







编辑:CrazyRabbit
日期:2022年6月16日
本文主要讲一下车辆动力学如何入门,如何进阶,供想进入该领域的工程师参考。
本篇主要讲的是传统领域,不包含电控开发。
0. 前言
何为车辆动力学?
车辆动力学,英文为Vehicle Dynamics,俗称VD。我们可以先从猎聘上看一下,车辆动力学工程师的工作内容和职责。
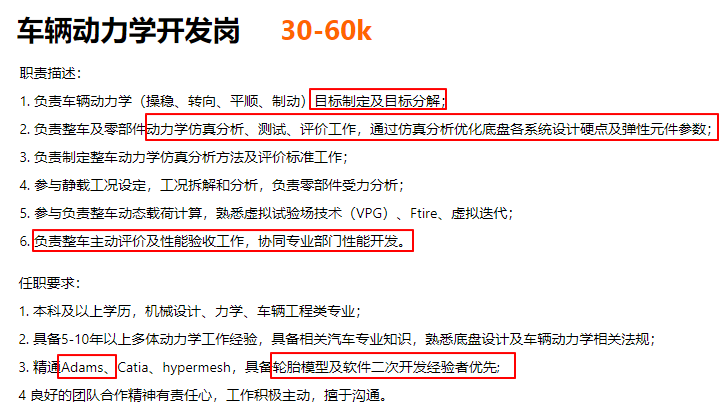
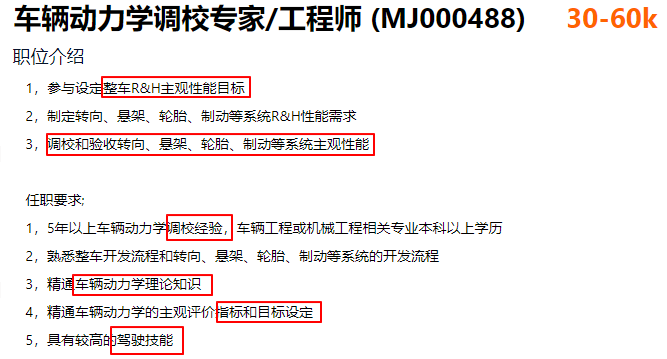
一般而言,车辆动力学大体上分为两个方向,上面的两个招聘简图分别对应这两个方向:
- 仿真设计:主要是用Adams-Car等车辆动力学仿真工具,以仿真的手段,完成车辆动力学性能的目标设定(通常是客观指标)、分解和达成
- 性能调校:通过实车评价,以底盘调校的方式,完成车辆动力学性能的目标设定(通常是主观指标)、分解和达成
工作职责
从上述图片看,无论是仿真方向还是调校方向,都涉及到几个关键词:
- 目标设定
- 目标分解
- 性能验收
任职要求
对于任职者的要求,都涉及到几个关键字:
- 车辆动力学理论
- 底盘零部件开发
对于偏仿真人员,强调精通Adams-Car等软件的使用;对于调校人员,强调较高的驾驶技能和评价能力。
1. 理论知识
无论是偏仿真,还是偏调校,车辆动力学的理论知识是所有工作的前提。本节介绍车辆动力学的理论基础如何入门。以个人的工作经验,涉及到车辆动力学的理论知识主要包含以下几个细分领域。
1.1 “纯”车辆动力学知识
什么叫“纯”车辆动力学知识呢,这是我个人的一个定义,没有这种官方的说法。我的解释是:
只需要很少的底盘结构或零部件的知识,所有东西都是抽象为数学模型的知识。这类知识大多是数学公式的推导。举个例子,《汽车理论》第五章,二自由度操稳模型,推导出了很多车辆动力学的关键结论(比如,不足转向度)。任何一个不懂底盘结构的工科学生都能看懂。
这种知识如何获取呢?
