运动是轨迹0-1-2-3,在各点出的速度均是v。而在旋转坐标系OrXrYr下看质点的运动是轨迹0’-1’-2’-3’,在各点出的速度分别是vr0,vr1,vr2,vr3。可以看出在旋转坐标系视角下质点上有一个沿-Xr方向的速度分量v’,且该速度分量从0’到3’逐渐增大。因此可以认为在旋转坐标系视角下存在一个作用于质点上的力Fc,造成了v’,如图(c),使得轨迹0’-1’-2’-3’是一条曲线。这个力Fc就是科式力
这里要说明的是:
1,科式力Fc是在旋转坐标系下才能够被观测到的一个虚拟的力,在惯性坐标系下是不存在的。
2,科式力的计算公式是:Fc = 2m(v×w),其中m为质点的质量,其余符号定义如前所述。
通过科式力计算角速度的原理
陀螺仪的原理图如下图(d)所示:
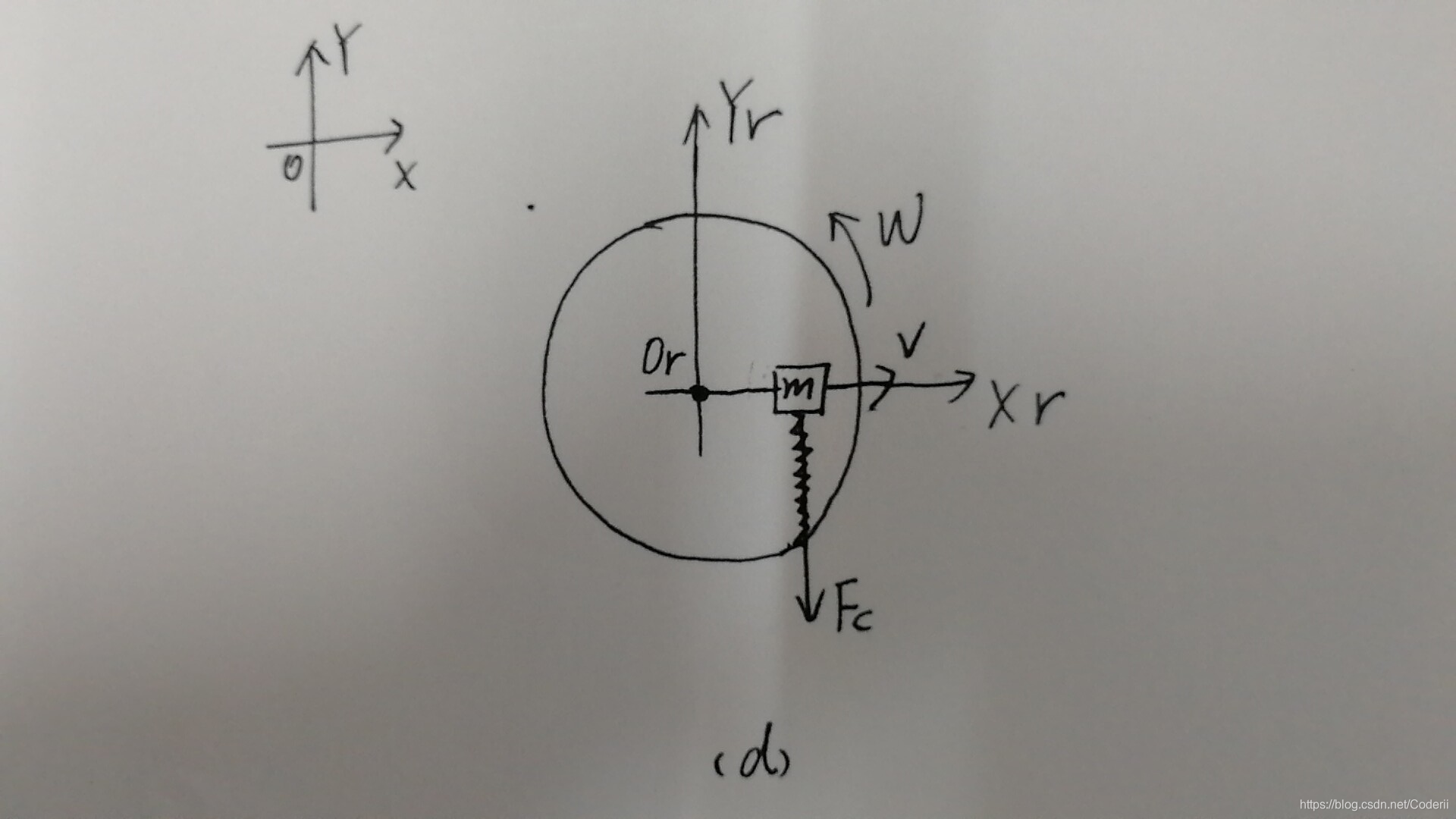
惯性系OXY是地球坐标系,旋转坐标系OrXrYr是固联在陀螺仪的外壳上的。在陀螺仪内部有一个质量块m,通过一个弹簧与陀螺仪的外壳连接。如果我们通过某种方式使质量块m具有沿X轴方向的速度Vx,假设其大小是v,于是当陀螺仪没有转动时m相对于旋转坐标系的速度用符号Vxr表示,其沿着Xr方向,大小也是v。
当陀螺仪以角速度w旋转时,如果没有通过弹簧固定m,那么m将会在科式力Fc的作用下相对于旋转坐标系产生除Vxr以外的速度,自然,该速度将会产生沿Fc方向的位移。
但是由于弹簧的存在,弹簧受到挤压后将给m一个与Fc大小相等的力,从而消除了科式力产生的加速度(旋转坐标系视角下),消除了进而产生的速度(旋转坐标系视角下),于是此时质量块相在旋转坐标系视角下就只有沿Xr轴的速度Vxr,大小为v,下面说明直接用v来代替。
而在弹簧处,我们可以测的Fc的大小,于是就凑齐了公式Fc = 2m(v×w)中的Fc,m,v,进而就可以计算w了
音叉震动原理
上面的计算方法无疑是正确的,但是有一个限制,就是陀螺仪本身(外壳)不能有加速度,即旋转坐标系本身不能够有相对于惯性系的线加速度。因为如果陀螺仪有线加速度a的话,那么弹簧不仅要为m提供一个力抵消科氏力,还要为m提供一个力使它也产生这个加速度,而我们能够直接测量的是这两个力的合力F,无法从中恢复出科氏力的大小。即公式应该变成:F = ma +2m(v×w).
