







1.旋转变化
1.1旋转矩阵的意义
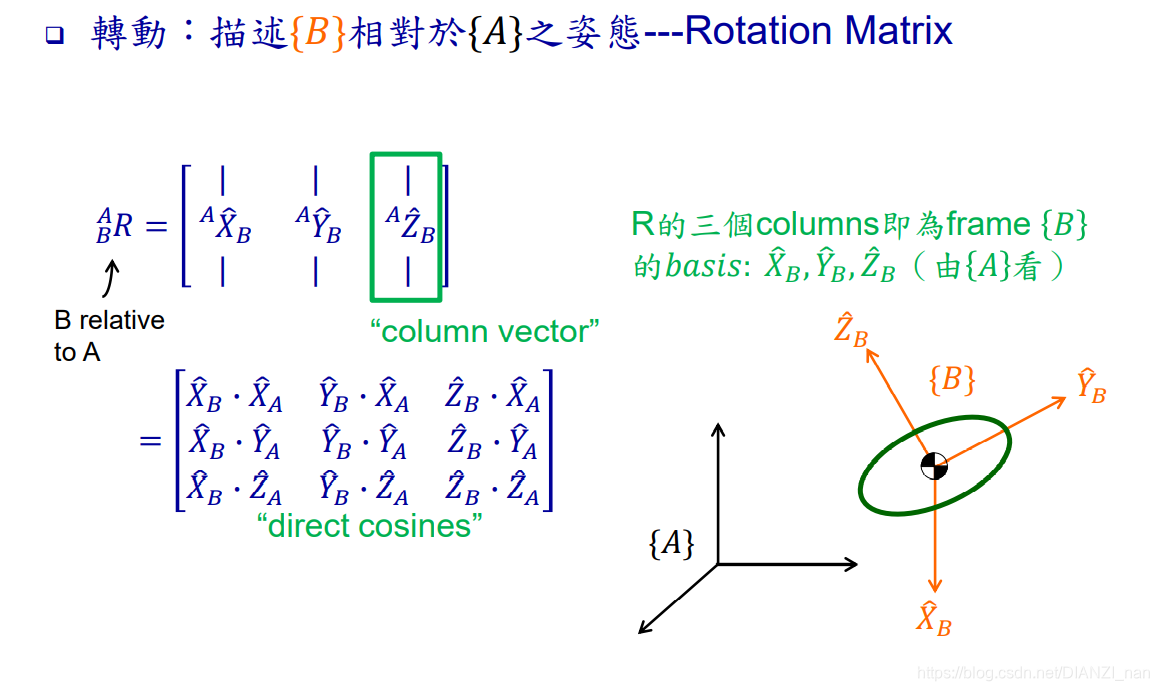
矩阵意义:每一列都是Xb / Yb / Zb在A的各个主轴的投影。 点乘的物理意义就是投影
实际上如果按照每一列看的话,那么就是Xa / Ya / Za在B的各个主轴上投影。
物理意义:描述的是B相对于A的旋转变化,也就是说A->B的旋转矩阵。
同时也代表了body-frame的姿态
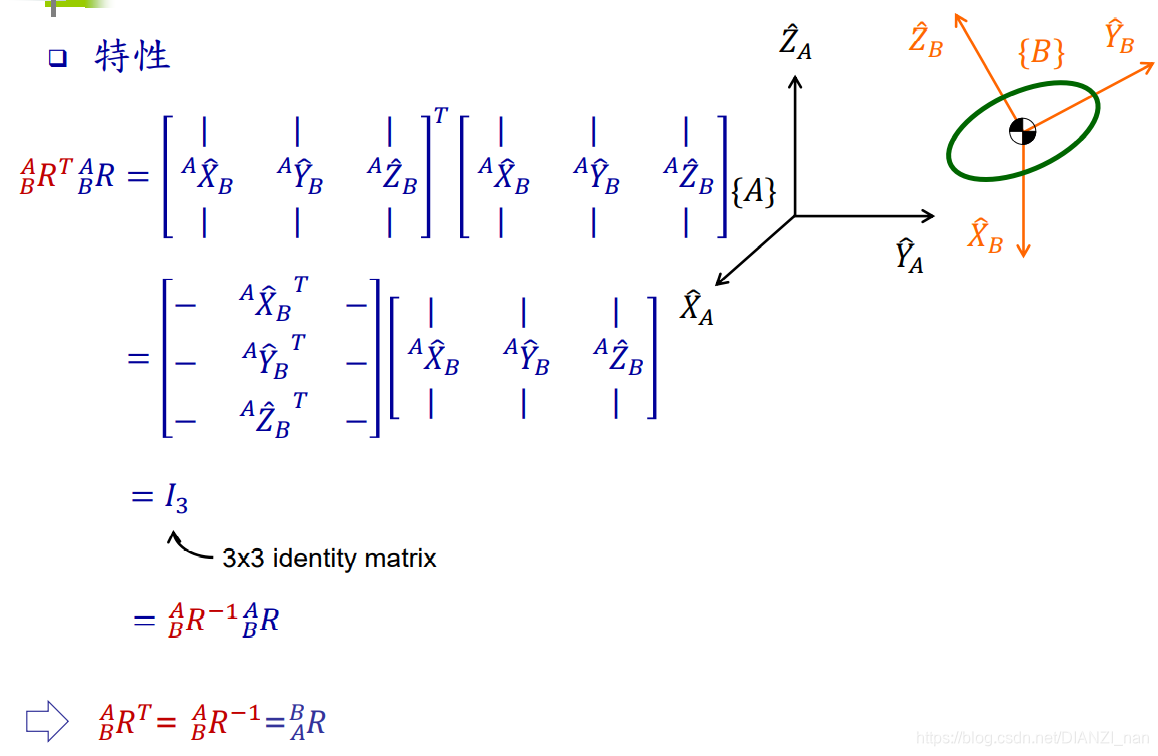