很简单,捡起一些最基础的工科数学(微积分、矩阵),然后直接看书即可。
涉及到“纯”车辆动力学的书多如牛毛,个人推荐入门只需要看两本(其实,不只是入门,进阶也是这两本书):
- 《汽车理论》,国内的教材一般饱受诟病,但这本书绝对是良心之作。这本书的特点是小而精。对于做底盘车辆动力学的人员,第四、五、六章(制动、操稳、平顺性)要倒背如流(不是背课文,是一些推导出来的结论要理解记忆)。这本书要反复看,不是一下子就能理解透彻的。
- 《Vehicle Handling Dynamics-Theory and Application》2nd,作者是【日】 俺不整人(安部正人),这本书只讲操稳,相当于《汽车理论》第五章的扩展。如果学习操稳的话,这本书足够了,这本书的特点是:
- 深入浅出,理论推导不是很难的那种,没有用太复杂的数学工具(但仍然比《汽车理论》难,如果看的困难,请捡起工科数学)
- 特别是有操稳二自由度模型基础上的扩展,比如考虑转向柔性,考虑侧倾,驱动制动等因素对操稳的影响
- 包含了一些电控的理论知识(后轮/四轮转向)
- 有大量仿真或实测的图
- 中文版当前有售
前期可以集中精力看这两本书,精力不足的话,仔细看第一本。两本书都吃透的话,基本上在VD工程师圈可以混得很开了,起码讨论理论问题会很有底气。
补充教材
如果上述教材满足不了你的胃口的话,以下教材供挑选:
- 《Fundamentals of Vehicle Dynamics》
- 作者是Thomas D.Gillespie,国际知名车辆动力学专家,CarSim软件公司(Mechanical Simulation Corporation)创始人
- 国内有翻译版《车辆动力学基础》,译者 赵六奇
- 该书有点老,可以看到一些理论当年的研究过程(一般后来的新书都把这些过程略去了,比如悬架偏频的设定,在这本书上讲的比较详细)
- 前半部分是“纯”动力学,后半部分是一些转向、悬架、轮胎的介绍
- 单位都是英制单位,看起来不太舒服
- 《Road Vehicle Dynamics-Fundamentals and Modeling with MATLAB》
- 如名字介绍,特点是将所有的理论都用MATLAB实现了一遍,想深入理解,自己把数学模型实际编程计算一遍是最有帮助的,对想编写理论计算小工具的工程师,个人很推荐
- 只有英文版
- 《Race Car Vehicle Dynamics》
- 俗称RCVD,当年大学生方程式的学生人手一本(其实没人仔细看)
- 跟《Fundamentals of Vehicle Dynamics》类似,是比较老的书,理论推导较少,更像是工程师看的书
- 单位也是英制,不舒服
- 只有英文版
- 《Tyre and Vehicle Dynamics》3rd
- 作者是魔术公式发明者Hans B.Pacejka
- 聚焦轮胎模型
- 建议翻阅,不建议细读,一般人读不下去。。。除非想专业研究轮胎
其他还有好多,国外VD的书多如牛毛,大多都类似,但也各有特色,个人感觉精度一两本,其他作为辅助即可。
1.2 K&C的知识
“纯”理论知识是车辆动力学的根基,但只掌握车辆动力学基础是不足以应对实际整车厂开发工作的(做学术研究应该够了),在“纯”理论知识的上层就是所谓的底盘K&C理论。
为什么K&C重要
客户/车型经理/性能集成团队/驾评人员需要的是整车的性能,底盘工程师开发的是底盘零部件。那么,中间就少了一个环节,谁来告诉底盘零部件工程师零部件的性能参数呢?这就涉及到一个从整车性能目标到零部件性能目标分解的过程。
那么,如何分解呢?比如,整车某个性能指标是前悬架偏频1.1Hz,那么根据这个指标能直接制定弹簧刚度吗?再比如,整车不足转向度是2.0deg/g,根据这个能直接制定轮胎侧偏刚度 吗?