解决办法是通过如图(e)所示的结构:
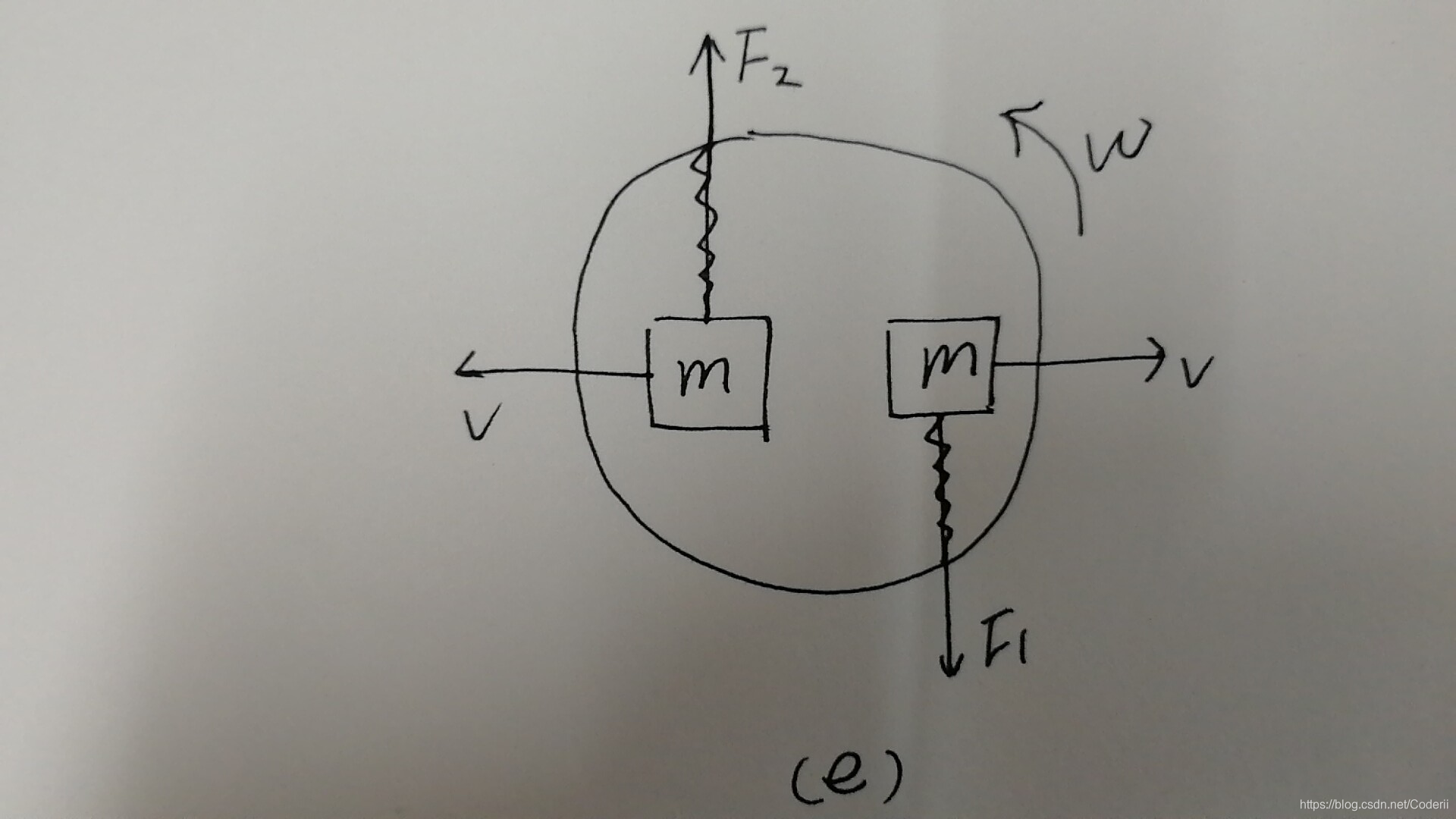 此时公式变成:
此时公式变成:
F1 = +ma +2m(v×w)
F2 = -ma +2m(v×w)
于是:
F1+F2 = 4m(v×w)就可以抵消掉a的影响,进而求解w了

















 3541
3541

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