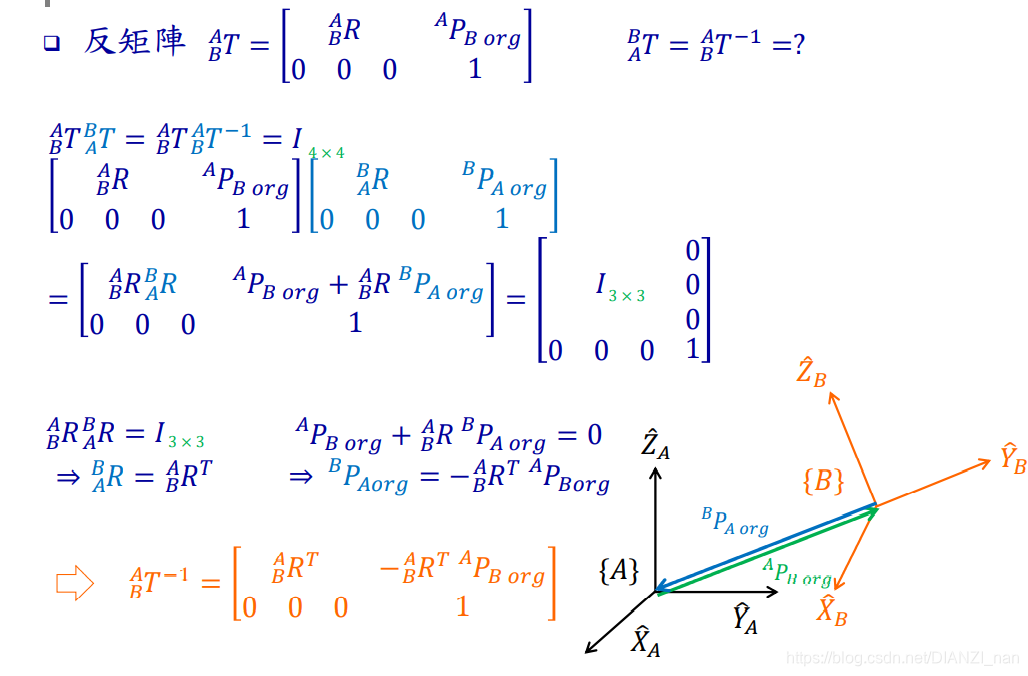
旋转矩阵R是一个正交阵,就也就是说,每列都是单位向量,且互相正交。其逆矩阵为R的转置。
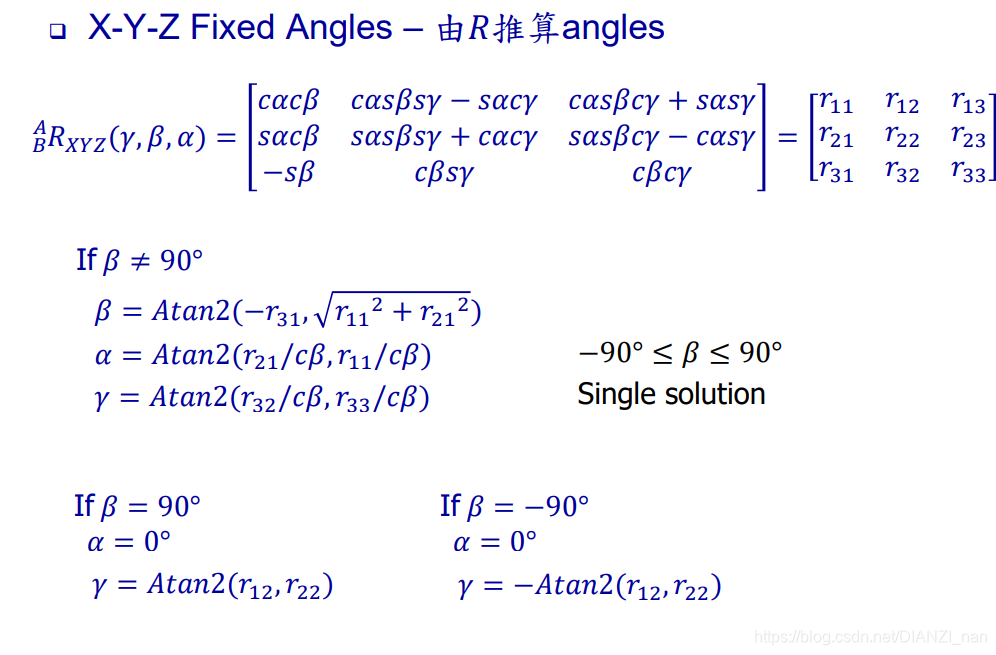
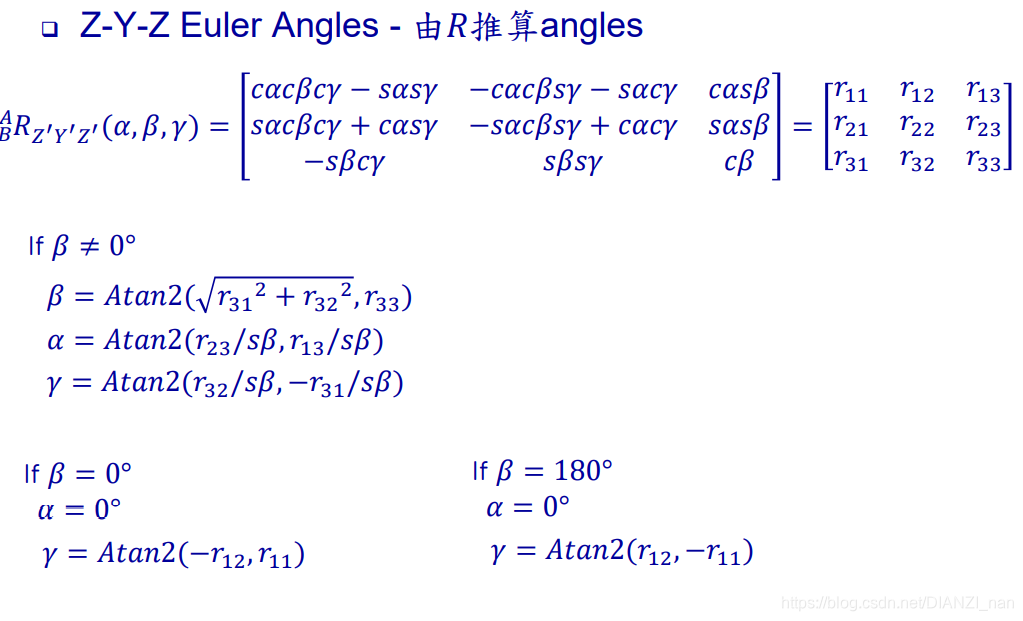
R有9个数字,但是由于两个限制条件(模长和相互正交)引入了6个约束。因此只有3个自由度,即为绕各个轴的旋转角