答案是否定的。从整车的性能指标,到单独零部件的性能指标,是不可能一步跨越的,需要中间转换,起到转换作用的就是所谓的“KC指标”。
什么是K&C
K&C,具体通常说的是悬架KC特性,因为主要跟悬架相关(也涉及到部分转向)。K代表的意思是kinematic(运动学),C代表的意思是Compliance(柔性变形)。
所谓,K&C性能指标,指的是车辆(主要是轮胎)在受到外界输入后,悬架的某些指标的变化。这里的输入,主要分为两种,一种是运动输入,一种是力(力矩)的输入。而对于运动的输入,统称为K特性;对于力(力矩)的输入,统称为C特性。
例子
举一个例子,《汽车理论》第五章里二自由度车辆模型中,推导稳定性因子的时候,用到两个参数,分别是前/后的等效侧偏刚度。这个等效侧偏刚度,其实就是一个C指标。指的是,在轮胎受到单位侧向力的时候,车轮会产生一定的转向角。单位转向角对应的力,就是等效侧偏刚度。
等效侧偏刚度对车辆不足转向度有很大影响,根据不足转向度指标,可以设定前后等效侧偏刚度。而等效侧偏刚度这个C指标,与很多零件相关:
- 轮胎侧偏刚度
- 悬架各衬套的刚度
所以说,KC性能指标,起到了“桥梁”的作用。因为底盘的性能错综复杂,相互牵扯,从整车分解到KC,在从KC分解到零部件,才是相对有条理、科学的方法。
作为一名VD工程师,对于KC的理解,需要做到两个方面:
- 向上:KC指标对于整车性能有什么影响
- 向下:各零部件对KC指标有什么影响
如何获取K&C知识
对于K&C的知识,一般而言没有专门的书去系统讲,按我的学习和工作经验总结,推荐一些素材:
- 书本类
- 《汽车理论》第五章第四节“汽车操纵稳定性与悬架的关系”
- 《汽车运动性能技术》第四章“转向系统与车辆运动性能”,第五章“悬架与车辆的运动性能”
- 《The Automotive Chassis:Engineering Principles》第三章“Wheel travel and Elastokinematics”
- 论文类,知网搜索关键字“悬架KC”,“操纵稳定性”,“平顺性”,论文有很多,个人觉得不错的推荐两篇:
- 《基于操纵稳定性的汽车悬架稳健性设计研究》,作者景立新
- 《某微车悬架KC特性研究及其对整车操纵稳定性的影响》,作者王爽
- KC报告,找到某车型的KC报告,一页一页的翻看,每一页都问自己两个问题:这个KC性能对整车有什么影响,什么零部件影响这个KC性能
- KC试验台文档,有精力的可以研读MTS或ABD试验台的说明文档。
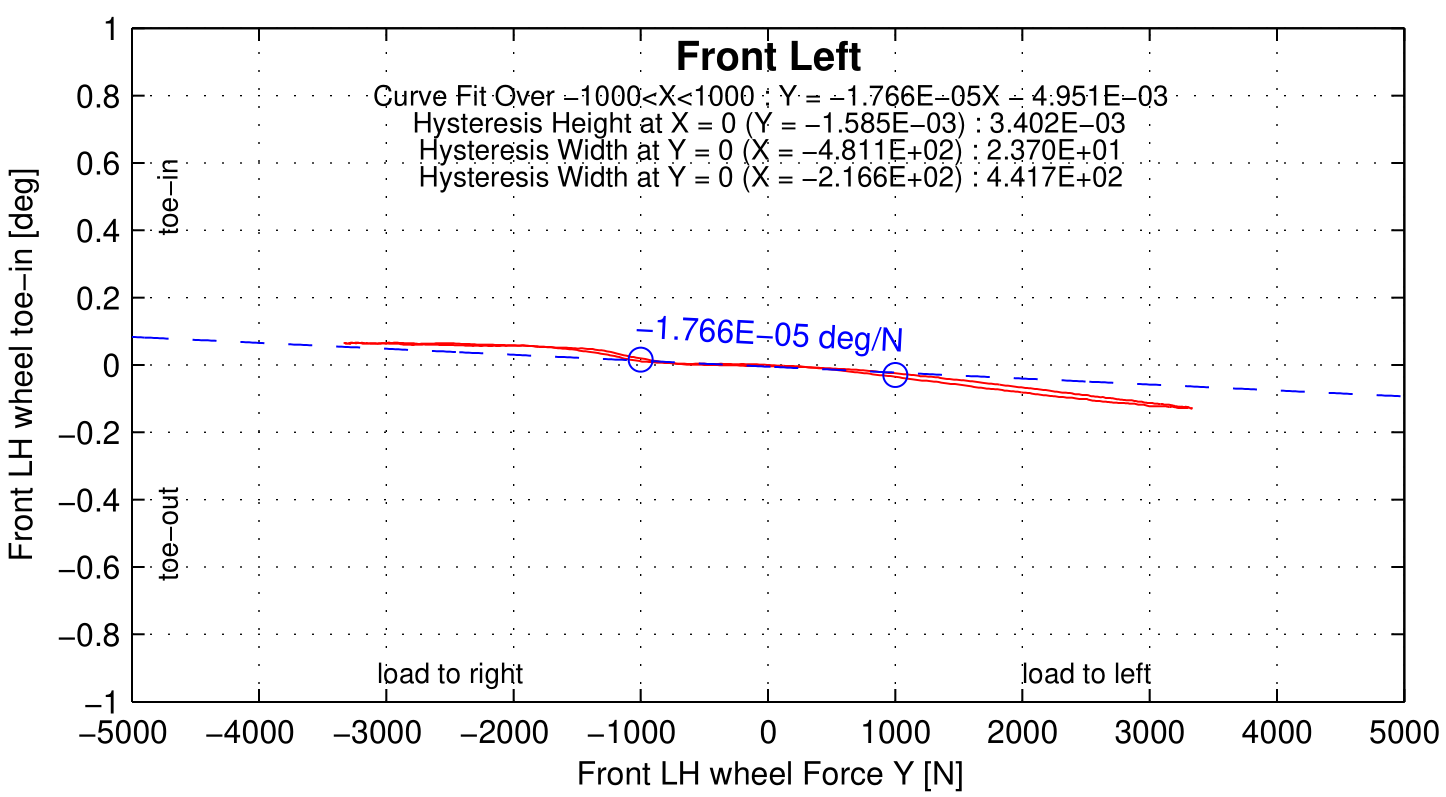
- 有能力的:拿到KC原始测量数据,自己写程序输出KC曲线
1.3 零部件的知识
K&C作为桥梁,联通了整车和零部件,如果VD工程师对零部件的性能也很了解的话,整个知识体系就会相对完善,也有助于在企业里与其他底盘同事交流。对于需要了解的零部件的知识,按重要性和难易程度排序进行说明:
1.3.1 轮胎
轮胎的性能是整个底盘性能的基础,不懂轮胎等价于不懂VD。
单纯做性能开发,不需要懂轮胎的生产工艺、加工制造、装配这些知识。知道一些基本常识即可,比如轮胎规格,花纹之类的。VD工程师需要知道的是,轮胎的力学特性。
最常见的,轮胎六分力及其常见指标,比如:侧偏刚度、垂向刚度等。入门的工程师,应该至少阅读一本系统介绍轮胎力学特性的书。由于轮胎太重要了,所以很多车辆动力学的理论书籍的第一章就是介绍轮胎力学基础的:
