









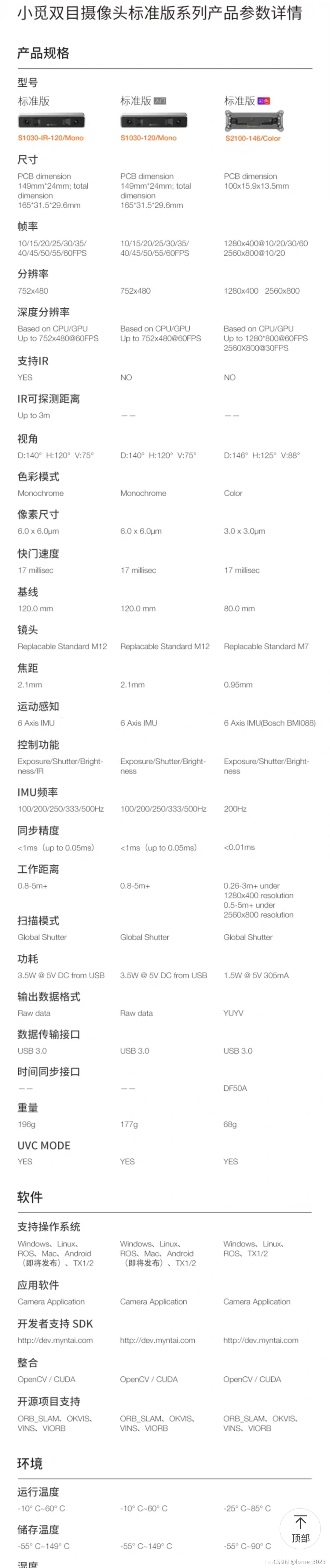
1. 小觅深度版(120°)
 特点:
特点:
1.采用“双目+IMU”的核心硬件方案组合:内置六轴IMU传感器,利用双目和IMU数据的互补性,能为视觉以及空间移动算法的研发提供数据校正,IMU与图像的同步精度高达0.05ms。
2.内置芯片:小觅双目摄像头深度版内置芯片,可以在设备端完成双目深度计算,无需依赖终端的GPU/CPU,本身便可直接输出双目深度图像。
3.IR主动光:内置两颗红外(IR)探测器,针对室内场景优化,可以有效增加白墙和无纹理物体的识别精度,同时可在黑暗环境中使用,为室内环境的识别和视觉SLAM算法的研究提供更精准的图像源
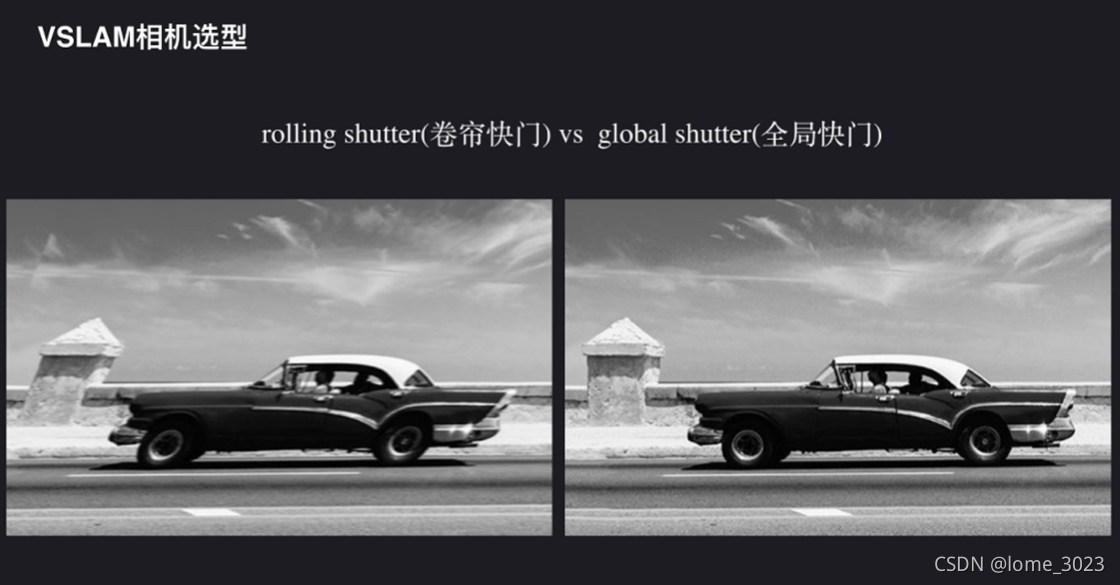
4.全局快门:实现两颗摄像头的所有像元同时曝光,在高速移动的拍摄场景中能有效降低图像畸变,提供更精准的图像源。