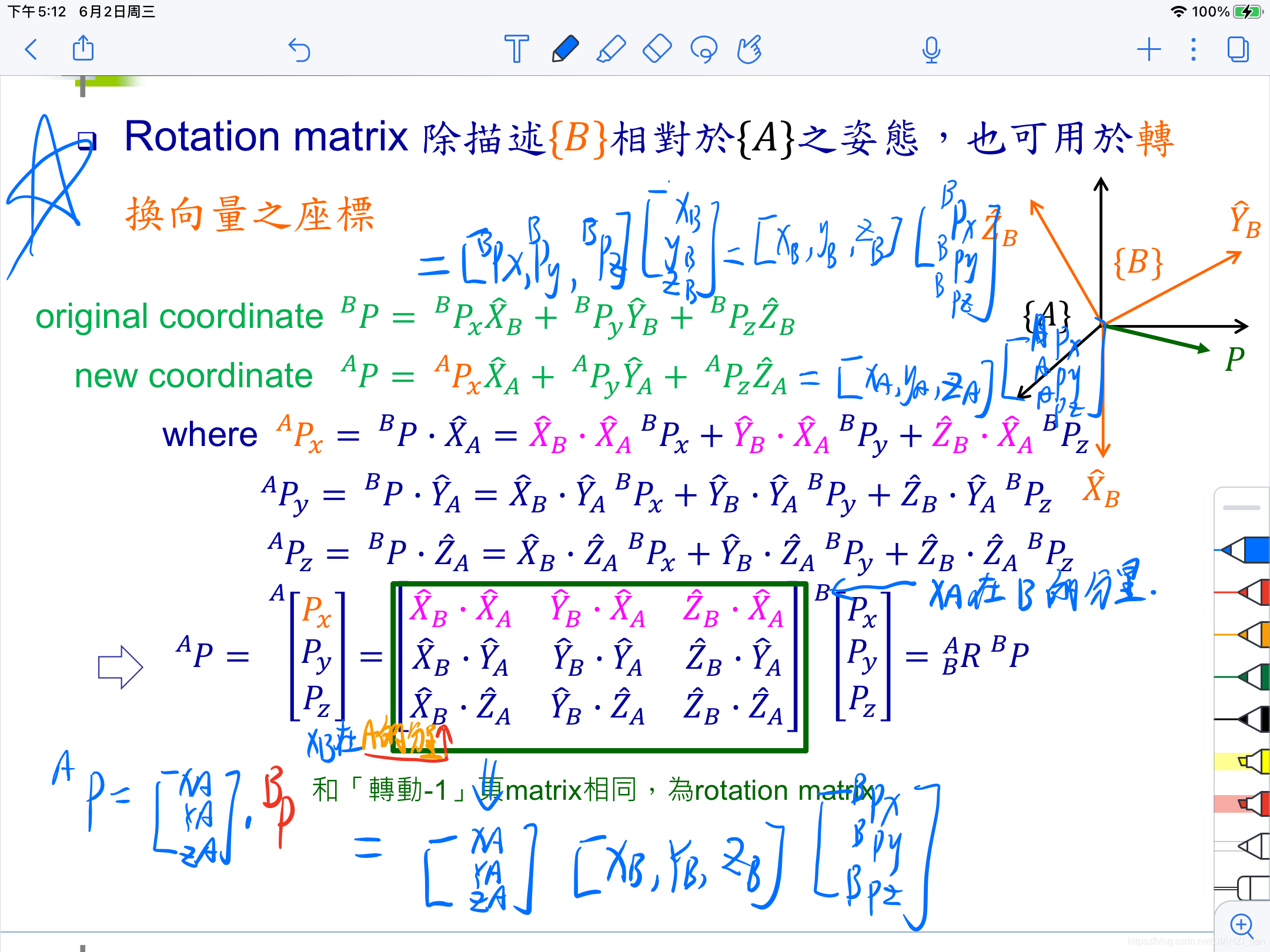
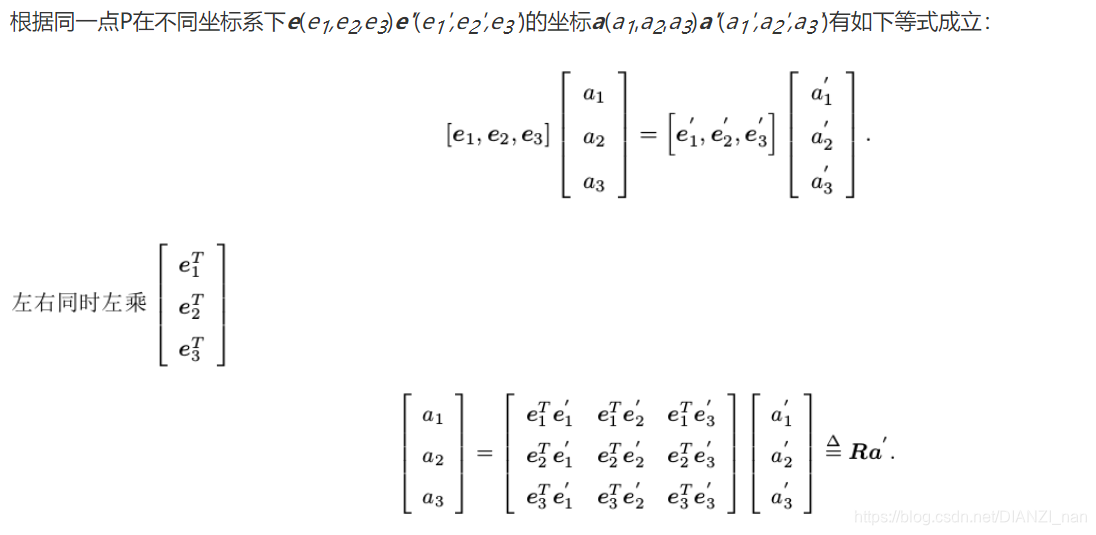
1.2坐标转换(基底变换)
题目:已知在B坐标系中的坐标Pb,求在A坐标系中的坐标Pa
思想:将向量Pb投影到A坐标系的基底中,这样求出A中各个基底的分量长度。
结论:
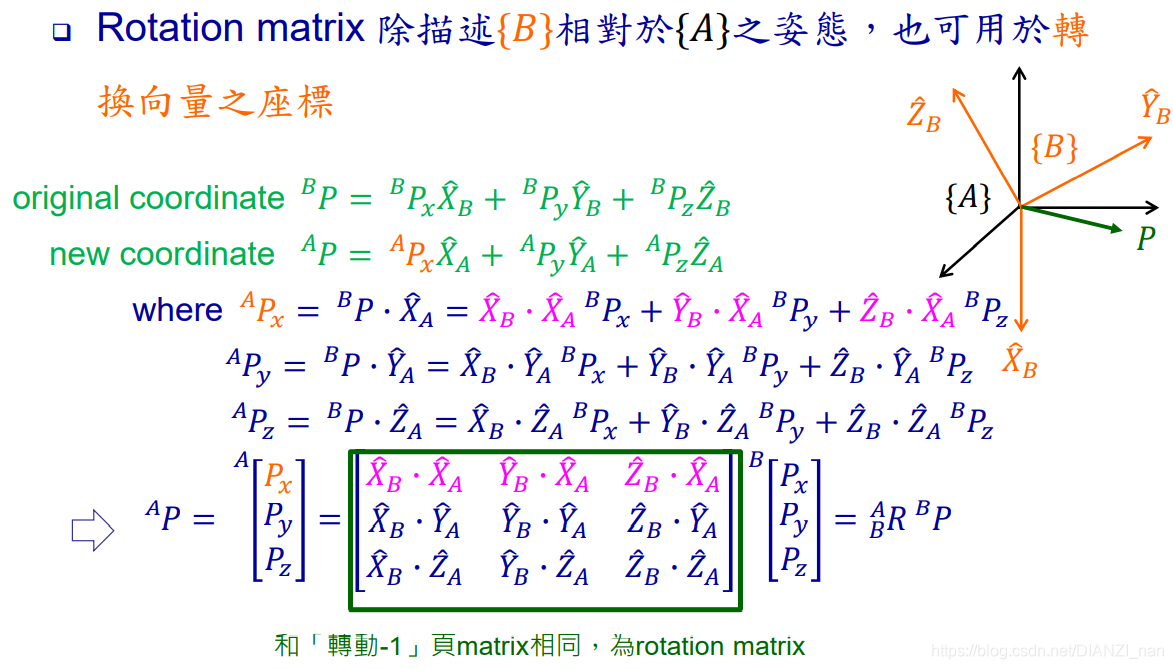
观察上式中每行代表的含义,例如(Px|A)其实就是将Xb,Yb,Zb在Xa的分量全部统计在一起,最后得出向量Pb在A中Xa的分量。
