







 本文介绍利用白噪声信号生成车辆四轮路谱用于平顺性仿真的方法。先阐述路面不平度表示,包括统计特性及空间与时间频率转换;接着以滤波白噪声法为例生成时域路面模型;还介绍前后轮、左右轮路面建模原理与计算;最后给出Simulink建模思路,并提供代码和模型网盘链接。
本文介绍利用白噪声信号生成车辆四轮路谱用于平顺性仿真的方法。先阐述路面不平度表示,包括统计特性及空间与时间频率转换;接着以滤波白噪声法为例生成时域路面模型;还介绍前后轮、左右轮路面建模原理与计算;最后给出Simulink建模思路,并提供代码和模型网盘链接。
编辑:CrazyRabbit
日期:2022年6月29日
介绍了如何利用白噪声信号生成车辆四轮的路谱,用于车辆平顺性仿真;并给出实际MATLAB代码和Simulink模型。
1. 路面不平度表示方法
1.1 路面不平度统计特性
对于路面的描述,利用的是其统计学特性。
下表为国际标准化组织经实际测量后制定的描述路面不平度的8级分类标准。
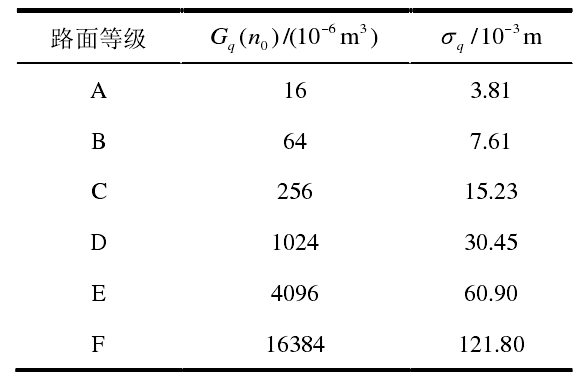
标准建议路面功率谱密度
G
q
(
n
)
G_q(n)
Gq(n)用以下公式拟合:
G
q
(
n
)
=
G
q
(
n
0
)
(
n
n
0
)
−
W
G_q(n) = G_q(n_0)(\frac{n}{n_0})^{-W}
Gq(n)=Gq(n0)(n0n)−W
其中:
- n n n为空间频率(m-1),是波长的倒数
- n 0 n_0 n0为参考空间频率,一般 n 0 = 0.1 n_0=0.1 n0=0.1
- G q ( n 0 ) G_q(n_0) Gq(n0)为参考空间频率 n 0 n_0 n0下的路面功率谱密度值,也称为路面不平度系数,单位m2/m-1=m3
- W W W是频率指数,为双对数坐标上的斜率
上述标准将路面分为了8个等级,并列出了 0.011 m − 1 < n < 2.83 m − 1 0.011m^{-1}<n<2.83m^{-1} 0.011m−1<n<2.83m−1范围内的路面不平度系数
以上内容为简述,详细可参考我的另一篇文章《平顺性路面》
1.2 空间频率 vs 时间频率
上节中的功率谱密度是基于空间的,在实际分析中,要引入车速这一变量,将其转化为时间功率谱。当车辆以一定速度v行驶在空间频率n的路面上时,可以得出:
f
=
v
n
f = vn
f=vn
G
q
(
f
)
=
1
v
G
q
(
n
)
=
G
q
(
n
0
)
n
0
2
v
f
2
G_q(f) = \frac 1v G_q(n)=G_q(n_0)n_0^2\frac{v}{f^2}
Gq(f)=v1Gq(n)=Gq(n0)n02f2v
但上式中,
f
→
0
f \rightarrow0
f→0时,
G
q
(
f
)
→
∞
G_q(f)\rightarrow \infty
Gq(f)→∞,这不符合工程实际,因此设定下线截止频率
f
m
