






已搬运至我的GitHub chengyuZou (Litar)
一、简介
OpenSim 是斯坦福大学开发的用于开发、分析和可视化人体肌肉骨骼系统的免费开源软件。它能应用在很多领域,如行走动力学分析、运动表现研究、手术过程仿真、医疗器械设计等。在OpenSim中,一个肌肉骨骼模型是由各个关节把多块骨骼连接起来,其中肌肉附着在骨骼上,通过肌肉产生的力来带动关节运动。目前OpenSim 被用于全球上百个生物力学实验室的运动研究,并拥有一个活跃的开发者社区来不断完善其功能。
但是,OpenSim生成的模型中默认不带有皮肤,因此需要我们去手动添加
二、示例(Body)部分
编译Opensim骨骼模型的文件为.osim格式,其写法类似于前端的HTML语言的xml语言
这里拿定义右大臂骨骼模型的代码为例。
<Body name="humerus_r">
<!--The geometry used to display the axes of this Frame.-->
<FrameGeometry name="frame_geometry">
<!--Path to a Component that satisfies the Socket 'frame' of type Frame.-->
<socket_frame>..</socket_frame>
<!--Scale factors in X, Y, Z directions respectively.-->
<scale_factors>0.20000000000000001 0.20000000000000001 0.20000000000000001</scale_factors>
</FrameGeometry>
<!--List of geometry attached to this Frame. Note, the geometry are treated as fixed to the frame and they share the transform of the frame when visualized-->
<attached_geometry>
<Mesh name="humerus_r_geom_1">
<!--Path to a Component that satisfies the Socket 'frame' of type Frame.-->
<socket_frame>..</socket_frame>
<!--Scale factors in X, Y, Z directions respectively.-->
<scale_factors>1.0124521312654093 1.0124521312654093 1.0124521312654093</scale_factors>
<!--Default appearance attributes for this Geometry-->
<Appearance>
<!--Flag indicating whether the associated Geometry is visible or hidden.-->
<visible>true</visible>
<!--The opacity used to display the geometry between 0:transparent, 1:opaque.-->
<opacity>1</opacity>
<!--The color, (red, green, blue), [0, 1], used to display the geometry. -->
<color>1 1 1</color>
<!--Visuals applied to surfaces associated with this Appearance.-->
<SurfaceProperties>
<!--The representation (1:Points, 2:Wire, 3:Shaded) used to display the object.-->
<representation>3</representation>
</SurfaceProperties>
</Appearance>
<!--Name of geometry file.-->
<mesh_file>humerus_rv.vtp</mesh_file>
</Mesh>
</attached_geometry>
<!--Set of wrap objects fixed to this body that GeometryPaths can wrap over.This property used to be a member of Body but was moved up with the introduction of Frames.-->
<WrapObjectSet name="wrapobjectset">
<objects />
<groups />
</WrapObjectSet>
<!--The mass of the body (kg)-->
<mass>1.6941896825604743</mass>
<!--The location (Vec3) of the mass center in the body frame.-->
<mass_center>0 -0.16655040049742237 0</mass_center>
<!--The elements of the inertia tensor (Vec6) as [Ixx Iyy Izz Ixy Ixz Iyz] measured about the mass_center and not the body origin.-->
<inertia>0.010207114500963559 0.0035211383608296349 0.011457157068761123 0 0 0</inertia>
</Body>2.1大臂模型由<Body>标签定义。
2.2<FrameGeometry>为坐标轴可视化。
<scale_factors>为坐标轴缩放因子
