







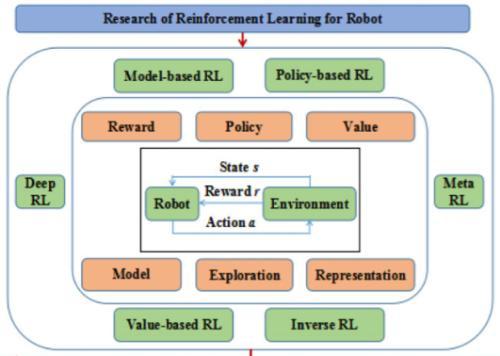
在人形机器人技术日新月异的今天,我们有必要暂时从令人惊叹的演示视频和高度堆叠的算法中抽离,回归工程师的视角,审视驱动这些复杂系统的底层——控制范式。
本文将对两大阵营进行一次技术解构:
- 基于模型的最优控制: 以MPC+WBC为代表,将控制问题定义为一个可解析的约束优化问题。
- 数据驱动的策略学习: 以IL和RL为代表,将控制问题定义为一个通过数据学习策略函数(Policy)的泛化问题。
我们的讨论将聚焦于“为什么”而非“好不好”,旨在揭示范式背后的核心假设及其带来的必然结果。
一、模型为纲:基于显式优化的MPC+WBC范式
该范式的核心信仰是:如果拥有一个足够精确的世界模型,最优控制问题就可以被形式化地求解。
底层问题定义:约束轨迹优化
其数学本质是在每一个离散时间步 k,求解一个具有以下形式的有限时域最优控制问题(OCP):
min_{u_k, ..., u_{k+N-1}} Σ_{i=k}^{k+N-1} l(x_i, u_i) + m(x_{k+N})
s.t.
x_{i+1} = f(x_i, u_i) // 系统动力学模型
h(x_i, u_i) <= 0 // 路径约束 (如关节限位)
g(x_i) <= 0 // 状态约束 (如ZMP稳定域)
-
MPC (Model Predictive Control) 的职责是求解这个OCP。它利用系统动力学模型
f(x, u)向前“预测”N步,找到一个使总代价(cost)最小的控制序列U = {u_k, ..., u_{k+N-1}}。关键在于,它只执行序列的第一个动作u_k,然后在下一时刻k+1接收新的状态x_{k+1},重新进行一次完整的滚动优化。这是一种在线的、反复重规划的策略。 -
WBC (Whole-Body Control) 则通常作为MPC的下游任务执行器。它将MPC给出的高层运动学目标(如质心加速度、末端执行器姿态)转化为全身关节力矩。WBC本身也是一个优化问题(通常是二次规划QP),但它更关注瞬时动力学
τ = M(q)q̈ + C(q, q̇) + G(q)和各类硬约束(接触力、摩擦锥、力矩限制),负责将“规划”落地为“物理执行”。
范式局限的根源:模型保真度
此范式的全部效能,都锚定在动力学模型 f(x, u) 和各类约束模型的准确性上。任何未建模的动力学效应(如柔性、驱动器延迟、复杂的接触物理)或环境参数失配(如地面摩擦系数、负载物体的惯量),都会直接导致优化问题的解偏离真实世界的最优,甚至导致系统失稳。其瓶颈在于为复杂、非结构化的现实世界建立一个完美可微的高保真模型,这在工程上是极其困难甚至不现实的。
二、数据为师:策略学习范式的兴起
策略学习范式转换了思路:与其尝试精确建模整个世界,不如直接学习一个从“观察”到“行动”的映射函数,即策略 π(a|s)。
澄清边界:监督学习 (SL) vs. 模仿学习 (IL)
在进入IL和RL之前,必须严格区分监督学习与模仿学习在控制领域的本质差异。
-
监督学习 (Supervised Learning):其核心是学习一个静态映射
f: X → Y。其训练数据{(x_i, y_i)}通常被假设为独立同分布 (I.I.D.)。预测y_i = f(x_i)的行为不会对下一个输入x_{i+1}产生影响。这使得SL非常适合图像分类、语音识别等任务,但在闭环控制中存在根本性缺陷。 -
模仿学习 (Imitation Learning):其目标是学习一个策略
π: S → A(从状态空间到动作空间)。它的训练数据是序列数据τ = {s_0, a_0, s_1, a_1, ...},其中s_{t+1}是由(s_t, a_t)决定的。数据之间存在时序依赖,不满足I.I.D.假设。IL要解决的是一个序贯决策问题 (Sequential Decision-Making Problem),这才是控制问题的本质。简单地将控制看作“在每个状态下做一次分类/回归”,是SL对控制问题的误用。
模仿学习 (IL):从专家范例中归纳策略
底层问题定义:以监督学习为工具,解决序贯决策问题
最基础的IL算法,行为克隆 (Behavioral Cloning, BC),形式上看起来极像监督学习。它收集专家演示数据集 D = {(s_i, a_i)},然后通过最小化一个监督损失(如MSE)来训练策略网络 π_θ:
L(θ) = E_{(s,a)∼D} [ ||π_θ(s) - a||^2 ]
尽管工具是SL,但其意图是学习一个能在闭环中运行的策略。这直接引出了IL的核心挑战:
核心挑战:分布偏移 (Covariate Shift / Distribution Mismatch)
- 问题根源:BC训练的策略