i
n
=
v
n
m
i
n
f_{min}=vn_{min}
fmin=vnmin,则:
G
q
(
f
)
=
G
q
(
n
0
)
n
0
2
v
f
2
+
f
m
i
n
2
(
1
)
G_q(f)=G_q(n_0)n_0^2\frac{v}{f^2+f_{min}^2} \space (1)
Gq(f)=Gq(n0)n02f2+fmin2v (1)
2. 滤波白噪声法
上述标准中给定的是基于实测时域数据总结出的统计特性(频域),在实际仿真中,我们需要路面的时域模型,而实测路面是耗时费钱的工作,所以根据上述的统计特性利用数学工具生成虚拟时域路面模型是有一定价值的。
常见的生成路面时域模型的方法有:滤波白噪声法、谐波叠加法、AR/ARMA法等,本文以滤波白噪声法为例。
2.1 原理
滤波白噪声法基于这样的假设:将路面激励
q
q
q视为单位白噪声
w
w
w的一阶线性系统的响应。
假设其微分方程为:
x
q
˙
(
t
)
+
a
x
q
(
t
)
=
b
w
(
t
)
\dot{x_q}(t)+ax_q(t)=bw(t)
xq˙(t)+axq(t)=bw(t)
2.2 参数求解
进行拉氏变换,可得频率响应函数为:
H
q
−
w
(
ω
)
=
b
a
+
ω
⋅
j
H_{q-w}(\omega) = \frac{b}{a+\omega \cdot j}
Hq−w(ω)=a+ω⋅jb
H
q
−
w
(
f
)
=
b
a
+
2
π
f
⋅
j
(
2
)
H_{q-w}(f) = \frac{b}{a+2\pi f \cdot j} \space \space (2)
Hq−w(f)=a+2πf⋅jb (2)
根据随机振动理论,频率响应函数和功率谱密度的关系:
G
q
(
f
)
=
∣
H
q
−
w
(
f
)
∣
2
G
w
(
f
)
(
3
)
G_q(f) = |H_{q-w}(f)|^2G_w(f) \space \space (3)
Gq(f)=∣Hq−w(f)∣2Gw(f) (3)
G
w
(
f
)
=
1
G_w(f) = 1
Gw(f)=1
根据公式(1)(2)(3)可以得出:
a
=
2
π
f
m
i
n
,
b
=
2
π
n
0
G
q
(
n
0
)
v
a= 2\pi f_{min} , b = 2\pi n_0 \sqrt{G_q(n_0)v}
a=2πfmin,b=2πn0Gq(n0)v
3. 前后轮路面建模
根据第2节中结论,可以根据白噪声输入,和求得的传递函数即可求得单轮的(假设为左前轮)路面输入谱。
3.1 原理
当前需要的问题是,如何生成其他三个车轮的随机路谱,主要是:
- 根据前轮生成后轮,需求得相应的频率响应函数
- 根据左轮生成右轮,需求得相应的频率响应函数
根据前轮生成后轮相对简单,前后轮经过的是同一个路面,后轮在时间上会有滞后,滞后时间等于轴距除以车速 τ = L / v \tau=L/v τ=L/v。
3.2 计算
