






一、ArUco简介

ArUco是一个开源的微型的现实增强库,目前已经集成在OpenCV3.0以上的版本内了,它除了用于现实增强,还很用于实现一些机器视觉方面的应用,上图中的波士顿动力也曾用此方法用于Atlas的视觉定位。
aruco标记是可用于摄像机姿态估计的二进制方形基准标记。它的主要优点是检测简单、快速,并且具有很强的鲁棒性。ArUco 标记是由宽黑色边框和确定其标识符(id)的内部二进制矩阵组成的正方形标记。aruco标记的黑色边框有助于其在图像中的快速检测,内部二进制编码用于识别标记和提供错误检测和纠正。aruco标记尺寸的大小决定内部矩阵的大小,例如尺寸为 4x4 的标记由 16 位二进制数组成。
通俗地说,aruco标记其实就是一种编码,就和我们日常生活中的二维码是相似的,只不过由于编码方式的不同,导致它们存储信息的方式、容量等等有所差异,所以在应用层次上也会有所不同。由于单个aruco标记就可以提供足够的对应关系,例如有四个明显的角点及内部的二进制编码,所以aruco标记被广泛用来增加从二维世界映射到三维世界时的信息量,便于发现二维世界与三维世界之间的投影关系,从而实现姿态估计、相机矫正等等应用。
OpenCV中的ArUco模块包括了对aruco标记的创建和检测,以及将aruco标记用于姿势估计和相机矫正等应用的相关API,同时还提供了标记板等等。
二、ArUco标记的创建与检测
创建aruco标记时,首先需要先指定一个字典,这个字典表示的是创建出来的aruco标记具有怎样的尺寸、怎样的编码等等内容,我们使用API: getPredefinedDictionary()来声明我们使用的字典。
在OpenCV中,提供了多种预定义字典,我们可以通过PREDEFINED_DICTIONARY_NAME来查看有哪些预定义字典。而且字典名称表示了该字典的aruco标记数量和尺寸,例如DICT_7X7_50表示一个包含了50种7x7位标记的字典。
在线aruco标记生成器:https://chev.me/arucogen/
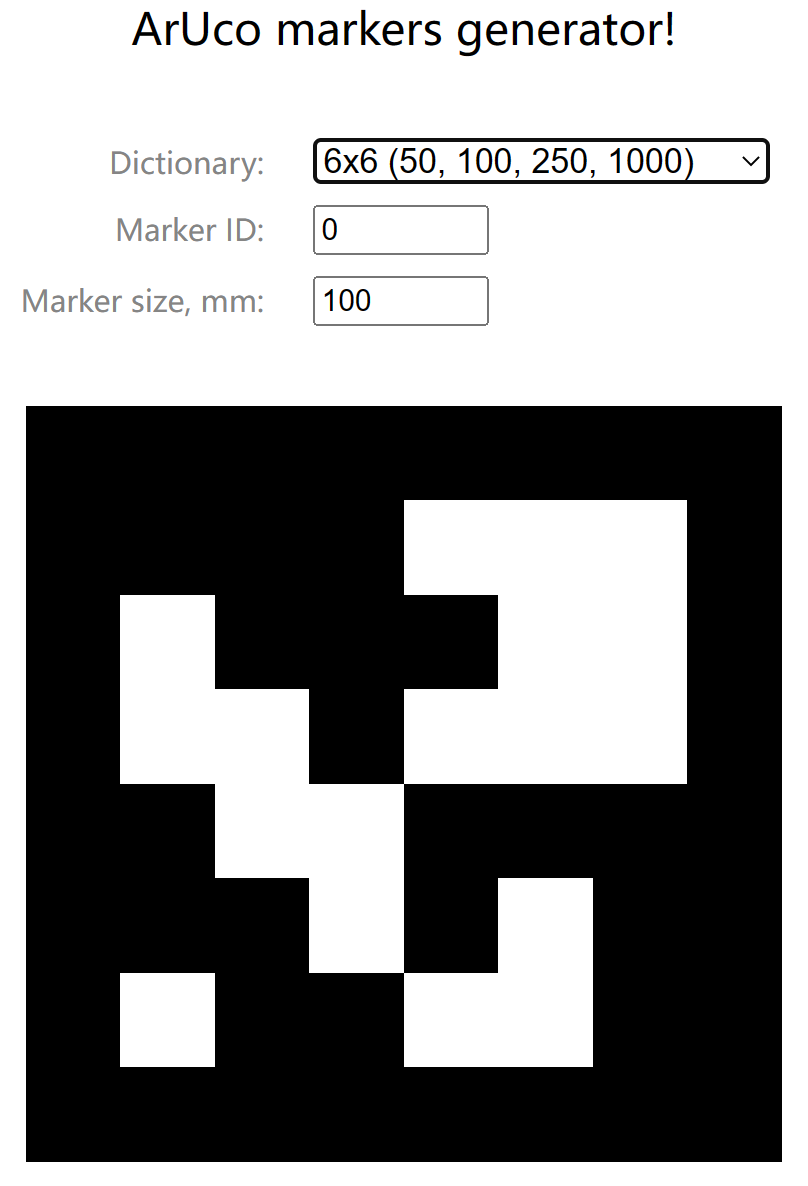
或者https://www.2weima.com/aruco.html