π_θ是在专家访问过的状态分布p_expert(s)上进行优化的。然而,由于策略网络π_θ不可能完美复刻专家策略π*,在实际执行中,它会犯下微小的错误。这个错误会引导智能体进入一个新的状态s',而这个状态在专家数据集D中出现的概率极低(即p_expert(s') ≈ 0)。 - 恶性循环:在这些分布外 (Out-of-Distribution) 的状态上,
π_θ的行为是未定义的,很可能输出一个更糟糕的动作,导致智能体进一步偏离专家轨迹。这个过程形成误差累积,最终导致任务失败。
解决方案示例:DAgger (Dataset Aggregation)
DAgger是解决分布偏移的经典在线IL算法。其思路是让策略在训练中“见到”自己会犯错的状态:
- 初始阶段:用专家数据
D训练一个初始策略π_1。 - 迭代过程 (for i = 1, 2, …):
a. 执行:用当前策略π_i在环境中执行,收集其访问的状态轨迹{s_t}。
b. 查询:对于收集到的每个状态s_t,向在线的专家查询此时应采取的正确动作a_t* = π*(s_t)。
c. 聚合:将新收集到的数据对{(s_t, a_t*)}聚合到原始数据集D中。
d. 再训练:用聚合后的新数据集D重新训练策略,得到π_{i+1}。
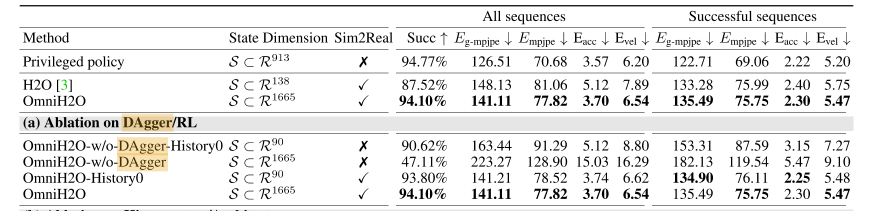
DAgger的本质是将问题从“模仿专家做什么”转变为“学习如何在自己会到达的状态下,做出专家会做的决策”,从而有效缓解了分布偏移,典型的论文例如OmniH2O,在里面大量讨论了Dagger加入后产生的影响。
强化学习 (RL):从标量奖励中发现策略
底层问题定义:最大化期望累积奖励的马尔可夫决策过程 (MDP)
RL彻底抛弃了专家演示,它的唯一监督信号是一个人为设计的标量奖励函数 r(s, a)。RL将控制问题建模为一个MDP,其目标是寻找一个策略 π,以最大化折扣累积奖励的期望:
J(π) = E_{τ∼π} [ Σ_{t=0}^∞ γ^t * r(s_t, a_t) ]
-
学习信号的差异:这是RL与IL的根本区别。IL的监督信号是高维、稠密的专家动作向量
a*,它直接告诉策略“该做什么”。而RL的监督信号是低维、通常稀疏的奖励标量r,它只告诉策略当前行为的“好坏程度”,而不提供具体修正方向。 -
探索-利用困境 (Exploration-Exploitation Dilemma):由于没有专家指引,RL智能体必须通过探索 (Exploration) 来尝试新的动作以发现潜在的高奖励区域,同时也要利用 (Exploitation) 已知的最佳策略来获取奖励。平衡二者是RL算法设计的核心。
RL的强大之处在于,它不被专家知识所束缚,有可能通过探索发现超越人类直觉的、性能更高的策略。其代价是巨大的样本复杂度和对奖励函数设计的敏感性。
核心挑战:奖励函数设计的难度和样本效率的低下
奖励函数的设计稍有不慎,智能体就可能“钻空子”,学会以投机取巧的方式最大化奖励,而非完成任务本身。此外,RL需要天文数字般的交互数据才能学到有效策略,这使得训练过程高度依赖于高速、高保真的模拟环境,从而还产生了业界一直致力于攻克的sim2real难题。
四、范式解构与比较
下表从技术底层对三大范式进行归纳:
| 范式 | 核心问题公式化 | 知识/监督来源 (“Oracle”) | 技术优势 | 技术瓶颈 |
|---|---|---|---|---|
| MPC+WBC | 有限时域约束优化 | 精确的、可微的系统动力学模型 f(x, u) | 在模型可信域内,提供最优性、安全性和可解释性保证。 | 对模型失配极其敏感;高维非凸优化求解耗时。 |
| 模仿学习 (IL) | 序贯决策问题,用监督学习求解 | 专家策略 π* 提供的状态-动作对 (s, a*) | 无需设计奖励函数;可学习人类的复杂、隐式技能;样本效率相对较高。 | 性能上限受限于专家水平;核心挑战是分布偏移。 |
| 强化学习 (RL) | 马尔可夫决策过程 (MDP) | 人工设计的奖励函数 r(s, a) | 能够发现超人类性能的策略;无需专家数据。 | 奖励函数设计困难(易导致Reward Hacking);样本效率极低;探索成本高。 |
通过以上解构,我们可以清晰地看到:
- MPC+WBC 是一个在“已知世界”中追求“确定性最优”的范式。
- IL 是一个在“专家经验”中学习“行为范式”的范式。
- RL 是一个在“未知环境”中通过“试错反馈”寻找“概率性最优”的范式。
它们并非相互替代,而是针对不同问题假设的工具。未来的高级人形机器人控制系统,几乎必然是这些范式的混合体,现在的研究方向也基本在混合控制上进行探索。

















 365
365

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