5.双目帧同步:采用的高精度芯片可以保证两颗协同运行的摄像头所拍摄的图像帧同步,从而为双目深度计算领域的算法研发提供精准的图像源
目前的双目方案
 小觅深度版是基于双目+惯导+结构光的方案
小觅深度版是基于双目+惯导+结构光的方案
视觉双目为主,融合结构光和惯导等方案,是最佳的低成本定位导航解决方案,也是双目相机的未来趋势
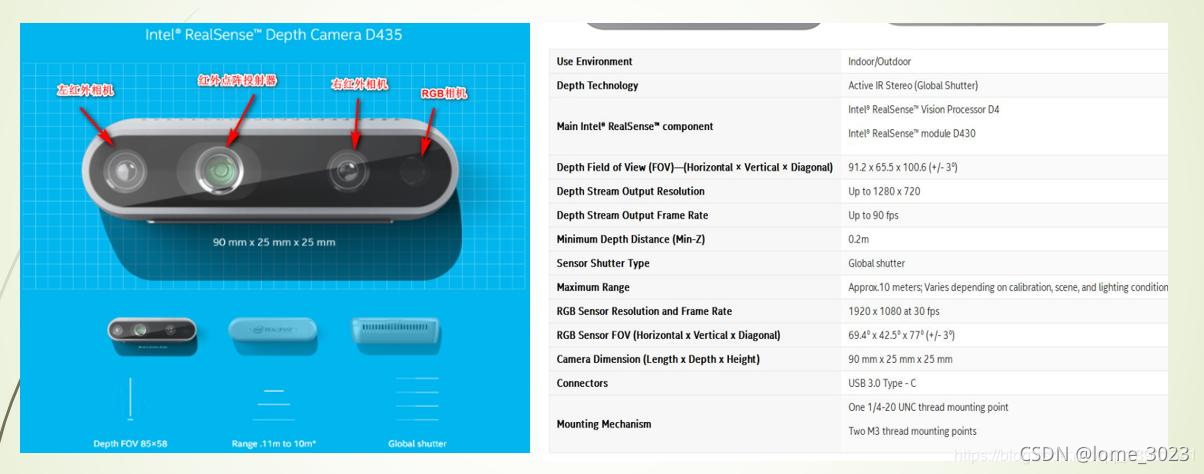
2.Realsense D435
 特点
特点
1.RealSense D435提供全局快门感应器和更大的镜头,获得更好的低光照性能。具有更强大的RealSense模块D430,是“机器人导航和物体识别等应用的首选解决方案”。捕捉最远距离可以达到10米,在户外阳光下也可以使用,支持输出1280x720分辨率的深度画面,更普通的视频传输方面可以达到90fps。
2.RealSense D435无imu