使用python创建
import cv2 as cv
import numpy as np
# 创建
dictionary = cv.aruco.getPredefinedDictionary(dict=cv.aruco.DICT_6X6_250)
#dictionary = cv2.aruco.Dictionary_get(cv2.aruco.DICT_6X6_250)
img = cv.aruco.drawMarker(dictionary, id=23, sidePixels=200, borderBits=1)
# id 指定该Marker在字典中的索引ID,该例中合法的ID为[0, 249]
# sidePixels 指定输出的Marker图像的尺寸,单位是像素,该例中为(200,200)
# 如果使用DICT_6X6_250,则编码区域被划分为6X6个等大小的模块
# 参数borderBits=1,所以整个标志块区域被划分为8X8个等大小的模块
# 模块的尺寸必须大于一个像素。因此该例中,此参数最小值为8
# borderBits 指定编码区域到标志块区域的距离。单位是编码模块。取值必须大于等于1
print(img.shape)
cv.imshow("Aruco Marker", img)
cv.waitKey()
cv2.imwrite("marker"+str(id)+".png", markerImage)创建并检测
# 创建图像
img_detected = np.ones((800, 600), dtype=np.uint8) * 255
img_detected[50:250, 50:250] = cv.aruco.drawMarker(dictionary, id=23, sidePixels=200, borderBits=1)
img_detected[350:400, 350:400] = cv.aruco.drawMarker(dictionary, id=18, sidePixels=50, borderBits=1)
img_detected[450:500, 450:500] = cv.aruco.drawMarker(dictionary, id=33, sidePixels=50, borderBits=1)
cv.imshow("img_detected", img_detected)
cv.waitKey()
corners, ids, rejectedImgPoints = cv.aruco.detectMarkers(image=img_detected,
dictionary=dictionary,
parameters=None)
img_color = cv.cvtColor(img_detected, cv.COLOR_GRAY2BGR)
cv.aruco.drawDetectedMarkers(img_color, corners, ids)
cv.imshow("DectectedMarker", img_color)
cv.waitKey()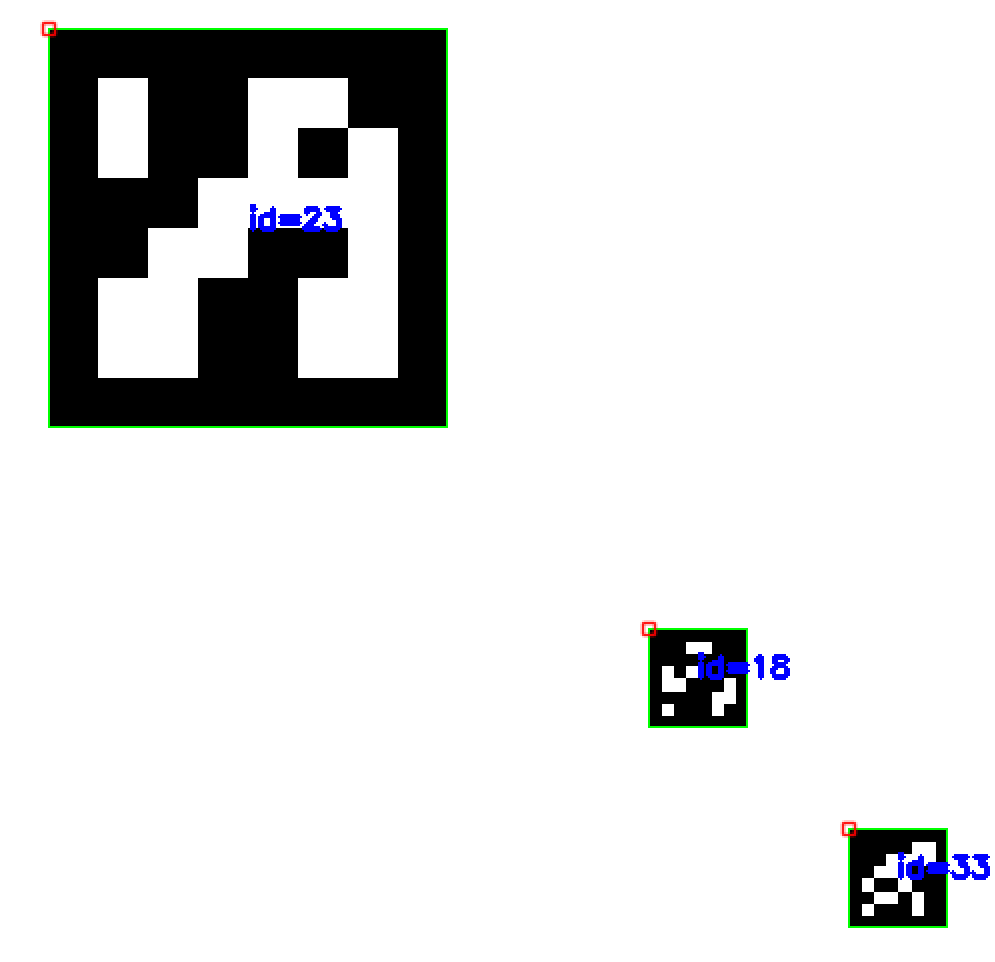



















 1549
1549

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











