









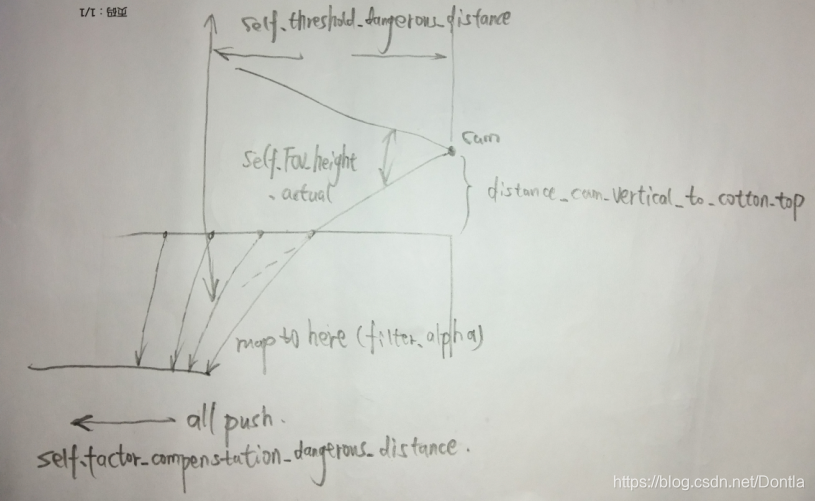
原理图
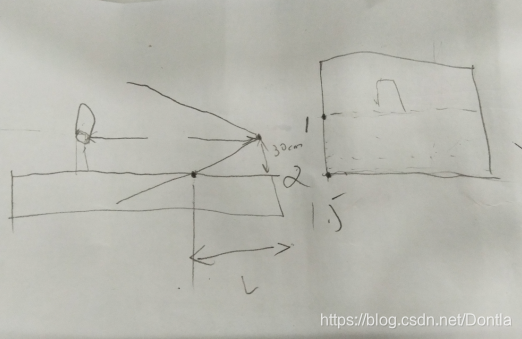
相关代码
# -*- coding: utf-8 -*-
"""
@File : 191224_obstacle_detection_建立梯度.py
@Time : 2019/12/24 14:51
@Author : Dontla
@Email : sxana@qq.com
@Software: PyCharm
"""
import time
import numpy as np
import pyrealsense2 as rs
import cv2
import sys
from numba import jit
# @jit
# 貌似开不了jit,不知啥原因,开了也没明显看到加速
def filter_alpha(depth_image, filter_alpha):
if filter_alpha > 1:
# 获取depth_image宽高
h, w = depth_image.shape[0], depth_image.shape[1] # 360,640
# 创建上下alpha(不同方法都能创建)
# filter_upper = np.array([1] * int(h / 2))
filter_upper = np.full(int(h / 2), 1)
filter_lower = np.linspace(1, filter_alpha, h / 2)
# 将filter_upper和filter_lower连在一起
filter = np.r_[filter_upper, filter_lower]
# print(filter)
# print(filter.shape) # (360,)
# print(filter_alpha_upper)
# print(filter_alpha_upper.shape) # (180,)
# print(filter_alpha_lower)
# print(filter_alpha_lower.shape) # (180,)
return (depth_image.T * filter).T
else:
return depth_image
# 如果要防止下面cotton过近被误探测,可用两层for循环设置梯度过滤
# 不过貌似还得中间对半分,下面直接舍弃掉,只用上面作为判断,因为就算下面用了梯度...(还是得用梯度...)
@jit
def traversing_pixels(depth_image, threshold_dangerous_distance):
num_dangerous = 0
num_all_pixels = 0
depth_image_ravel = depth_image.ravel()
# depth_image_segmentation为分割后的图像(红蓝两色)
depth_image_segmentation_ravel = []
for pixel in depth_image_ravel:
num_all_pixels += 1
# 第一种效果要好一些
if pixel < threshold_dangerous_distance and pixel != 0:
# if pixel < threshold_dangerous_distance:
num_dangerous += 1
depth_image_segmentation_ravel.append(0)
else:
depth_image_segmentation_ravel.append(6000)
depth_image_segmentation = np.array(depth_image_segmentation_ravel).reshape(depth_image.shape)
return num_all_pixels, num_dangerous, depth_image_segmentation
class ObstacleDetection(object):
def __init__(self):
# self.cam_serials = ['838212073161', '827312071726']
# self.cam_serials = ['838212073161', '827312071726', '838212073249', '827312070790', '836612072369',
# '826212070395']
self.cam_serials = ['838212073161']
self.cam_width, self.cam_height = 640, 360
# 【危险距离:单位mm】
self.threshold_dangerous_distance = 3000
# 【摄像头到cotton平面垂直距离(单位mm)】
self.distance_cam_vertical_to_cotton_top = 260
# 【危险距离补偿系数】用于让最下面深度远离临界值,避免造成误检测
self.factor_compensation_dangerous_distance = 1.5
# 【危险距离像素占比】
self.threshold_dangerous_scale = 0.05
# 【摄像头视场角(单位°)】
self.FOV_width = 69.4
self.FOV_height = 42.5
self.FOV_scale = self.FOV_height / self.FOV_width # 0.6123919308357348
# 【实际变换后height视场角】
if self.cam_height / self.cam_width < self.FOV_scale:
self.FOV_height_actual = self.FOV_width * self.cam_height / self.cam_width
else:
self.FOV_height_actual = self.FOV_height
# 【计算过滤α值(distance_min为图像最下方的深度,看到最近cotton的距离)】
# 当摄像头到cotton顶垂直距离为800,最小距离为2256,当危险距离为2000时,alpha滤值为0.88
# 当摄像头到cotton顶垂直距离为800,最小距离为2256,当危险距离为3000时,alpha滤值为1.32
# 所以,后面进行滤值时需判断self.filter_alpha的值是否大于1(已添加进filter_alpha()函数中)
self.distance_min = self.distance_cam_vertical_to_cotton_top / (
np.tan(self.FOV_height_actual / 2 * np.pi / 180))
self.filter_alpha = self.threshold_dangerous_distance / self.distance_min * self.factor_compensation_dangerous_distance
def obstacle_detection(self):
# print(self.distance_min) # 2256.7829632201597
# print(self.filter_alpha) # 0.8862172537611853
# 摄像头个数(在这里设置所需使用摄像头的总个数)
cam_num = 6
ctx = rs.context()
'''连续验证机制'''
# D·C 1911202:创建最大验证次数max_veri_times;创建连续稳定值continuous_stable_value,用于判断设备重置后是否处于稳定状态
max_veri_times = 100
continuous_stable_value = 5
print('\n', end='')
print('开始连续验证,连续验证稳定值:{},最大验证次数:{}:'.format(continuous_stable_value, max_veri_times))
continuous_value = 0
veri_times = 0
while True:
devices = ctx.query_devices()
connected_cam_num = len(devices)
print('摄像头个数:{}'.format(connected_cam_num))
if connected_cam_num == cam_num:
continuous_value += 1
if continuous_value == continuous_stable_value:
break
else:
continuous_value = 0
veri_times += 1
if veri_times == max_veri_times:
print("检测超时,请检查摄像头连接!")
sys.exit()
'''循环reset摄像头'''
# hardware_reset()后是不是应该延迟一段时间?不延迟就会报错
print('\n', end='')
print('开始初始化摄像头:')
for dev in ctx.query_devices():
# 先将设备的序列号放进一个变量里,免得在下面for循环里访问设备的信息过多(虽然不知道它会不会每次都重新访问)
dev_serial = dev.get_info(rs.camera_info.serial_number)
# 匹配序列号,重置我们需重置的特定摄像头(注意两个for循环顺序,哪个在外哪个在内很重要,不然会导致刚重置的摄像头又被访问导致报错)
for serial in self.cam_serials:
if serial == dev_serial:
dev.hardware_reset()
# 像下面这条语句居然不会报错,不是刚刚才重置了dev吗?莫非区别在于没有通过for循环ctx.query_devices()去访问?
# 是不是刚重置后可以通过ctx.query_devices()去查看有这个设备,但是却没有存储设备地址?如果是这样,
# 也就能够解释为啥能够通过len(ctx.query_devices())函数获取设备数量,但访问序列号等信息就会报错的原因了
print('摄像头{}初始化成功'.format(dev.get_info(rs.camera_info.serial_number)))
'''连续验证机制'''
# D·C 1911202:创建最大验证次数max_veri_times;创建连续稳定值continuous_stable_value,用于判断设备重置后是否处于稳定状态
print('\n', end='')
print('开始连续验证,连续验证稳定值:{},最大验证次数:{}:'.format(continuous_stable_value, max_veri_times))
continuous_value = 0
veri_times = 0
while True:
devices = ctx.query_devices()
connected_cam_num = len(devices)
print('摄像头个数:{}'.format(connected_cam_num))
if connected_cam_num == cam_num:
continuous_value += 1
if continuous_value == continuous_stable_value:
break
else:
continuous_value = 0
veri_times += 1
if veri_times == max_veri_times:
print("检测超时,请检查摄像头连接!")
