









一、理论
SVPWM算法的具体讲解在这里:https://blog.csdn.net/qlexcel/article/details/74787619
1、判断扇区
根据下面3个式子:

再定义,若U1 > 0 ,则 A=1,否则 A=0;
若U2 > 0 ,则B=1,否则 B=0;
若U3 > 0 ,则 C=1,否则 C=0。
可以看出 A,B,C 之间共有八种组合,但由判断扇区的公式可知 A,B,C 不会同时为 1 或同时为 0,所以实际的组合是六种,A,B,C 组合取不同的值对应着不同的扇区,并且是一一对应的,因此完全可以由 A,B,C 的组合判断所在的扇区。为区别六种状态,令 N=4*C+2*B+A,则可以通过下表计算参考电压矢量Uref所在的扇区。

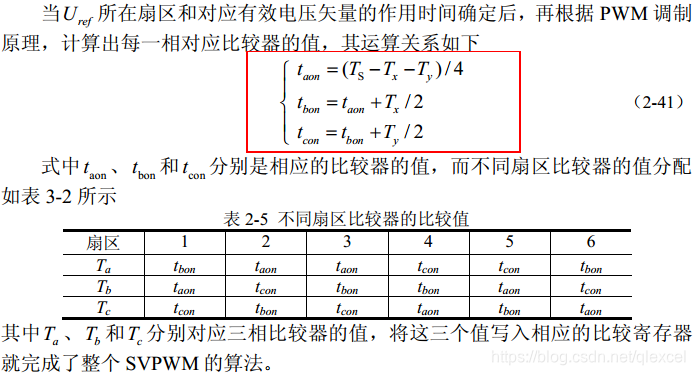
2、计算各矢量作用时间
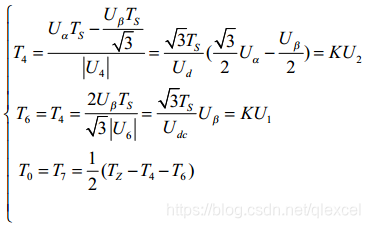
同理可求得Uref在其它扇区中各矢量的作用时间,结果如表2-4所示。表中两个非零矢量作用时间的比例系数为K =√3Ts/Udc 。