前后路面激励关系:
q
r
(
t
)
=
q
f
(
t
−
τ
)
q_r(t) = q_f(t-\tau)
qr(t)=qf(t−τ)
将其做傅里叶变换可得:
q
r
(
ω
)
=
q
f
(
ω
)
e
−
j
ω
τ
q_r(\omega) = q_f(\omega) e^{-j\omega\tau}
qr(ω)=qf(ω)e−jωτ
H
r
−
f
=
e
−
j
ω
τ
H_{r-f}=e^{-j\omega\tau}
Hr−f=e−jωτ
上式涉及到无理数,计算不够方便,采用二阶Pada近似计算,得出:
H
r
−
f
(
ω
)
=
1
−
1
2
τ
(
j
ω
)
+
1
12
τ
2
(
j
ω
)
2
1
+
1
2
τ
(
j
ω
)
+
1
12
τ
2
(
j
ω
)
2
H_{r-f}(\omega) = \frac{1-\frac12 \tau (j\omega)+\frac{1}{12}\tau^2(j\omega)^2}{1+\frac12 \tau (j\omega)+\frac{1}{12}\tau^2(j\omega)^2}
Hr−f(ω)=1+21τ(jω)+121τ2(jω)21−21τ(jω)+121τ2(jω)2
4. 左右轮路面建模
根据左轮生成右轮,相对根据前轮生成后轮复杂。不能直接根据另一个白噪声单独生成另一组路谱,因为左右轮的路面具有一定的相关性,所以要考虑其相关性。
4.1 原理
为了考虑左右轮的相关性和随机性,假设:用于生成右轮路谱的白噪声
w
r
w_r
wr,可以视为左轮白噪声
w
l
w_l
wl和另一个不相干的白噪声
w
z
w_z
wz的双输入线性系统的响应。其频率响应函数分别为
H
1
(
ω
)
H_1(\omega)
H1(ω)和
H
2
(
ω
)
H_2(\omega)
H2(ω),即:
w
r
=
H
1
(
ω
)
w
l
+
H
2
(
ω
)
w
z
w_r = H_1(\omega)w_l+H_2(\omega)w_z
wr=H1(ω)wl+H2(ω)wz
那么,
KaTeX parse error: No such environment: align at position 7: \begin{̲a̲l̲i̲g̲n̲}̲ q_r &= H_{q-w}…
上式中,
q
l
、
H
q
−
w
、
w
z
q_l、H_{q-w}、w_z
ql、Hq−w、wz都为已知,只需要求得
H
1
(
ω
)
、
H
2
(
ω
)
H_1(\omega)、H_2(\omega)
H1(ω)、H2(ω)。
4.2 公式推导
根据随机振动理论,左右轮的相干函数定义为:
c
o
h
l
r
2
(
ω
)
=
∣
G
l
r
(
ω
)
∣
G
l
l
(
ω
)
G
r
r
(
ω
)
\mathrm{coh}_{lr}^2(\omega) = \frac{|G_{lr}(\omega)|}{G_{ll}(\omega)G_{rr}(\omega)}