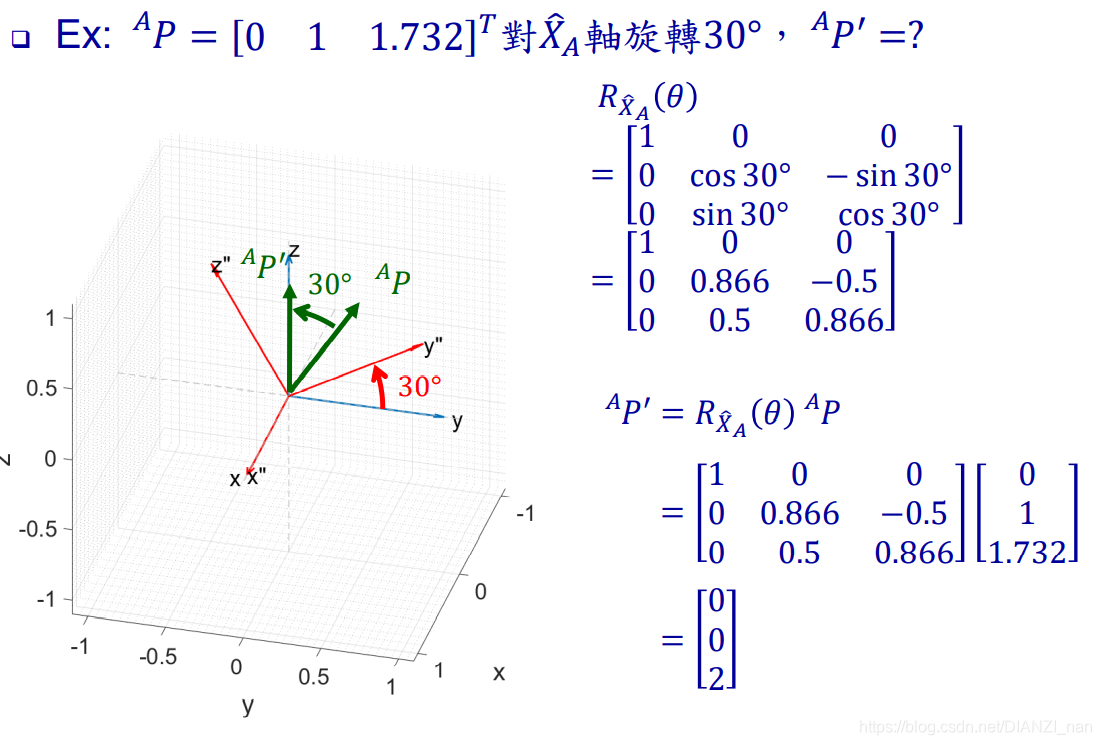
1.3坐标转换(同一坐标系)
同一坐标系中,经过旋转变换后的点,坐标变化关系为:
1.4旋转矩阵总结
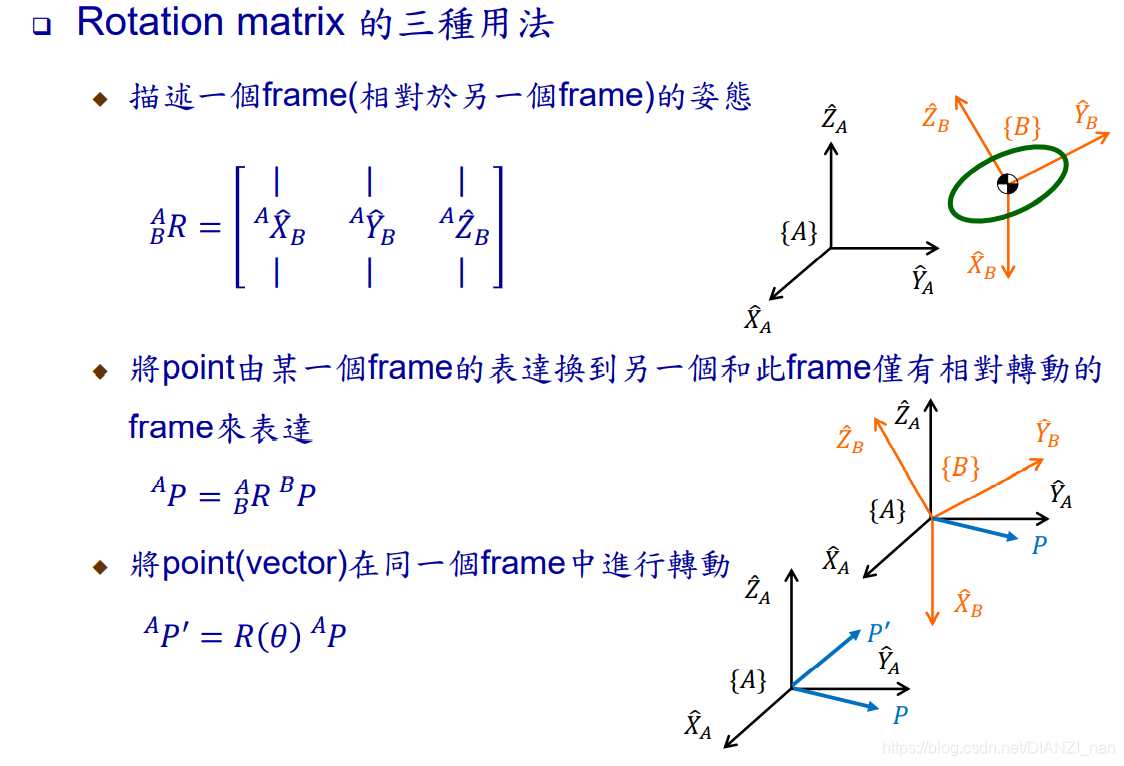
1.旋转矩阵的含义:旋转后的轴在原本轴的投影
2.同一点在不同坐标系中的变化关系:
3.同一坐标系中点经过旋转变化的关系为:
2.旋转变换的计算
2.1固定轴旋转