各扇区作用时间:
3、确定扇区矢量切换点(如扇区1中,矢量0到矢量4的切换点,矢量4到矢量6的切换点)
二、建模
1、添加扇区判断的子系统(根据输入的Ualpha和Ubeta判断电压矢量所在扇区):
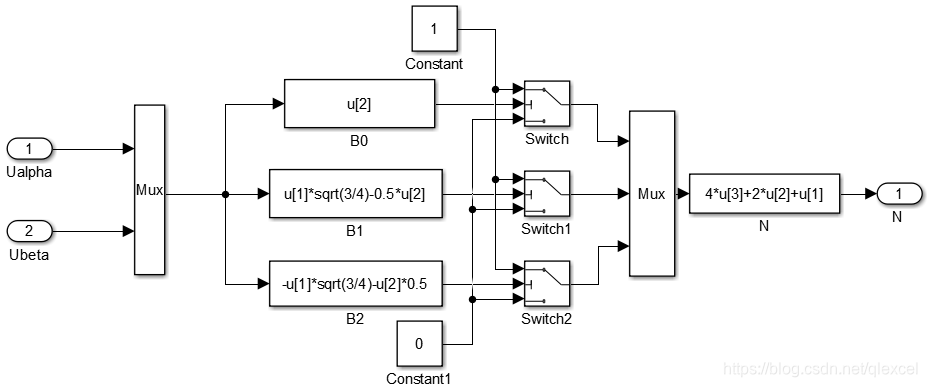
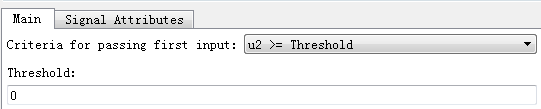
switch模块设置为:(条件为u2>=0,如果满足u1通过,如果不满足,u3通过)
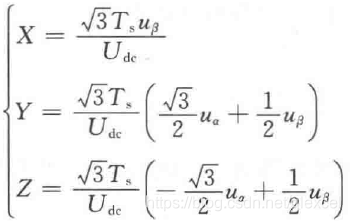
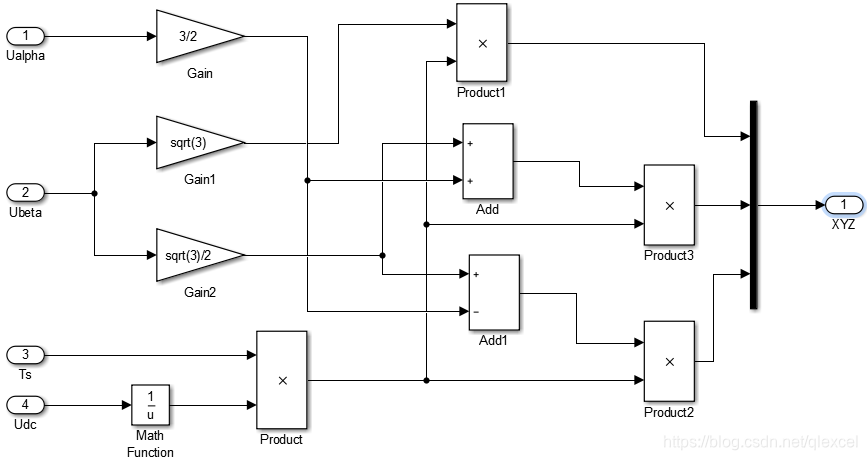
2、计算X、Y、Z,用于计算扇区矢量作用时间(输入Ualpha、Ubeta、母线电压Udc、载波周期时间Ts,计算X、Y、Z)。
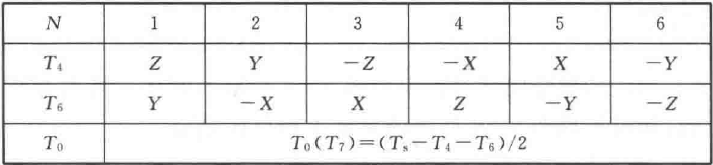
3、根据N值和X、Y、Z来计算扇区中矢量的作用时间(输入XYZ、N值、载波周期Ts,计算扇区中矢量作用时间)