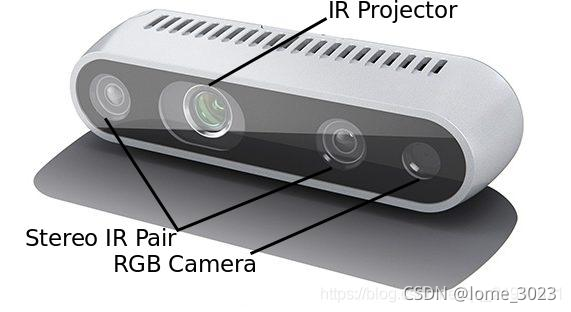
3.工作原理:通过红外点阵投射器透射光斑,在低纹理的环境中提供红外图案以提高双目匹配的精度。通过左右红外相机接收得到的红外图像,再用双目测距原理测距。进行匹配计算深度图视差图等数据。RGB相机获得彩色图像
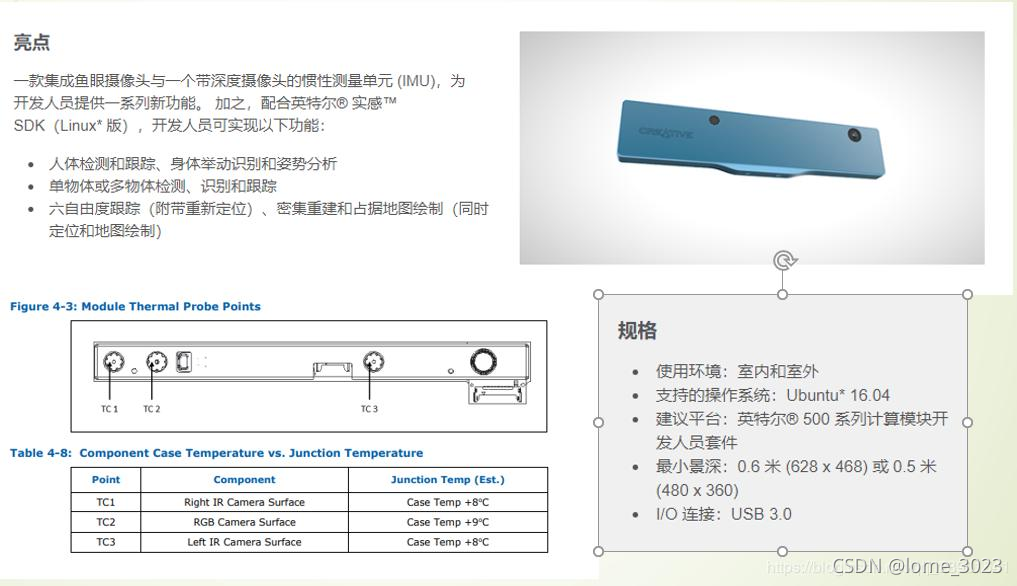
3.Realsense ZR300
 特点:
特点:
1.Realsense ZR300有IMU
2.依赖2个红外线摄像头捕捉的数据构建三维图像,RGB摄像头为辅助摄像头;主动红外线发射器受功率限制照射距离小于5米;RealSense模组可以应用于任何无人机,包括封闭和开放的飞控系统
3.工作原理:通过红外点阵投射器透射光斑,在低纹理的环境中提供红外图案以提高双目匹配的精度。通过左右红外相机接收得到的红外图像,再用双目测距原理测距。进行匹配计算深度图视差图等数据。RGB相机获得彩色图像。