- 《The Automotive Chassis:Engineering Principles》,第二章“Tyre and Wheels”
- 我的资料《轮胎基础性能》
- 轮胎六分力报告,找一个轮胎六分力报告,将曲线特点背下来
对于做仿真的,还需要深入了解下轮胎模型,知道常见轮胎模型及其应用,有以下途径:
- Hans B.Pacejka的第一篇魔术公式的论文,将其看懂并写程序复现
- TNO公司官网,提供MF-Swift轮胎模型,可以去官网下载手册阅读
- cosin公司,提供F-Tire轮胎模型,可以去官网下载手册阅读
- 《汽车轮胎动力学》-郭院士的书,不解释
- 大把的轮胎模型的论文,吉大的较多
- ADAMS、CarSim等车辆动力学软件的轮胎相关帮助文档


1.3.2 减振器
底盘调校大部分时间都在调校减振器,减振器对车辆动态性能的影响较大。VD工程师应该至少了解减振器的结构及其原理。
推荐书籍:
- 《The Shock Absorber Handbook》,国内有译文,可翻阅,不适合认真看
- 《Chassis Handbook - Fundamentals, Driving Dynamics, Components, Mechatronics, Perspectives》相关章节
如果是做调校的,推荐书籍:
- 《Vehicle Dynamics and Damping》
1.3.3 衬套
衬套属于橡胶类元件,力学特性比较复杂,VD工程师也应该多少了解一下,基本的结构知识可以百度文库搜寻。VD工程师应该更关注橡胶这种材料的特点,特别是粘弹性、滞回曲线、高低频特性等,对车型的动态性能影响很大。如果想深入了解,推荐书籍:
- 《汽车悬架与橡胶弹性元件理论及设计》,翻阅即可
衬套跟轮胎一样,高精度动力学模型中,也是有模型和参数辨识的,想建高精度模型,可以研读一些相关论文。
1.3.4 其他零部件
其他的性能元件,如果想了解,可以找一本专门介绍底盘零部件的书,这里推荐《Chassis Handbook - Fundamentals, Driving Dynamics, Components, Mechatronics, Perspectives》相关章节。
其实,如果在企业,多跟零部件工程师沟通交流、研读该零部件的图纸是最快的学习方法。
2. 软件技能
作为偏理论设计的工程师,必备的软件技能是Adams-Car,可用于做悬架和整车的相关动力学仿真。如果涉及电控开发,CarSim+Simulink也是必备基础。本文只涉及传统的动力学开发,所以只谈Adams-Car。
软件只是工具,在使用工具前,一定要先补充理论知识。
学习资料
推荐书籍:
- 《MSC.ADAMS-技术与工程分析实例》,唯一一本讲Car模块的书籍
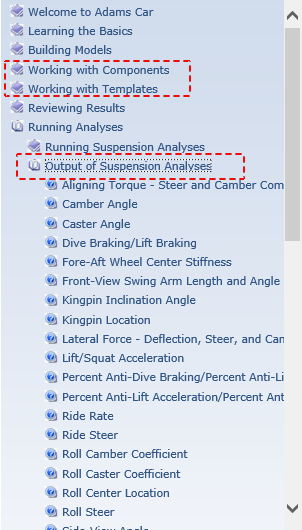
- 帮助文档,重点看“Output of Suspension Analysis”,K&C的知识都在这里;其次看“Working with Templates”和“Working with Components”,用于建模
学习路线,按照以下路线进行软件使用能力提升:
- 学会用自带的模板进行悬架仿真,对任一K&C指标都能进行后处理,输出曲线
- 学会自己建立模板,通常而言指的是悬架模板;学有余力的,请学会转向系统模板建立