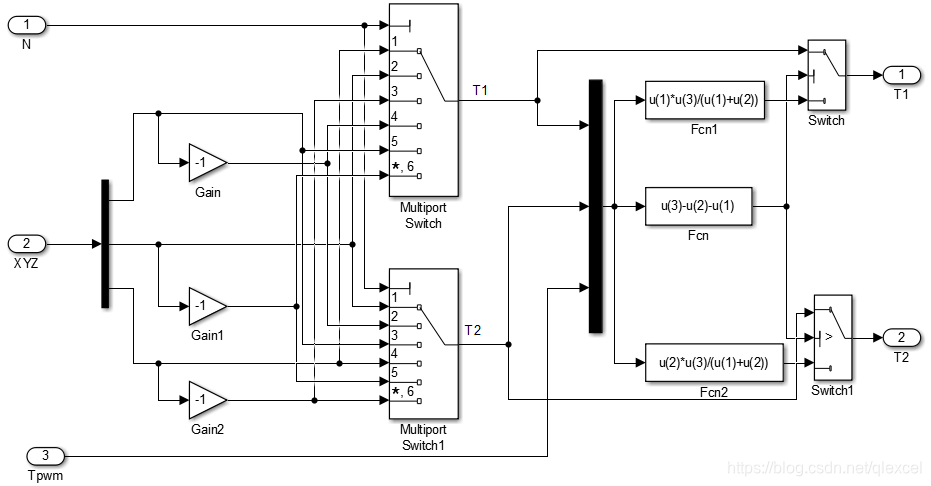
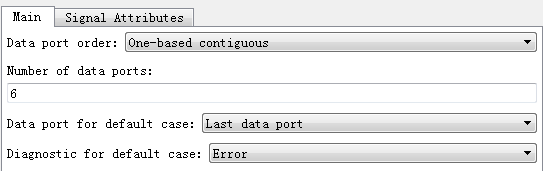
Mutiport Switch模块根据最上面输入的N值选择下面的那个端口通过。配置如下:
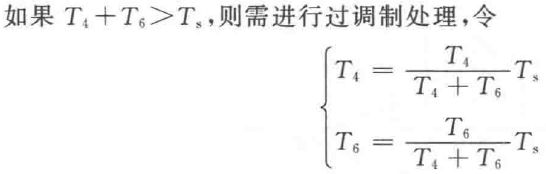
如:N=1,则Mutiport Switch模块输出为T1=Z、T2=Y,再根据Ts-Z-Y是否大于零来判断是否过调制。如果过调制,还要用上面给的比例公式,把Z和Y矫正一下再输出。
4、扇区矢量切换点的确定
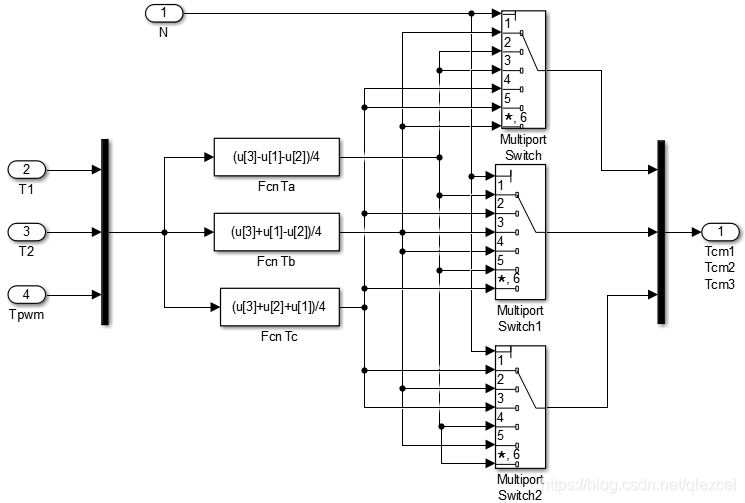
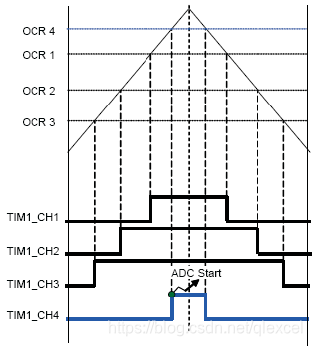
实现上是计算3个PWM通道输出电平的改变点。我们知道SVPWM中定时器是配置为中央对齐模式:
要在每个载波周期中改变输出通道的比较值,而计算出的Tcm1、Tcm2、Tcm3分别就是3个通道的比较值。
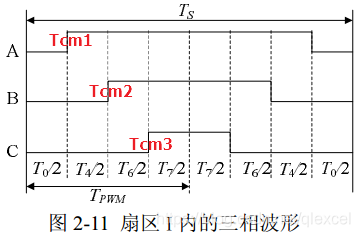
