






基于驾驶员风格的自适应巡航算法设计,Prescan和Simulink联合仿真,涉及到上层跟车策略,期望跟着加速度,基于聚类拟和的加速度的控制算法,下层逆动力学模型。
智能驾驶
ID:54199673053391440
智驾小崔
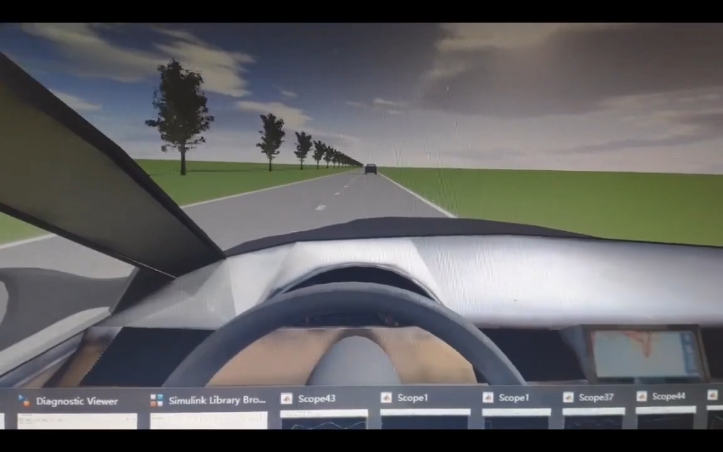
智能驾驶的兴起是当下汽车行业的热门话题,无论是自动驾驶技术的发展还是驾驶员辅助系统的研究,都旨在提高驾驶安全性和乘坐舒适度。在智能驾驶技术中,自适应巡航控制算法是至关重要的一环。本文将介绍基于驾驶员风格的自适应巡航算法设计,并结合Prescan和Simulink进行联合仿真,涉及到上层跟车策略、期望加速度以及基于聚类拟合的控制算法,同时还会讨论下层逆动力学模型的应用。
自适应巡航控制算法的设计是智能驾驶技术中的核心问题之一。在传统的巡航控制中,车辆会根据驾驶员预设的速度进行巡航。然而,在实际驾驶中,驾驶员的驾驶风格和现实道路条件会导致车速的波动性。因此,基于驾驶员风格的自适应巡航算法成为了重要的研究方向。
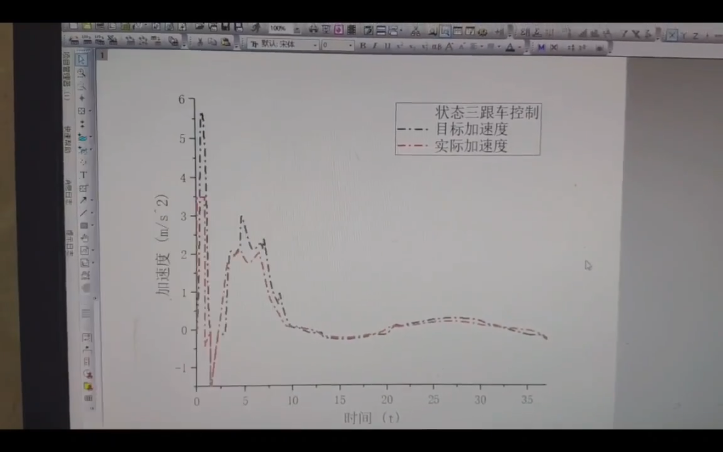
在自适应巡航算法中,上层跟车策略起着关键作用。通过对前方车辆的距离和速度进行实时监测,系统可以根据驾驶员的需求和道路条件来调整车辆的速度。为了更好地满足驾驶员的需求,本文提出了一种基于期望加速度的跟车策略。通过分析驾驶员在不同路况下的行驶习惯和期望加速度的变化规律,系统可以智能地调整巡航速度,提高驾驶舒适性和安全性。
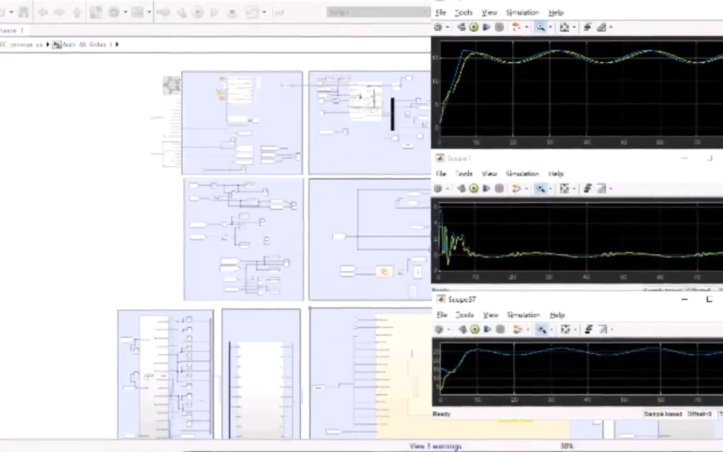
在控制算法设计中,聚类拟合被广泛应用于自适应巡航系统。通过对驾驶员的驾驶数据进行聚类分析,系统可以识别出不同的驾驶风格,并根据驾驶员的特点来调整巡航策略。基于聚类拟合的控制算法可以更准确地预测驾驶员的加速度需求,提供更精准的巡航控制。通过联合使用Prescan和Simulink进行仿真,可以验证算法的可行性和有效性。
另外,下层逆动力学模型也是自适应巡航系统中不可或缺的一部分。通过建立车辆的动力学模型,系统可以更准确地估计车辆的加速度和制动力,并根据实时数据进行调整。下层逆动力学模型为自适应巡航系统提供了更精准的控制基础,提高了系统的稳定性和响应速度。
综上所述,基于驾驶员风格的自适应巡航算法设计在智能驾驶技术中扮演着重要角色。通过联合使用Prescan和Simulink进行仿真,我们可以验证算法的可行性和有效性。上层跟车策略、期望加速度以及基于聚类拟合的控制算法都是实现自适应巡航的关键环节。此外,下层逆动力学模型的应用可以提高系统的稳定性和控制精度。通过不断的研究和改进,我们可以使智能驾驶技术更加成熟,为人们提供更安全、更舒适的驾驶体验。
相关的代码,程序地址如下:http://wekup.cn/673053391440.html
















 6584
6584











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