- 学会整车模型搭建
- 整车仿真并做后处理
- 高级(精细化)建模
- 与其他软件(优化软件,控制软件)联仿
通常而言,1-2是入门,3-4是进阶,5-6是精通。
3. 客观测试
VD工程师不一定要会使用设备测试,负责测试工作,但要明白如何测试,熟悉测试标准,熟悉测试指标,具备处理测试数据的能力。特别是一些常见的客观指标,往往是车型性能开发的工程目标。
一般VD涉及到的性能测试分为以下三个:
3.1 操稳测试
至少要熟悉GB_T6323-2014《汽车操纵稳定性试验方法》,如果有资源,可以了解下ISO或国外车企的一些测试标准,一般都差异不大。常见的有:
- 转向瞬态响应试验(角阶跃)
- 转向瞬态响应试验(角脉冲)
- 稳态回转试验
- 转向中心区
- 转向回正性
- 高/侧向加速度斜坡试验
- 方向盘力矩试验
- …
3.2 平顺性测试
至少要熟悉GB-T 4970-2009(汽车平顺性试验方法),常见的有:
- 脉冲输入试验
- 随机输入试验
3.3 制动测试
暂略
对于客观测试,是VD设计工程师最有价值的数据,要明白数据的来源和用途,必须要自己会处理数据。才能对车辆性能有更深入的了解。这部分的内容没有太多参考书籍,主要是研读标准即可。
4. 主观评价&调校
对于偏评价的VD工程师,主要工作涉及到两方面:
- 性能的评价
- 性能的调校
一般而言,调校能力要求更高,不仅需要能对车辆性能做出主观评判,还能找到当前问题的原因并改进,所以说,如果做调校相关的工作,VD的理论基础是不可缺少的。
如何主观评价
主观评价的能力主要是通过长期的驾驶培训及实践来积累,在此之外,也需要阅读一些与评价相关的书籍,用来建立主观评价的理论体系,也会涉及到各个主观性能的分解,也是有一套科学理论的方法的。推荐书籍:

如何调校
对于调校,除了之前介绍的一些理论上的书之外,可以阅读另外一些偏调校的书,一般是赛车手或调校技师编写的书,对于数学功底弱,不愿意看抽象理论的调校工程师,可以直接看这些书,但是缺点是这些书大多是赛车手写的,对于平顺性的关注不足。

对于不做调校的VD工程师,也要参与调校过程,至少要具备一定的评价能力,能够与评价工程师进行无障碍沟通。只有主客观工程目标一致并达成,才算得上是车型开发正常闭环。
5. 其他
补充一些其他的零碎知识,主要是不太方便放到上述比较有层次的文章中,单拿出来说明一下:
- 平台开发:关注常见/主流的底盘平台,特别是要了解主流悬架形式(麦弗逊、扭力梁、E型多连杆、五连杆、梯形臂)的特性
- 数据库:学会维护自己的数据库,无论是KC、操稳还是平顺性的测试数据,零部件关键性能指标常见范围,还是不同车型的设计方案,关键参数等
- 开发流程:熟悉V字型开发流程,对标-设定目标-分解-仿真设计-零部件开发-客观验证-主观评价调校-验收
- 开发工具:不能局限于定性分析,理论知识只能给出方向性判断(还不一定对),一定要掌握计算工具,用数据说话,要做到能量化;除了专用软件外,学习些编程语言、建模工具、优化工具,甚至自己开发一些工具,会有很大帮助
- 重视对标:纯正向开发不存在的,也不需要;对标数据对开发有极大的帮助
- 阅读论文:养成看论文的习惯


















 1400
1400

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











