






 本文探讨了永磁同步电机PMSM的控制模型,重点介绍了SVPWM策略及其与PID控制器的结合,如何通过Simulink实现坐标变换和闭环控制。旨在提供PMSM控制的理论基础和实践指导。
本文探讨了永磁同步电机PMSM的控制模型,重点介绍了SVPWM策略及其与PID控制器的结合,如何通过Simulink实现坐标变换和闭环控制。旨在提供PMSM控制的理论基础和实践指导。
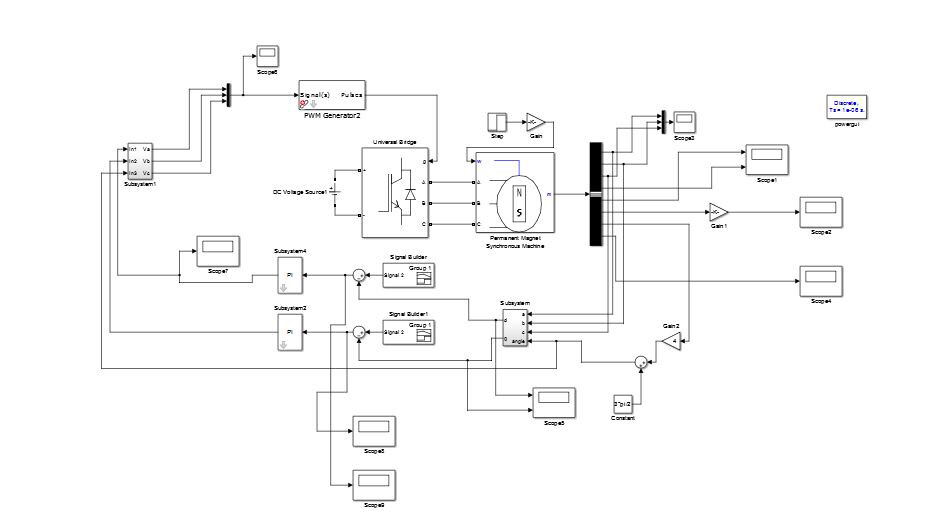
永磁同步电机SVPWM控制模型,基于simulink搭建,可 以实现坐标变换,闭环控制。
包含PID控制。
ID:615641908267661
Lylink
永磁同步电机(Permanent Magnet Synchronous Motor,简称PMSM)作为一种高效率、高功率密度和高转矩密度的电机,广泛应用于工业和家用领域。在PMSM控制中,矢量控制(Vector Control)是一种常用的控制策略,它能够实现高精度的速度和转矩控制。
本文将围绕PMSM的控制模型展开讨论,并基于Simulink进行建模和仿真。我们将首先介绍PMSM的基本原理和数学模型,然后详细介绍SVPWM(Space Vector Pulse Width Modulation)控制策略,并结合PID控制器进行闭环控制。
首先,我们来了解PMSM的基本原理。PMSM由永磁体和定子绕组组成,通过施加电流控制永磁体的磁场,实现电机的转矩控制。PMSM的数学模型可以用dq坐标系描述,其中d轴与永磁体磁场方向一致,q轴与d轴垂直。在dq坐标系下,PMSM的数学模型可以表示为:
[v_s = R_s i_s + L_s \frac{{di_s}}{{dt}} + v_e ]
[T_e = \frac{{3p}}{{2}} (L_d - L_q) i_d i_q - J \frac{{d\omega_m}}{{dt}} ]
其中,(v_s)为电机的输入电压,(i_s)为电机的输入电流,(R_s)为定子电阻,(L_s)为定子电感,(v_e)为电机的电动势,(T_e)为电机的输出转矩,(L_d)和(L_q)分别为d轴和q轴的轴向电感,(i_d)和(i_q)分别为d轴和q轴的轴向电流,(J)为转动惯量,(\omega_m)为电机的机械角速度。
在实际控制中,我们希望通过控制输入电压(v_s)来实现对电机的速度和转矩控制。SVPWM是一种常用的控制策略,它通过控制逆变器的开关状态来实现对输入电压的调节。SVPWM将输入电压分解为两个正弦波电压,分别作用于d轴和q轴,从而实现对电机的控制。SVPWM的控制模型可以表示为:
[v_{\alpha \beta} = V_m \sin(\theta) ]
[v_{dq} = \frac{2}{3} \begin{bmatrix} \cos(\theta) & -\cos(\theta+\frac{2\pi}{3}) & -\cos(\theta-\frac{2\pi}{3}) \ \sin(\theta) & -\sin(\theta+\frac{2\pi}{3}) & -\sin(\theta-\frac{2\pi}{3}) \end{bmatrix} \begin{bmatrix} v_d \ v_q \end{bmatrix} ]
其中,(v_{\alpha \beta})为两个正弦波电压,(V_m)为电压幅值,(\theta)为电压的相位角,(v_{dq})为d轴和q轴的电压。通过调节相位角(\theta)和电压幅值(V_m),可以实现对输入电压的控制。
在实际控制中,我们通常采用PID控制器对输入电压进行调节,以实现对电机的闭环控制。PID控制器由比例项(Proportional)、积分项(Integral)和微分项(Derivative)组成,可以根据误差信号来调节控制量。PID控制器的输出可以表示为:
[u(t) = K_p e(t) + K_i \int_0^t e(\tau)d\tau + K_d \frac{{de(t)}}{{dt}} ]
其中,(u(t))为PID控制器的输出,(K_p)、(K_i)和(K_d)为控制增益,(e(t))为误差信号。
通过将SVPWM控制策略和PID控制器相结合,我们可以实现PMSM的闭环控制。在Simulink中,可以通过建立控制模型,并设置相应的参数和初始条件,来进行仿真和分析。通过仿真结果,我们可以得到电机的速度和转矩响应,并对控制策略进行优化和调整。
综上所述,本文围绕永磁同步电机(PMSM)的SVPWM控制模型展开讨论,并通过Simulink进行建模和仿真。我们介绍了PMSM的基本原理和数学模型,详细介绍了SVPWM控制策略,并结合PID控制器进行闭环控制。通过仿真和分析,可以优化和调整控制策略,实现对电机的精确控制。希望本文对读者在PMSM控制方面提供一定的参考和帮助。
以上相关代码,程序地址:http://matup.cn/641908267661.html















 1162
1162

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