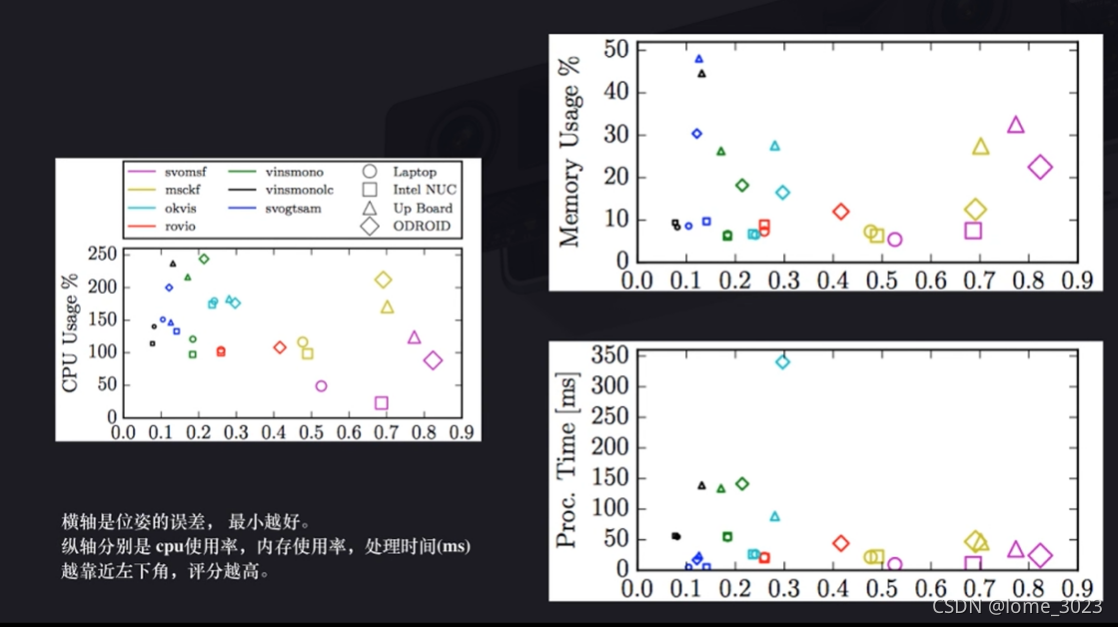
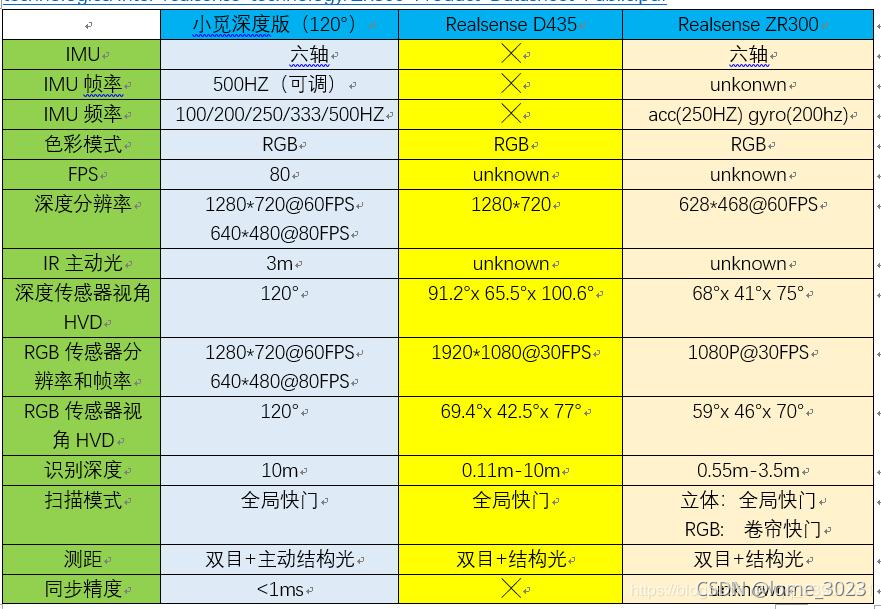
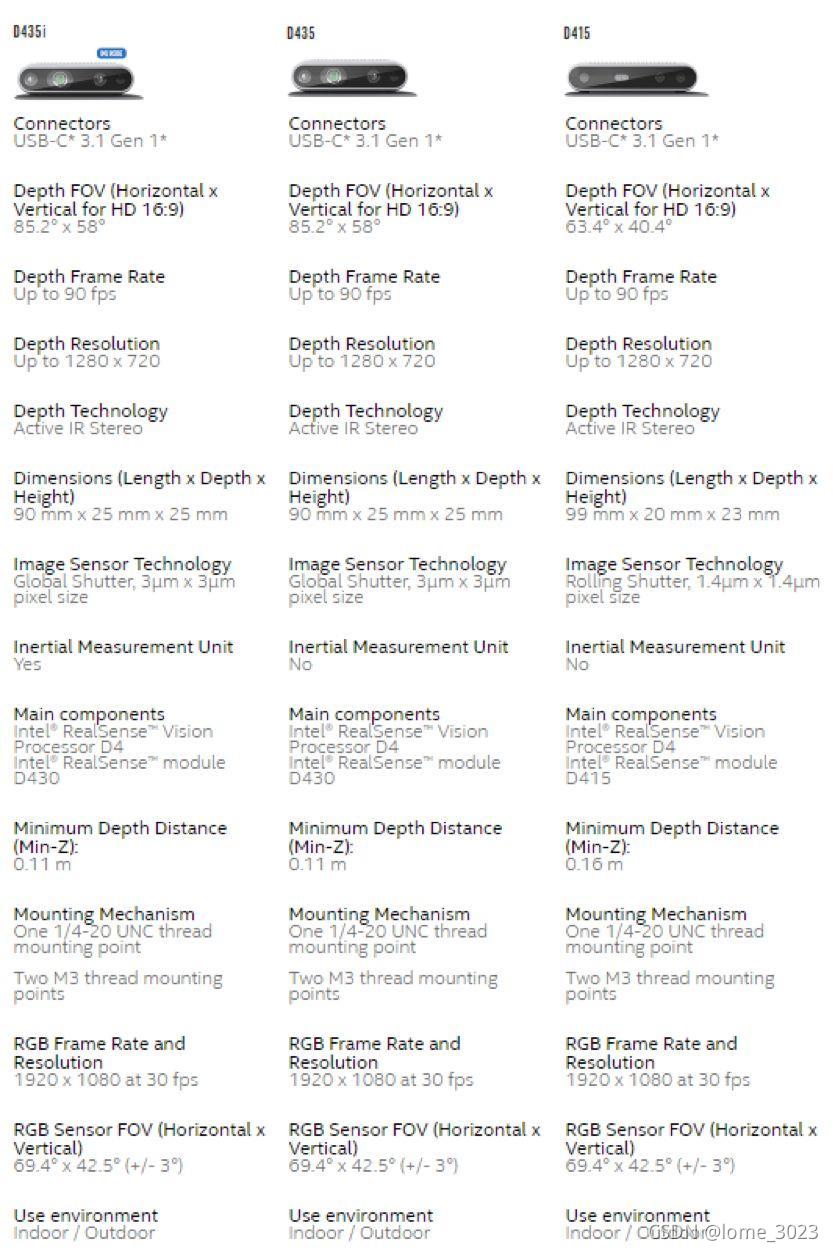
4.性能参数对比图
2.Realsense D435i
产品全称:
Intel RealSense Depth Camera D435i
 官方链接:https://www.intelrealsense.com/zh-hans/depth-camera-d435i/
官方链接:https://www.intelrealsense.com/zh-hans/depth-camera-d435i/
实物图:
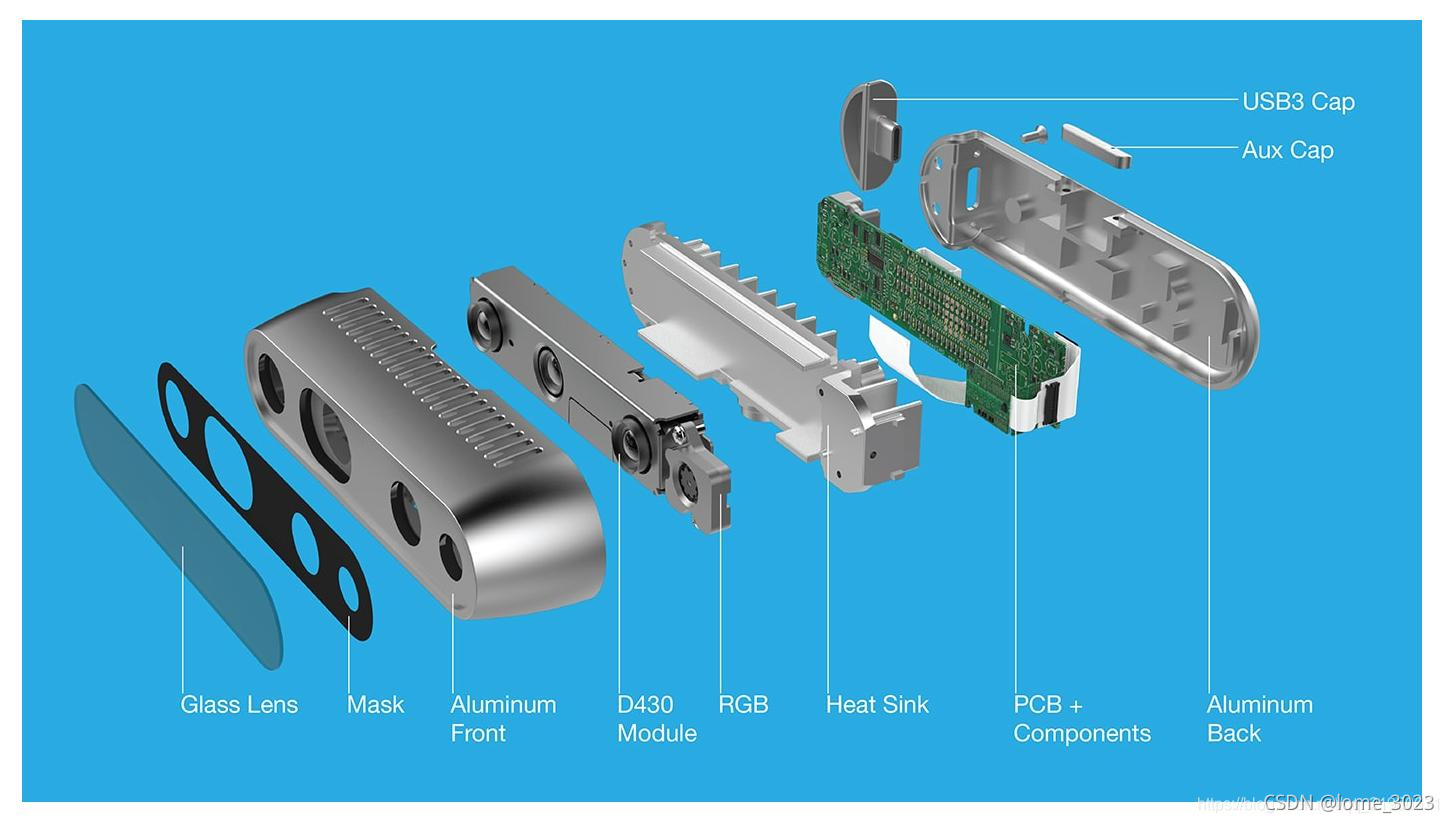
 硬件结构图:
硬件结构图:
 简介:
简介:
- D435i,该产品可以看作是D435的升级版,和D435的区别就在于多了一个IMU。D435i和前代规格几乎相当,其特点是不仅提供深度传感器模组,还配备了一个IMU单元(惯性测量单元,采用的博世BMI055)。凭借内置的IMU单元,结合视觉数据可实现6DoF追踪功能。其中,IMU将各种线性加速度计和陀螺仪数据结合,可检测X,Y,Z三轴的旋转和平移,以及俯仰、横摇等动作。
- D435i的2000万像素RGB摄像头和3D传感器可以30帧/秒的速度提供分辨率高达1280 × 720,或者以90帧/秒的速度提供848
× 480的较低分辨率。该摄像头具有全局快门,可以处理快速移动物体,室内室外皆可操作。深度距离在0.1 m~10 m之间,视场角度为85
× 58度。
- RGB-D(红绿蓝-深度)相机是3D相机,其在像素级输出具有颜色和深度信息的图像。
- 一对立体红外传感器(IR Stereo Camera)、一个红外激光发射器(IR Projector)和一个彩色相机(RGB传感器)。
- USB供电;
- 具有全局快门感应器;
- 更大的85度左右的镜头视场(FOV);
- 摄像机的捕捉最远距离可以达10米;
- 户外阳光下也可以使用
- 输出1280x720分辨率的深度画面
- 视频传输方面可以达到90fps
- 6DOF追踪功能(six degree of freedom);
- IMU将各种线性加速度计和陀螺仪数据结合,可检测X、Y、Z三轴的旋转和平移,以及俯仰、偏航、横滚等动作。
小觅双目摄像头标准版
区别在于,标准版输出的是灰度图像,更适用于双目视觉 slam 开源项目的研究,适合算力充足的终端应用;深度版提供深度计算能力,无需依赖 CPU/GPU 的算力,采用 RGB 镜头,更适用于立体避障和彩色物体识别。


















 3664
3664

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