5、计算出了每个载波周期3个通道的比较值,再引入定时器的中央对齐模式,就可以输出逆变桥的控制信号了。(此处用三角波模拟定时器中央对齐模式)
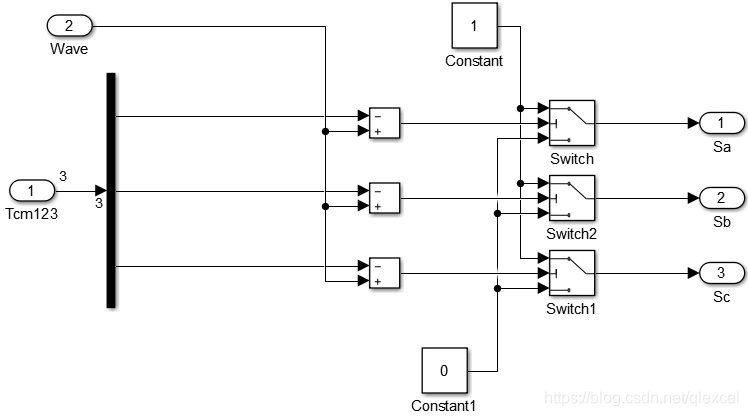
输入一个三角波模拟定时器中央对齐模式,用三角波当前值和通道比较值做对比,如果三角波的值大于通道比较值就输出高电平,如果小于就输出低电平。
6、使用3个通道的PWM控制逆变桥,计算相电压
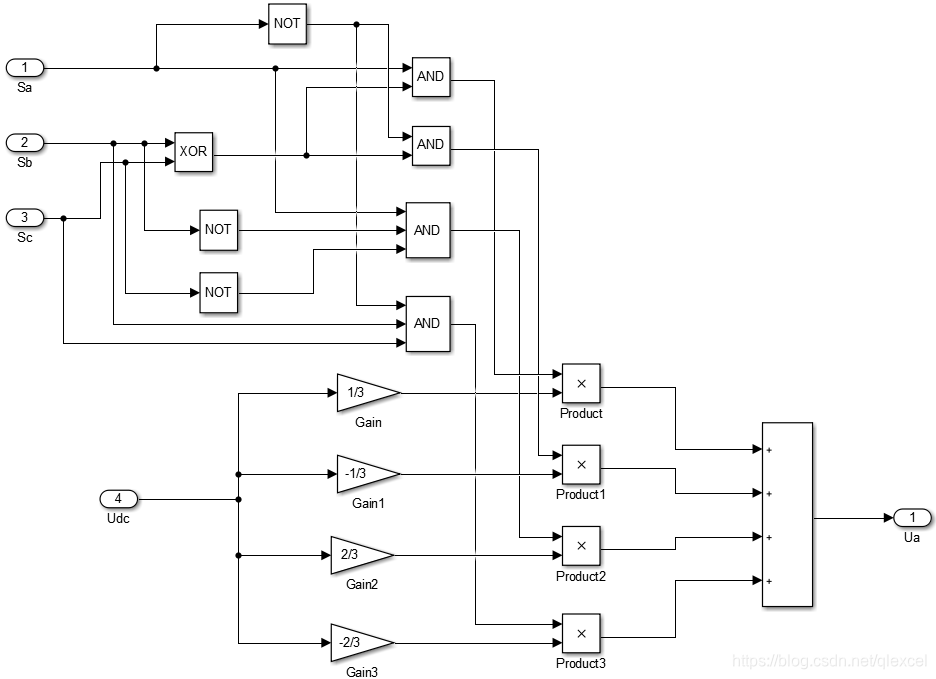
以其中一种开关组合为例分析,假设Sx(x=a、b、c)=(100),此时等效电路如图:

因此相电压可以表示为:(相电压是每相相对于电机中间连接点的电压)

从电阻分压的原理,可以知道相电压共有4种输出:1/3Udc、-1/3Udc、2/3Udc、-2/3Udc。因此上面的模型中,根据3个通道的电平状态来判断相电压输出这4中电压中的哪一个。如Sa、Sb、Sc都输入1,则经过逻辑运算后,到了Product模块,从上到下依次为:0,0,0,0,因此输出0.