sys.exit()
'''配置各个摄像头的基本对象'''
for i in range(len(self.cam_serials)):
locals()['pipeline' + str(i)] = rs.pipeline(ctx)
locals()['config' + str(i)] = rs.config()
locals()['config' + str(i)].enable_device(self.cam_serials[i])
# 为啥我设置成1280×720就报错呢?明明Intel Realsense的usb接口已经显示为3.0了
# locals()['config' + str(i)].enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 30)
# locals()['config' + str(i)].enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30)
locals()['config' + str(i)].enable_stream(rs.stream.depth, self.cam_width, self.cam_height, rs.format.z16,
30)
locals()['config' + str(i)].enable_stream(rs.stream.color, self.cam_width, self.cam_height, rs.format.bgr8,
30)
locals()['pipeline' + str(i)].start(locals()['config' + str(i)])
# 创建对齐对象(深度对齐颜色)
locals()['align' + str(i)] = rs.align(rs.stream.color)
'''运行摄像头'''
try:
while True:
start_time = time.time()
for i in range(len(self.cam_serials)):
locals()['frames' + str(i)] = locals()['pipeline' + str(i)].wait_for_frames()
# 获取对齐帧集
locals()['aligned_frames' + str(i)] = locals()['align' + str(i)].process(
locals()['frames' + str(i)])
# 获取对齐后的深度帧和彩色帧
locals()['aligned_depth_frame' + str(i)] = locals()[
'aligned_frames' + str(i)].get_depth_frame()
locals()['color_frame' + str(i)] = locals()['aligned_frames' + str(i)].get_color_frame()
if not locals()['aligned_depth_frame' + str(i)] or not locals()['color_frame' + str(i)]:
continue
# 获取颜色帧内参
locals()['color_profile' + str(i)] = locals()['color_frame' + str(i)].get_profile()
locals()['cvsprofile' + str(i)] = rs.video_stream_profile(
locals()['color_profile' + str(i)])
locals()['color_intrin' + str(i)] = locals()['cvsprofile' + str(i)].get_intrinsics()
locals()['color_intrin_part' + str(i)] = [locals()['color_intrin' + str(i)].ppx,
locals()['color_intrin' + str(i)].ppy,
locals()['color_intrin' + str(i)].fx,
locals()['color_intrin' + str(i)].fy]
locals()['color_image' + str(i)] = np.asanyarray(
locals()['color_frame' + str(i)].get_data())
locals()['depth_image' + str(i)] = np.asanyarray(
locals()['aligned_depth_frame' + str(i)].get_data())
# 【阿尔法过滤】
locals()['depth_image_alpha_filter' + str(i)] = filter_alpha(locals()['depth_image' + str(i)],
self.filter_alpha)
# 【遍历深度图像素值,如存在小于危险值范围比例超过阈值,则告警】
locals()['num_all_pixels' + str(i)], locals()['num_dangerous' + str(i)], locals()[
'depth_image_segmentation' + str(i)] = traversing_pixels(
locals()['depth_image_alpha_filter' + str(i)], self.threshold_dangerous_distance)
print('num_all_pixels:{}'.format(locals()['num_all_pixels' + str(i)]))
print('num_dangerous:{}'.format(locals()['num_dangerous' + str(i)]))
locals()['dangerous_scale' + str(i)] = locals()['num_dangerous' + str(i)] / locals()[
'num_all_pixels' + str(i)]
print('危险比例:{}'.format(locals()['dangerous_scale' + str(i)]))
if locals()['dangerous_scale' + str(i)] > self.threshold_dangerous_scale:
print("距离警告!")
locals()['depth_colormap' + str(i)] = cv2.applyColorMap(
cv2.convertScaleAbs(locals()['depth_image_segmentation' + str(i)], alpha=0.0425),
cv2.COLORMAP_JET)
locals()['image' + str(i)] = np.hstack(
(locals()['color_image' + str(i)], locals()['depth_colormap' + str(i)]))
# 注意: 窗口名不要用中文字符, 小心乱码
cv2.imshow('win{}:{}'.format(i, self.cam_serials[i]), locals()['image' + str(i)])
# cv2.imshow('colorWin{}: {}'.format(i, self.cam_serials[i]), locals()['color_image' + str(i)])
# cv2.imshow('depthWin{}: {}'.format(i, self.cam_serials[i]), locals()['depth_colormap' + str(i)])
cv2.waitKey(1)
end_time = time.time()
# print('单帧运行时间:{}'.format(end_time - start_time))
# 遇到异常再次启动检测函数,如有需要可以将连续监测和摄像头重置全放进去
except:
print('\n出现异常,请重新检查摄像头连接!\n')
for i in range(len(self.cam_serials)):
cv2.destroyAllWindows()
locals()['pipeline' + str(i)].stop()
ObstacleDetection().obstacle_detection()
finally:
for i in range(len(self.cam_serials)):
locals()['pipeline' + str(i)].stop()
if __name__ == '__main__':
ObstacleDetection().obstacle_detection()
参考文章:为什么Intel Realsense D435深度摄像头在基于深度的水平方向障碍物检测(避障)方案中,摄像头不宜安装太高?















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