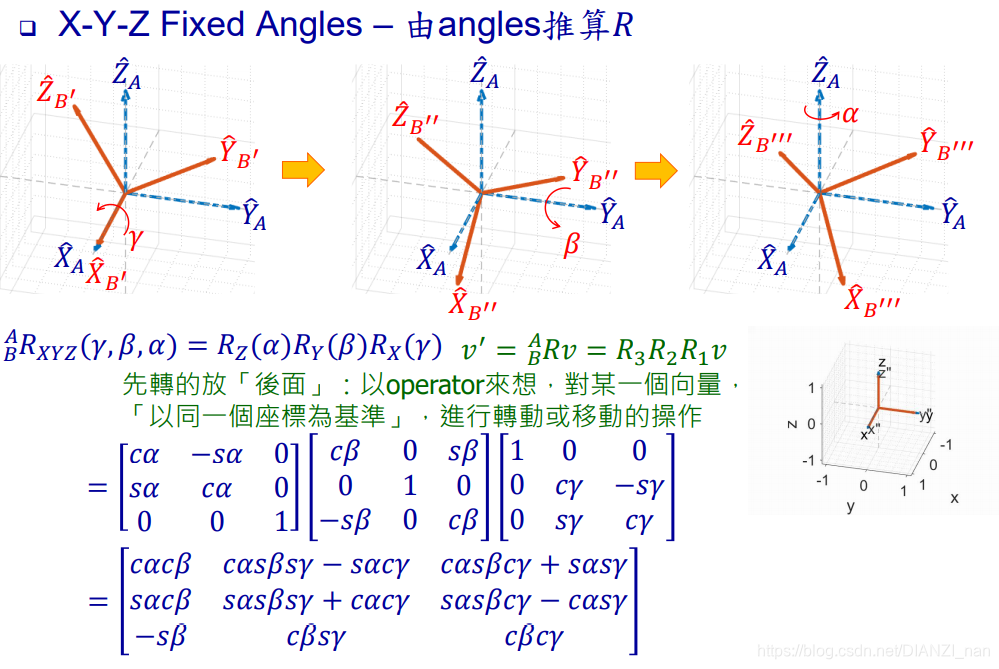
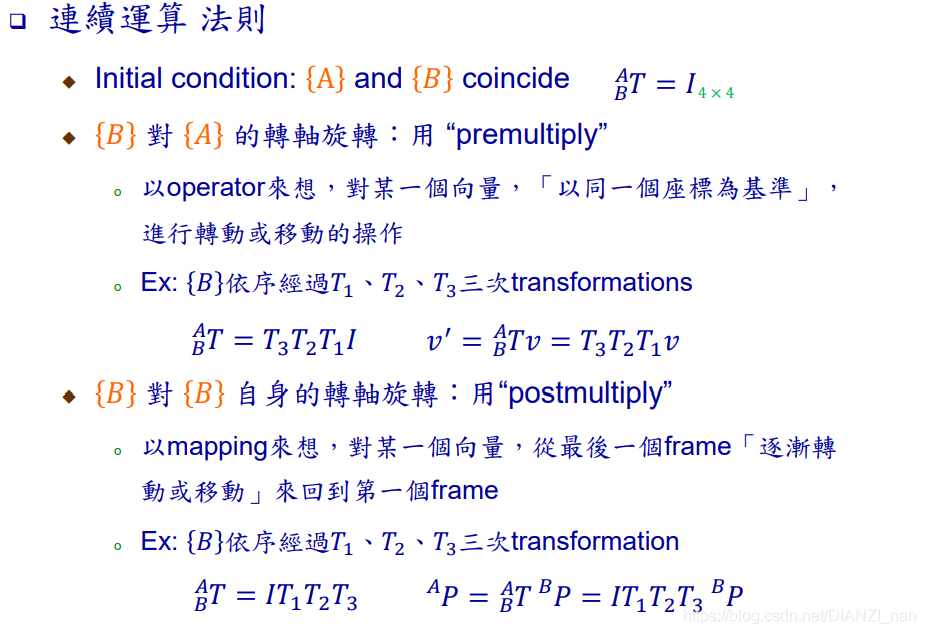
在固定坐标系中,连续变换应该当作旋转算子来看待,每经过一次旋转就左乘一次旋转矩阵
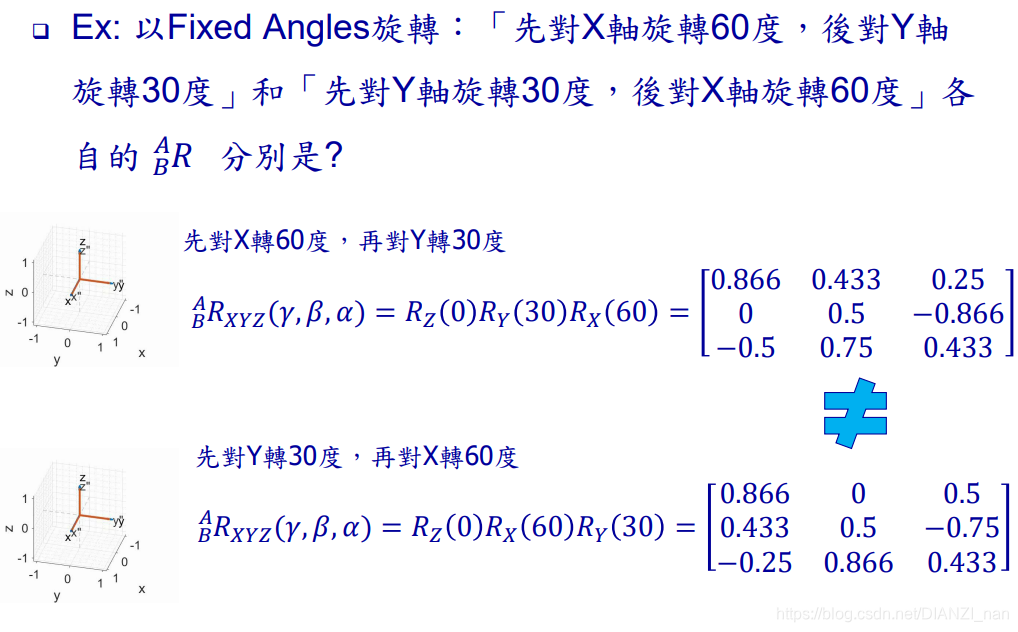
另外一个理解方式是:矩阵计算不具备交换性
2.2相对轴旋转
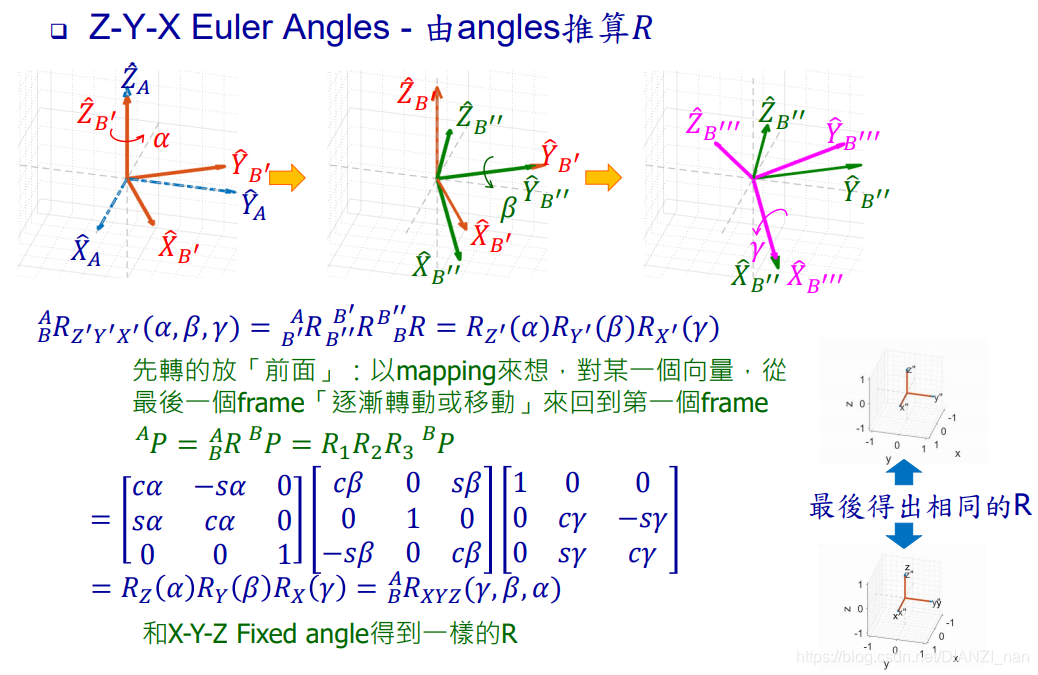
对于相对轴的连续变换可以看作是连续的映射,只能由最后一帧逐渐转回到第一帧。