7、最后总模型为:
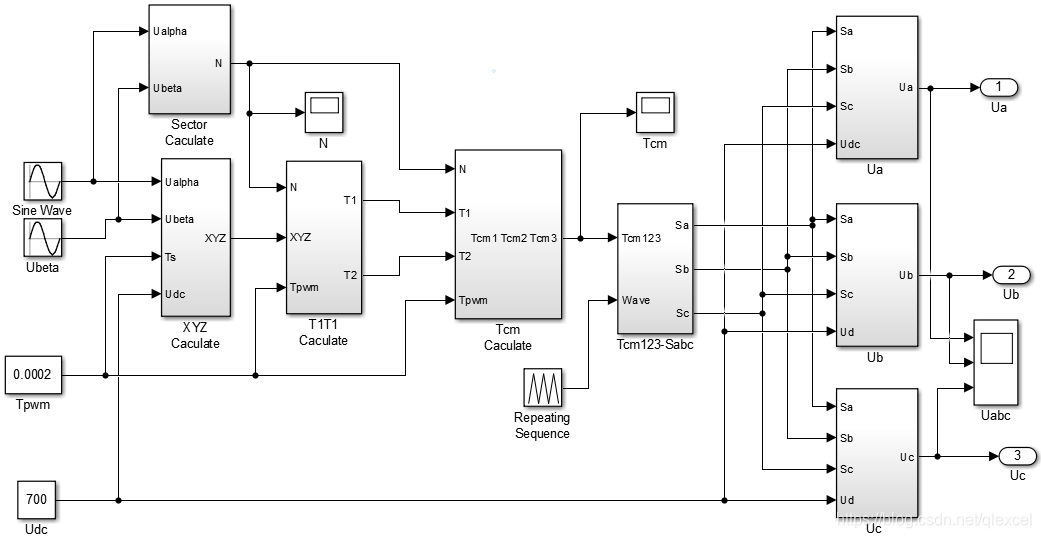
1)、正弦波信号源配置:
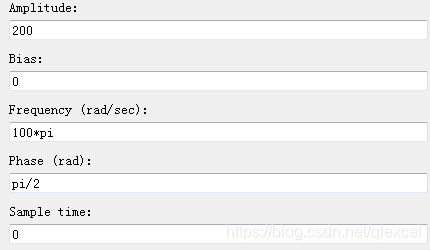
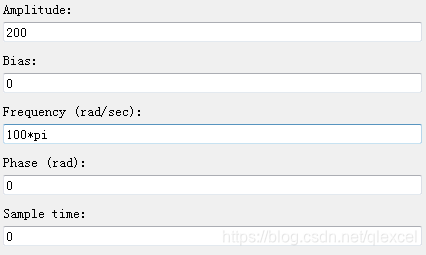
输入角速度为100π,幅值为200,相位互差90度的正弦波。角速度为100π,则周期为0.02,频率为50Hz,这个是电压矢量的旋转速度,即3000RPM。如果是一对极电机,转速就为3000RPM。
2)、Tpwm模块输入载波周期,此处载波为5KHz,所以值为0.0002秒。