cohlr2(ω)=Gll(ω)Grr(ω)∣Glr(ω)∣
假设左右轮的统计特性相同即:
G
r
(
ω
)
=
G
l
(
ω
)
G_r(\omega) = G_{l}(\omega)
Gr(ω)=Gl(ω)
左右轮路谱的互功率谱密度与左轮路谱的自功率谱密度关系为:
G
l
r
(
ω
)
=
H
1
(
ω
)
G
l
l
(
ω
)
G_{lr}(\omega) = H_1(\omega)G_{ll}(\omega)
Glr(ω)=H1(ω)Gll(ω)
那么,根据上面的三个公式,可以得出:
∣
H
1
(
ω
)
∣
2
=
c
o
h
l
r
2
(
ω
)
|H_1(\omega)|^2 = \mathrm{coh}_{lr}^2(\omega)
∣H1(ω)∣2=cohlr2(ω)
而白噪声
w
r
w_r
wr的自功率谱密度与
w
x
w_x
wx和
w
t
w_t
wt的自功率谱密度的关系是:
G
r
=
H
1
2
(
ω
)
G
l
(
ω
)
+
H
2
2
(
ω
)
G
z
(
ω
)
G_{r}= H_{1}^2(\omega)G_l(\omega)+H_2^2(\omega)G_z(\omega)
Gr=H12(ω)Gl(ω)+H22(ω)Gz(ω)
由于
w
l
、
w
r
、
w
z
w_l、w_r、w_z
wl、wr、wz都是单位白噪声,功率谱密度恒为1,所以:
H
1
2
(
ω
)
+
H
2
2
(
ω
)
=
1
H_1^2(\omega)+H_2^2(\omega)=1
H12(ω)+H22(ω)=1
所以,最终我们得到:
∣
H
1
(
ω
)
∣
=
c
o
h
l
r
(
ω
)
|H_1(\omega)|=\mathrm{coh}_{lr}(\omega)
∣H1(ω)∣=cohlr(ω)
∣
H
2
(
ω
)
∣
=
1
−
c
o
h
l
r
(
ω
)
|H_2(\omega)|= 1-\mathrm{coh}_{lr}(\omega)
∣H2(ω)∣=1−cohlr(ω)
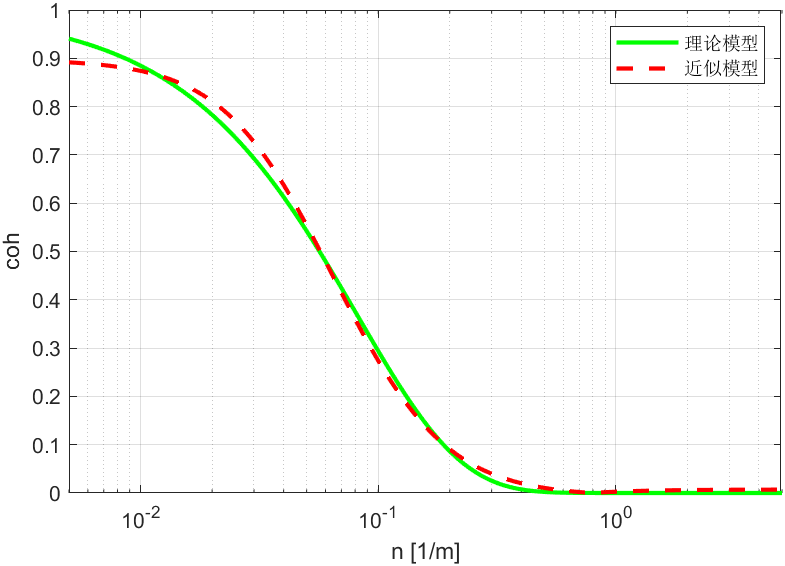
4.3 参数拟合
根据4.2的推导,可以根据左右轮的相干性函数
c
o
h
l
r
(
ω
)
\mathrm{coh}_{lr}(\omega)
cohlr(ω)获得
H
1
H_1
H1和
H
2
H_2
H2。
相干性函数
c
o
h
l
r
(
ω
)
\mathrm{coh}_{lr}(\omega)
cohlr(ω)根据前人的研究结果,有以下经验公式:
c
o
h
l
r
2
(
ω
)
=
e
−
ρ
T
π
v
ω
\mathrm{coh}_{lr}^2(\omega)=e^{\frac{-\rho T}{\pi v}\omega}
cohlr2(ω)=eπv−ρTω
其中T是轮距。
上述的经验公式为无理函数,需近似为多项式形式才能用于传递函数计算,假设:
H
1
(
ω
)
=
a
2
(
j
ω
)
2
+
a
1
(
j
ω
)
+
a
0
b
2
(
j
ω
)
2
+
b
1
(
j
ω
)
+
b
0
H_1(\omega)=\frac{a_2(\mathrm j \omega)^2+a_1(\mathrm j \omega)+a_0}{b_2(\mathrm j \omega)^2+b_1(\mathrm j \omega)+b_0}
H1(ω)=b2(jω)2+b1(jω)+b0a2(jω)2+a1(jω)+a0
H
2
(
ω
)
=
c
2
(
j
ω
)
2
+
c
1
(
j
ω
)
+
c
0
b
2
(
j
ω
)
2
+
b
1
(
j
ω
)
+
b
0
H_2(\omega)=\frac{c_2(\mathrm j \omega)^2+c_1(\mathrm j \omega)+c_0}{b_2(\mathrm j \omega)^2+b_1(\mathrm j \omega)+b_0}
H2(ω)=b2(jω)2+b1(jω)+b0c2(jω)2+c1(jω)+c0
可以根据智能优化算法(如GA遗传算法)求出待定系数的值
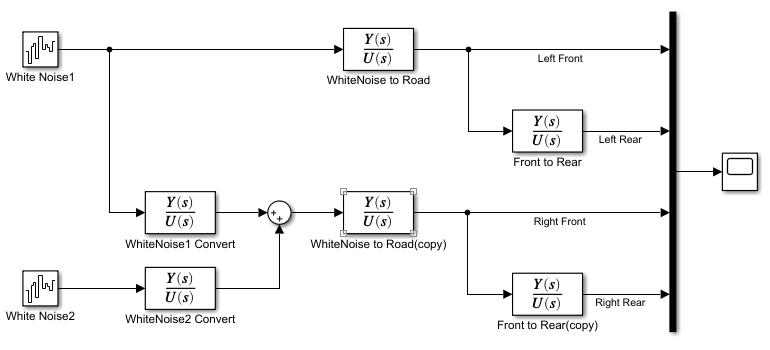
5. Simulink建模
总结上述2、3、4节的内容,车辆四轮路面不平度的时域再现的总体思路为:
- 根据输入白噪声 w 1 w_1 w1和传递函数 H q − w H_{q-w} Hq−w,可以获得左前轮的路谱
- 根据前后轮时滞时间 τ \tau τ,拟合传递函数 H r − f H_{r-f} Hr−f,可以根据左前轮生成左后轮的路谱
- 根据输入白噪声 w 1 、 w 2 w_1、w_2 w1、w2和拟合的传递函数 H 1 、 H 2 H_{1}、H_{2} H1、H2,可以生成右前轮的路谱
- 根据右前轮路谱,用第二条同样的方法,生成右后轮的路谱
建立的Simulink模型如下图:
4.3节参数的拟合效果:
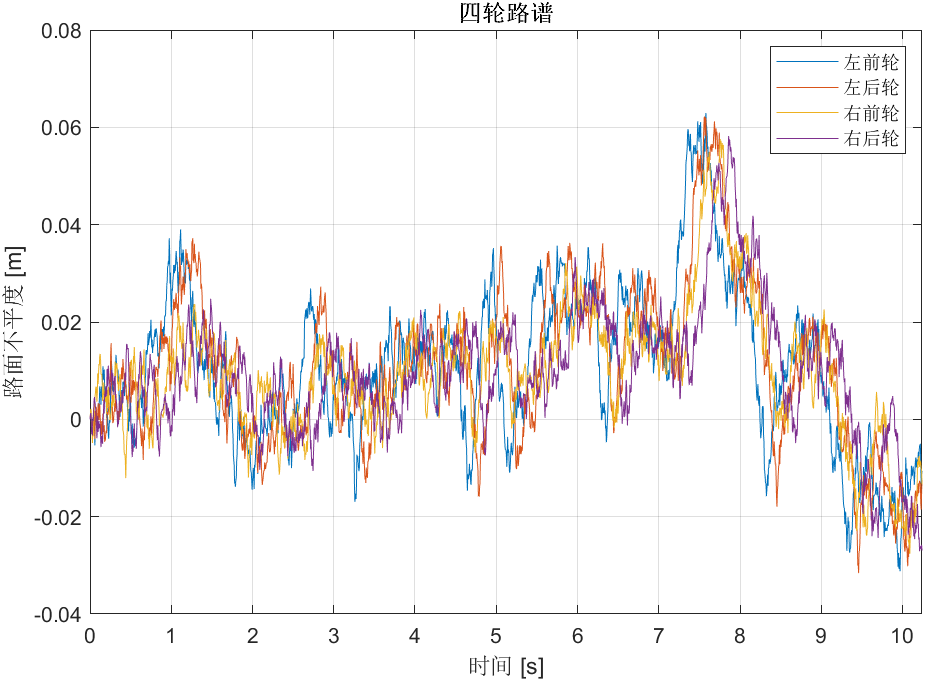
四轮的路谱如下:
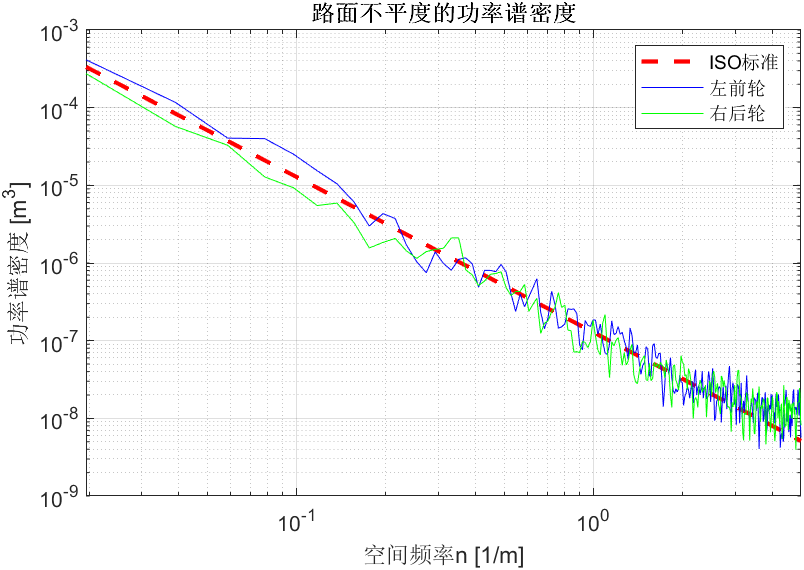
生成的路谱功率谱密度验证:
参考资料
- 基于悬架非线性特性的车辆振动状态观测算法研究——卢凡,北京理工博士论文
- 路面对四轮汽车输入的时域模型——赵珩,卢士富
- 车辆悬架系统振动控制——张进秋,黄大山,姚军著
其他
- 特别指出《车辆悬架系统振动控制》第二章相关内容有大量的错误,请大家留意
- 代码及模型的百度网盘:链接:https://pan.baidu.com/s/1Ouiu5iYeF4ZS7UtzAfIdDQ
提取码:9nj4



















 1541
1541

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