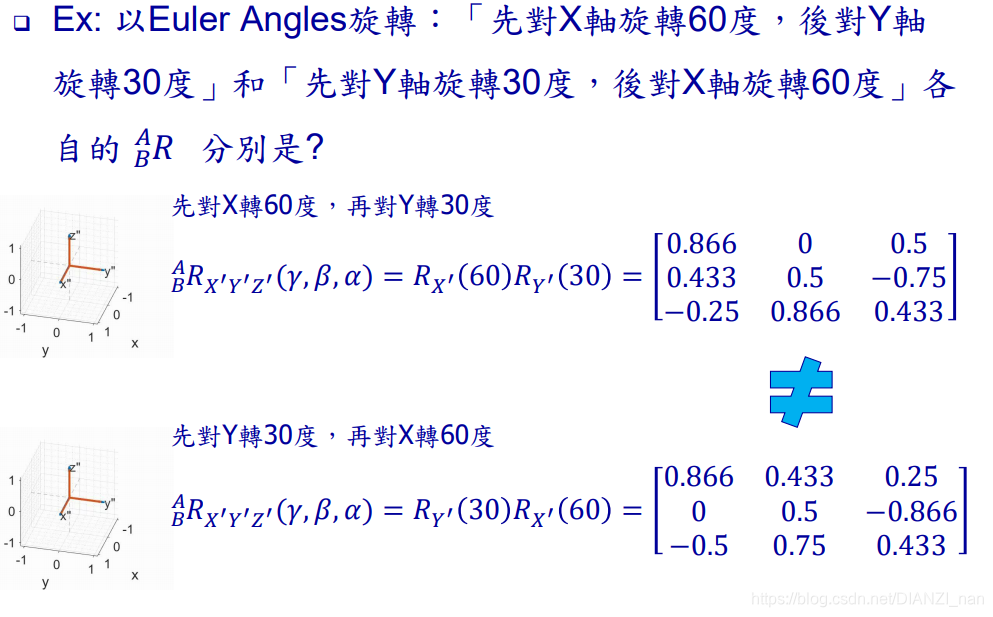
先后顺序不一致,结果不一致
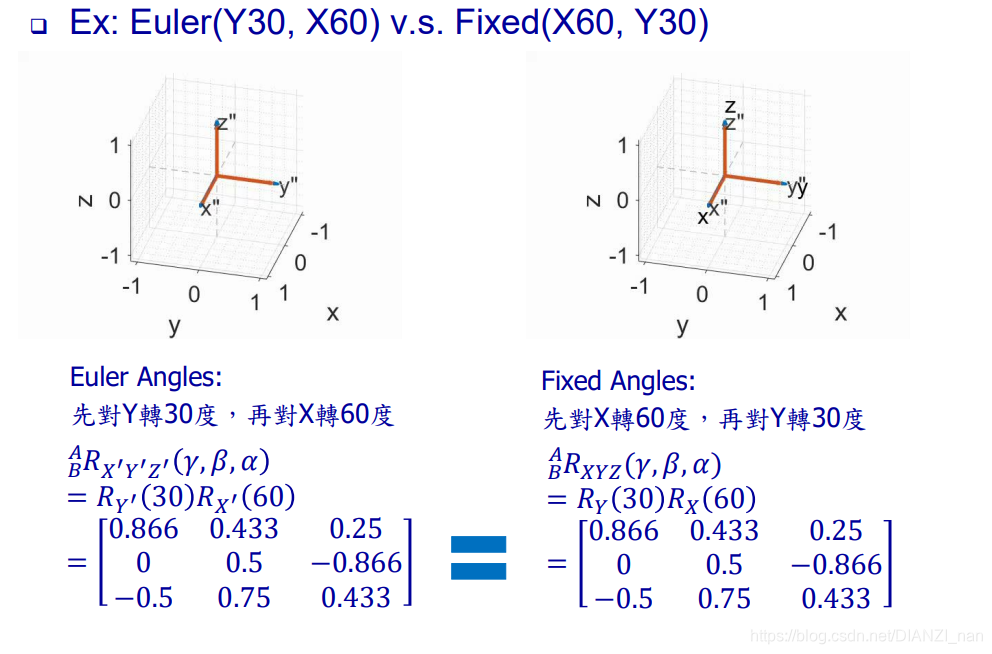
固定轴和相对轴相同旋转,结果一样。
3.刚体运动表示
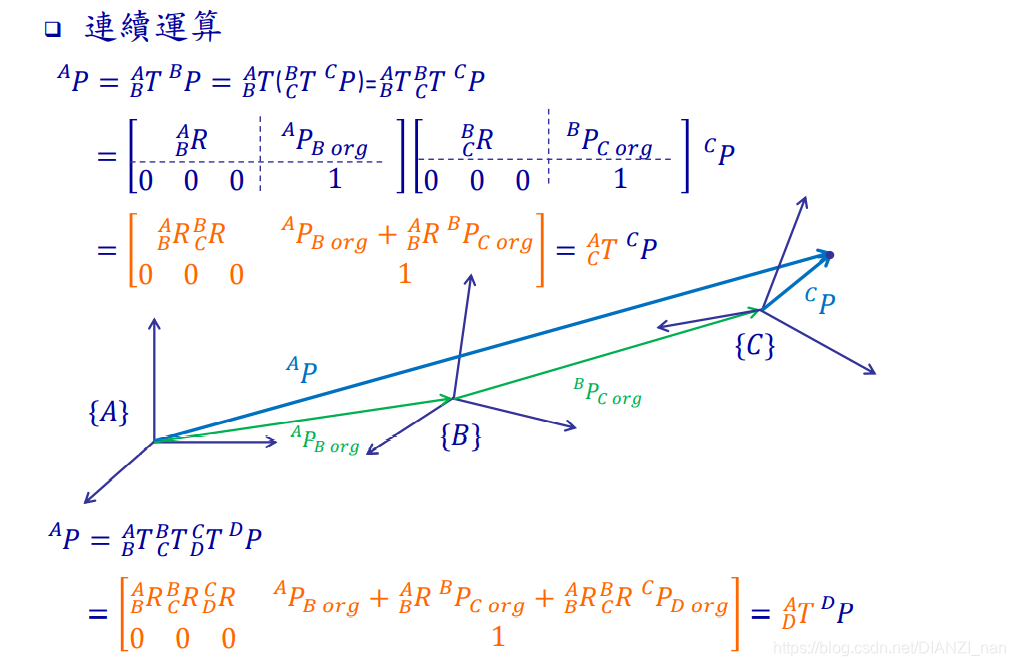
3.1Mapping(映射)【相对坐标系】
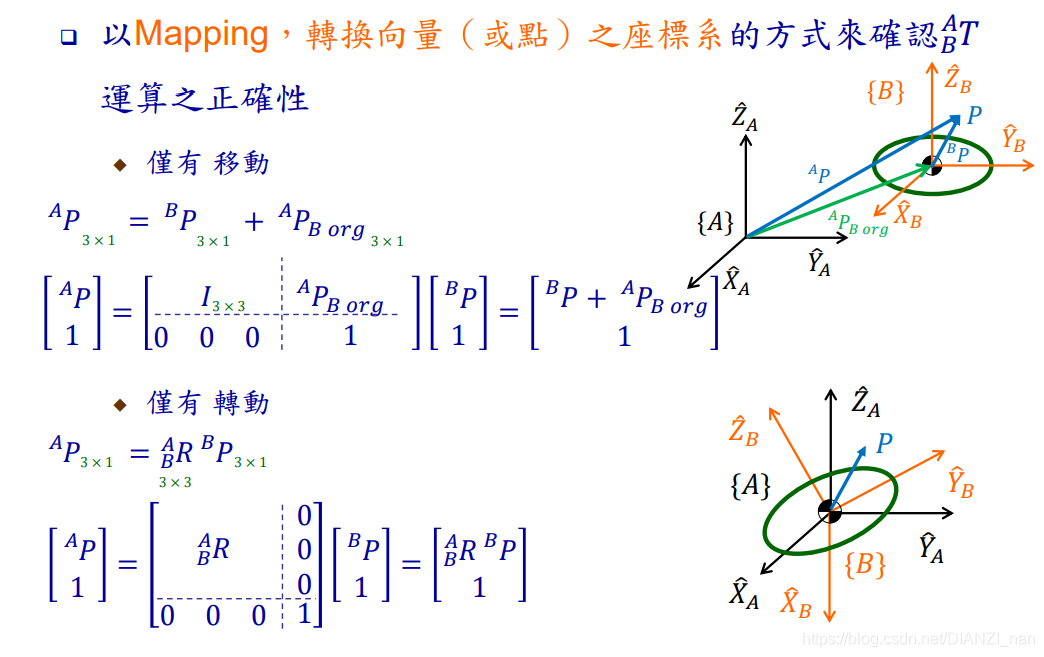