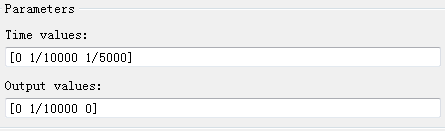
3)、三角波信号源配置:(即载波为5KHz)
8、仿真结果
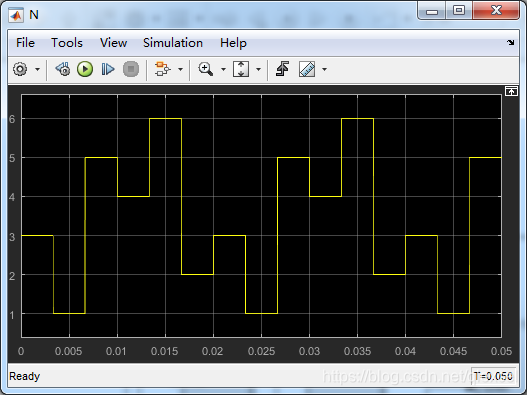
N值变化的波形:
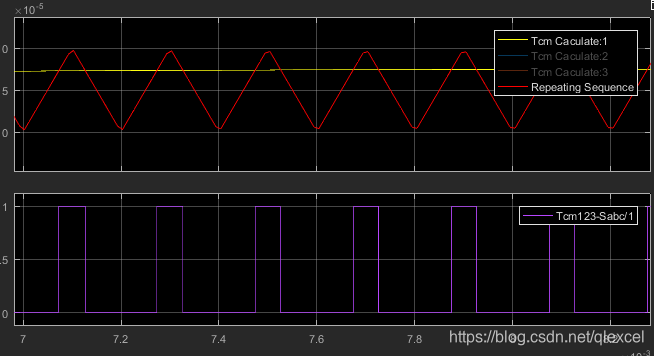
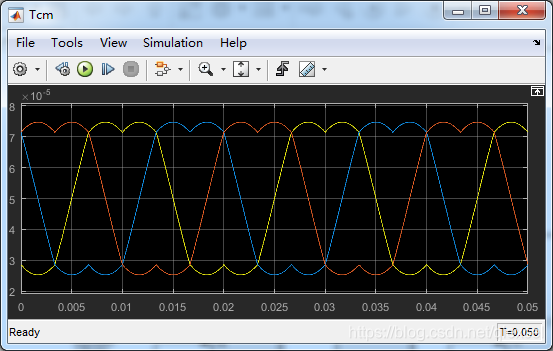
定时器通道比较值的波形,3个通道,波形呈马鞍形
定时器通道比较值的波形、三角载波、PWM控制波形:
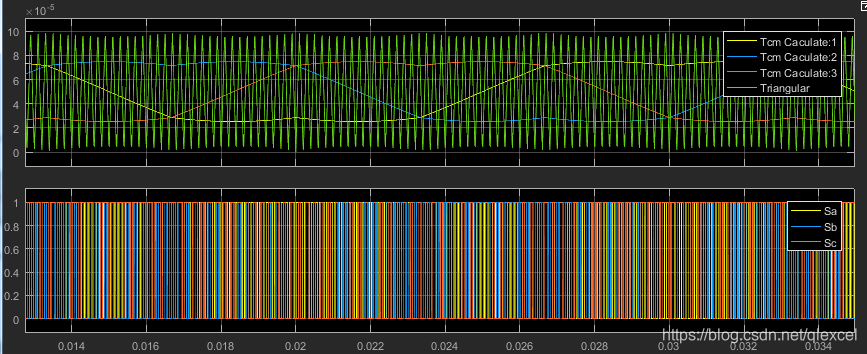
