






Deep Depth, Deep Pose and Deep Uncertainty for Monocular Visual Odometry
论文链接
摘要:
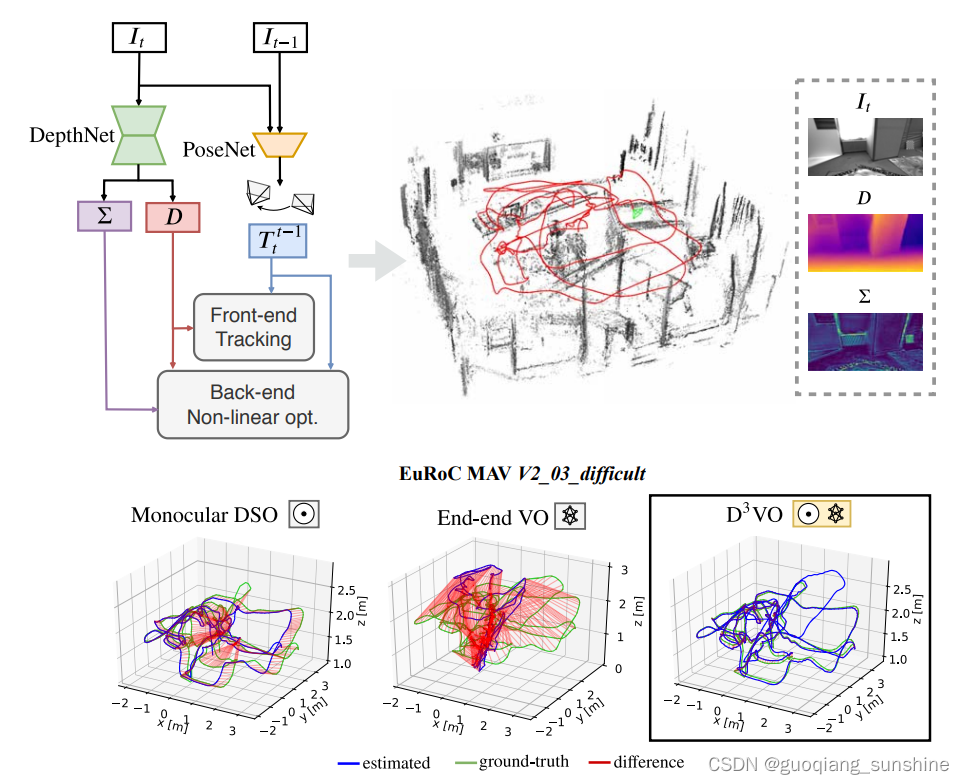
提出的D3VO单目视觉里程计框架从三个层面上利用了深度学习网络,分别是:利用深度学习的深度估计,利用深度学习的位姿估计,利用深度学习的不确定度估计。首先我们提出了一个在双目视频上训练得到的自监督单目深度估计网络。特别的,它利用预测亮度变换参数,将训练图像对对齐到相似的亮度条件上。另外,我们建模了输入图像像素的亮度(photometric uncertainties)不确定性,从而进一步提高深度估计的准确率,并为之后的直接法视觉里程计提供一个关于光照残差的可学习加权函数。评估结果显示,我们提出的网络超过了当前的sota自监督深度估计网络。D3VO将预测深度,位姿以及不确定度紧密结合到一个直接视觉里程计方法中,来同时提升前端追踪以及后端非线性优化性能。结果显示,D3VO大大超越了传统的sota视觉里程计方法。同时,在EuRoC MAV数据集上和sota的VIO可比较的结果。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