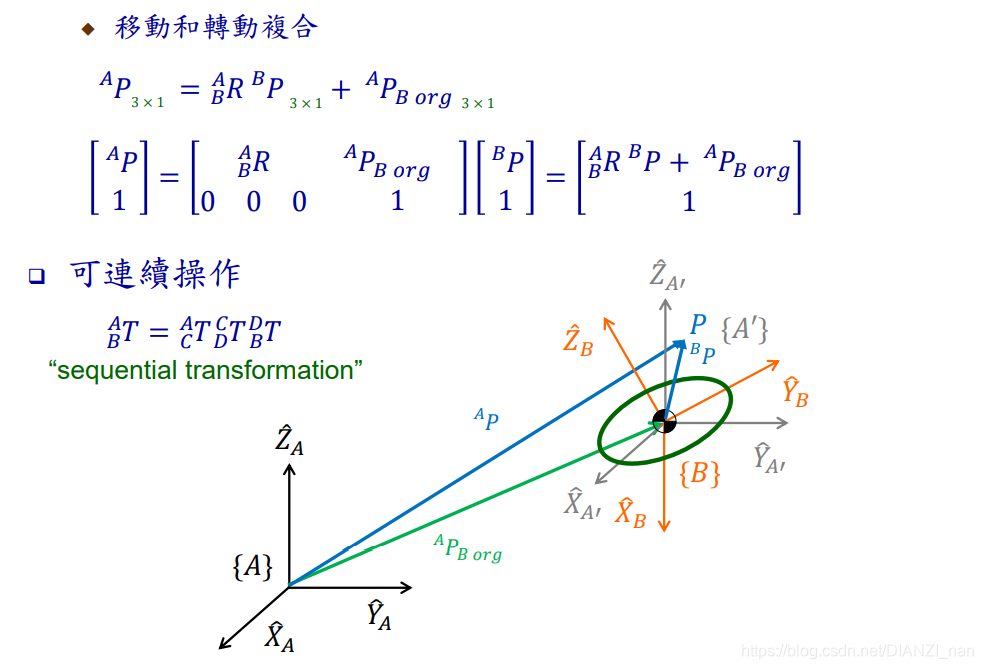
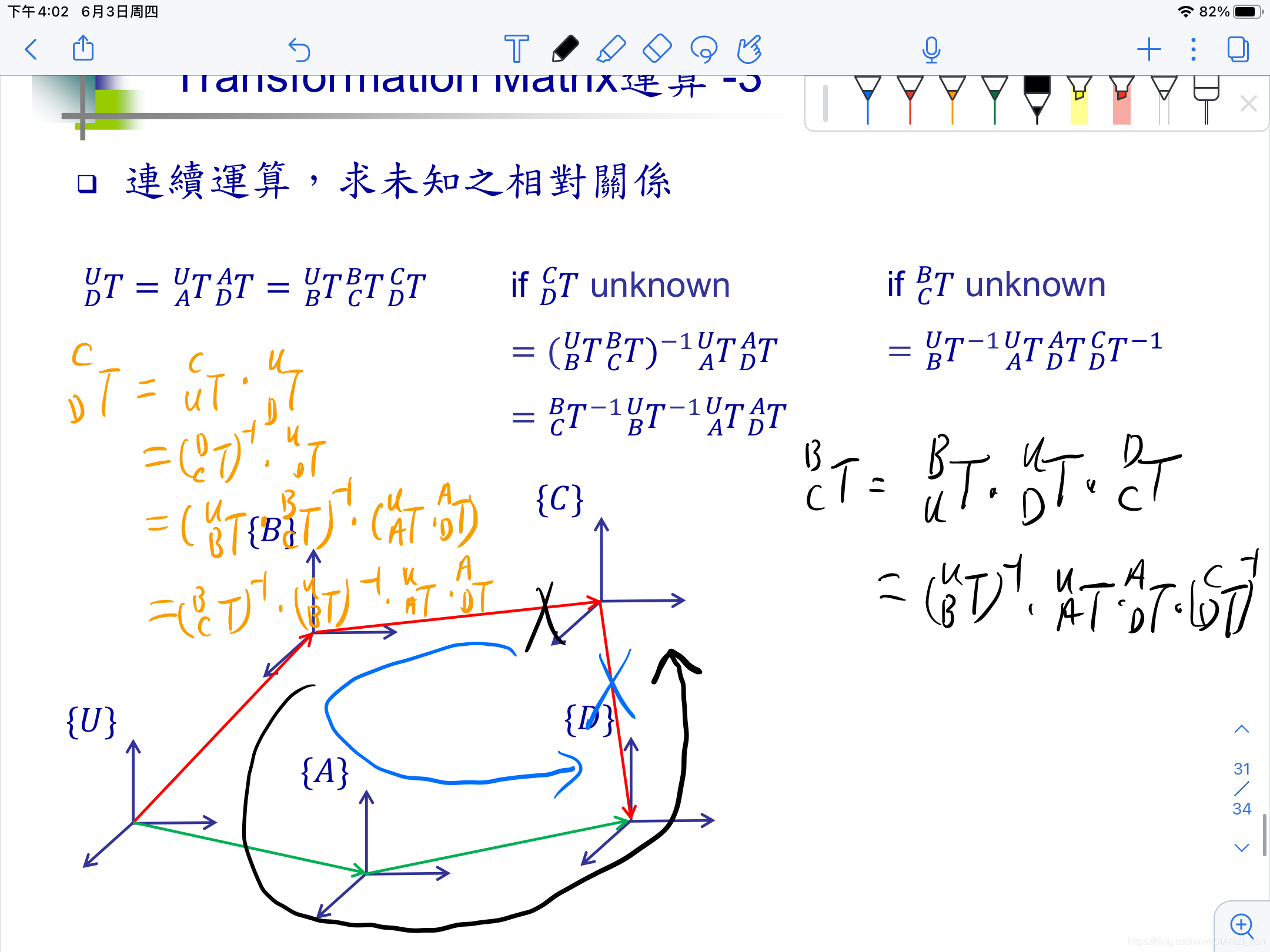
注意:连续变换的时候是依据相对轴变换的关系计算的 【转动移动的先后顺序应该是没有区别的】
3.2Operators(旋转算子)【固定坐标系】
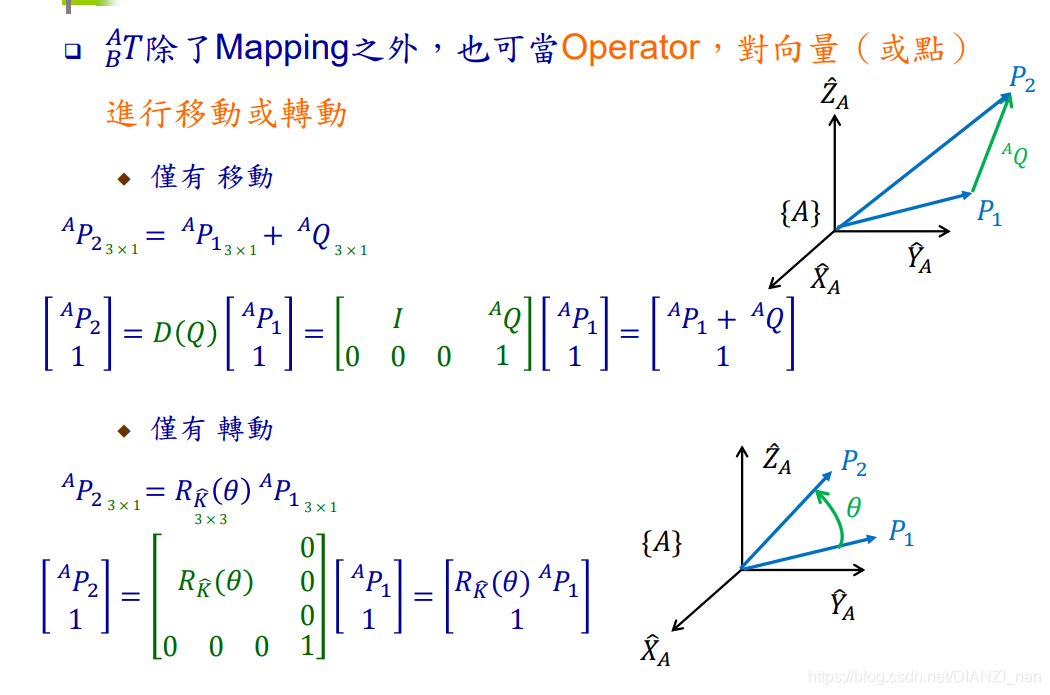
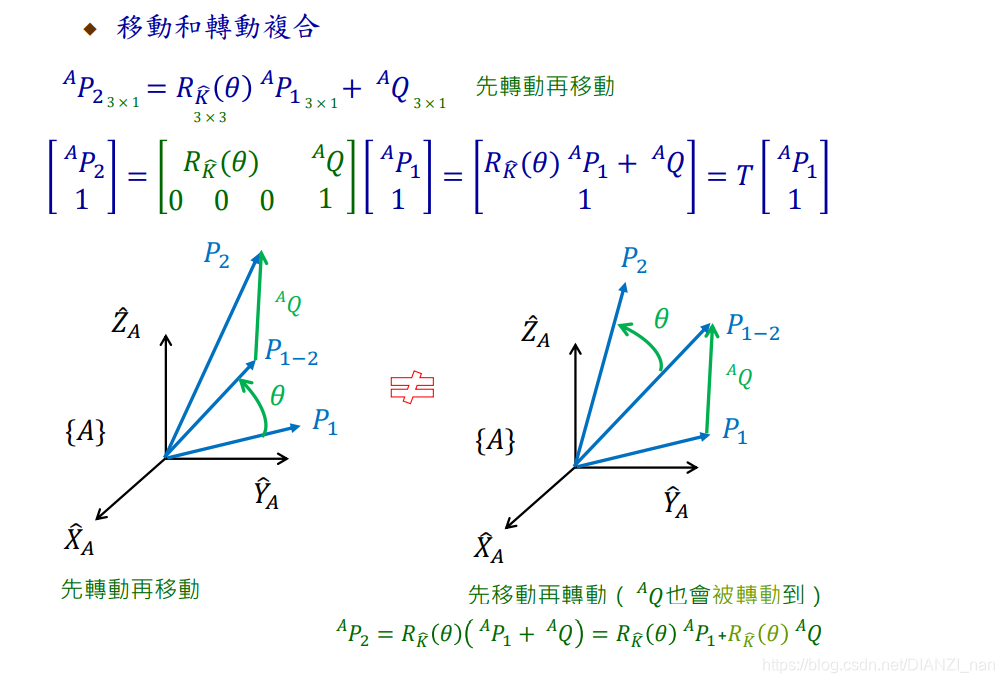