放大:
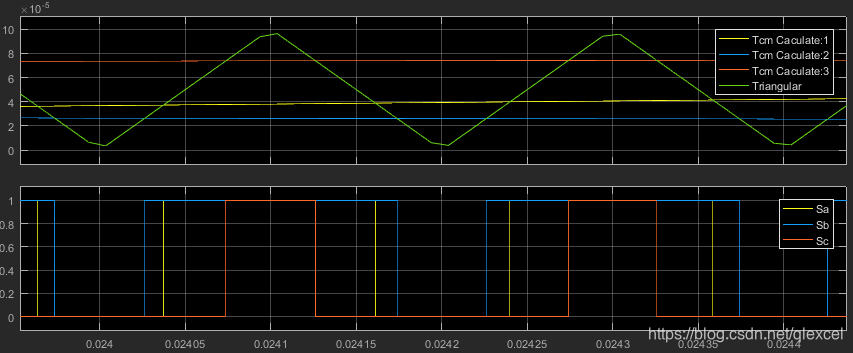
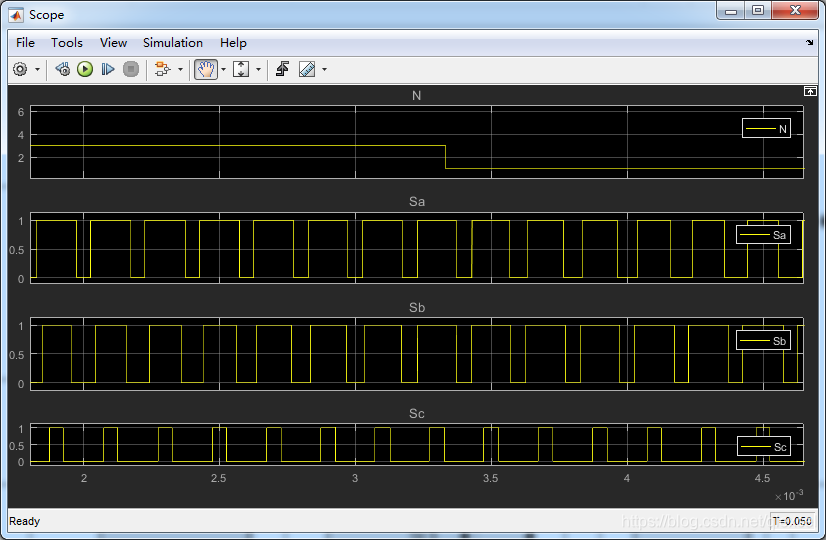
扇区N和3个通道PWM控制波形:
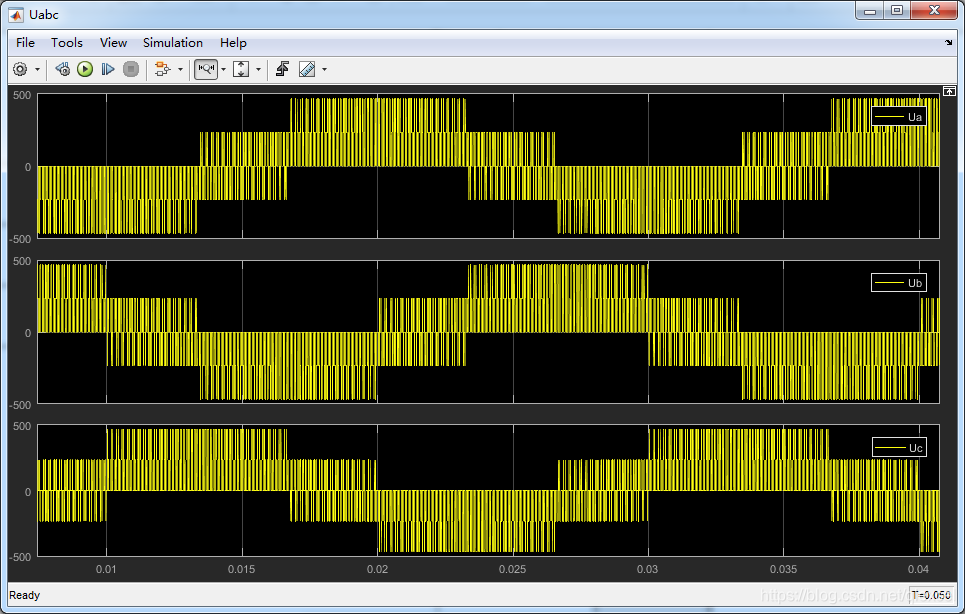
相电压波形:
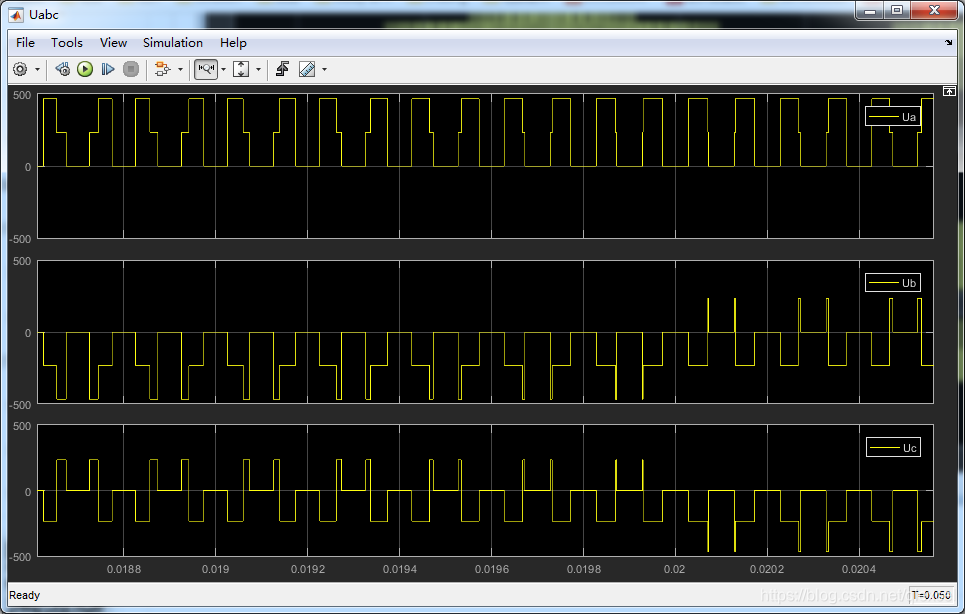
放大:
最后从下面位置加入powergui模块做FFT分析

仿真完后,双击powergui模块,打开FFT Analysis:

配置如下,分析Ua的基波幅值:
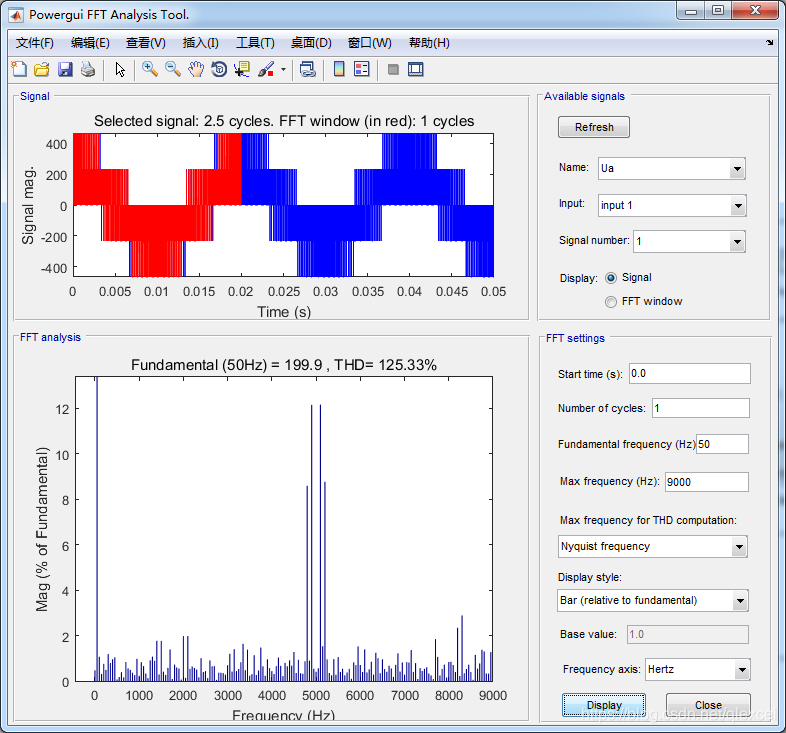
可以看到50Hz的基波幅值为199.9V,与实际值200V相符。此仿真结果验证了模型的正确性。
模型文件下载:https://download.csdn.net/download/qlexcel/11516270
注:模型来自《现代永磁同步电机控制原理及MATLAB仿真》__袁雷编著


















 5193
5193

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