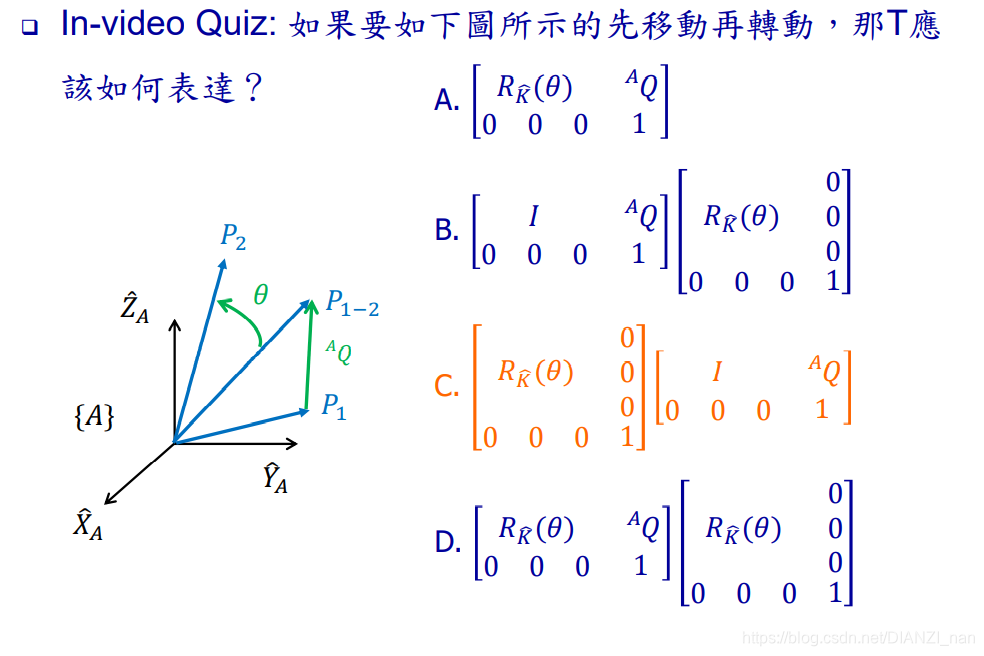
注意:默认是先旋转后移动,如果先移动后旋转的话,移动向量也会被旋转
3.3齐次变换矩阵小结
参考资料
台大机器人学之运动学 https://www.bilibili.com/video/BV1v4411H7ez?p=16&spm_id_from=pageDriver

















 393
393

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