<socket_frame>继承父级坐标系变换(这个可以不管)
2.3 <attached_geometry>的几何可视化。
<Mesh>用来加载模型的三维网格
<socket_frame>表示该组件继承父框架坐标系
<scale_factors>为模型在XYZ轴的缩放系数,1 1 1为初始大小
2.3.1<Appearance>定义外观属性
<visible>定义模型是否可见
<opacity>为模型透明度,1为完全不透明
<color>定义颜色,RGB白色显示(取值范围0-1)
<representation>为渲染模式,可不管
2.3.2<mesh_file>定义模型文件路径
2.4<WrapObjectSet>定义动力学交互组件
这个不怎么重要,一般都是附加一个球,椭圆啥的,跳过
2.5剩余部分
<mass>定义质量
<mass_center>定义质心在局部坐标系中的坐标
<inertia>定义惯性张量(Ixx,Iyy,Izz,Ixy,Ixz,Iyz)
三、演示(Body)部分
介绍完了直接上正文
<!-- 右大臂皮肤模型 -->
<Body name="skin_humerus_r">
<mass>1.6941896825604743</mass>
<!--The location (Vec3) of the mass center in the body frame.-->
<mass_center>0 0 0</mass_center>
<!--The elements of the inertia tensor (Vec6) as [Ixx Iyy Izz Ixy Ixz Iyz] measured about the mass_center and not the body origin.-->
<inertia>0.010207114500963559 0.0035211383608296349 0.01 0 0 0</inertia>
<Position>0 0 0</Position>
<FrameGeometry name="frame_geometry">
<!--Path to a Component that satisfies the Socket 'frame' of type Frame.-->
<socket_frame>..</socket_frame>
<!--Scale factors in X, Y, Z directions respectively.-->
<scale_factors>0.30000000000000001 0.30000000000000001 0.30000000000000001</scale_factors>
</FrameGeometry>
<attached_geometry>
<Mesh name="skin_humerus_right">
<!--Path to a Component that satisfies the Socket 'frame' of type Frame.-->
<socket_frame>..</socket_frame>
<!--Scale factors in X, Y, Z directions respectively.-->
<scale_factors>1.0124521312654093 1.0124521312654093 1.0124521312654093</scale_factors>
<!--Default appearance attributes for this Geometry-->
<Appearance>
<!--Flag indicating whether the associated Geometry is visible or hidden.-->
<visible>true</visible>
<!--The opacity used to display the geometry between 0:transparent, 1:opaque.-->
<opacity>1</opacity>
<!--The color, (red, green, blue), [0, 1], used to display the geometry. -->
<color>1 1 1</color>
<!--Visuals applied to surfaces associated with this Appearance.-->
<SurfaceProperties>
<!--The representation (1:Points, 2:Wire, 3:Shaded) used to display the object.-->
<representation>3</representation>
</SurfaceProperties>
</Appearance>
<!--Name of geometry file.-->
<mesh_file>D:\GaitCode\pose2sim-main\Pose2Sim\Demo_SinglePerson\parts\back-arm.stl</mesh_file>
</Mesh>
</attached_geometry>
</Body>其中的<mesh_file>为一个大臂皮肤模型的路径(.STL)格式,在Blender中长这样
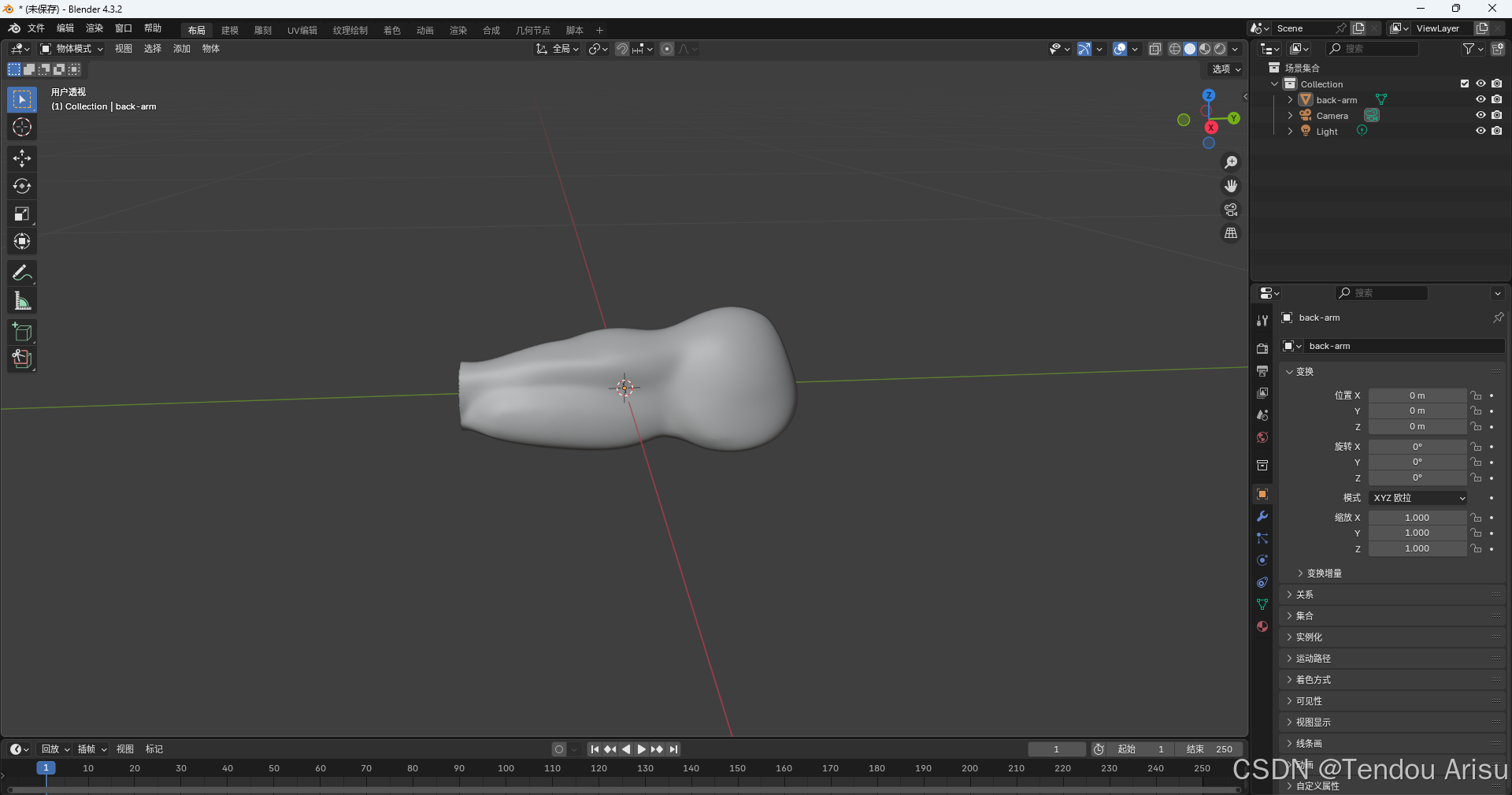
一定要让中心点为该模型的质心点,不然到最后无法让皮肤模型附加在上面
四.演示(Joint)部分
定义完Body部分,接着再来定义Joint部分,不然在Opensim导入文件时会报错
<!-- 绑定右大臂皮肤的 Joint -->
<WeldJoint name="humerus_r_skin_attachment">
<socket_parent_frame>humerus_r_offset</socket_parent_frame>
<socket_child_frame>humerus_r_skin_frame</socket_child_frame>
<frames>
<PhysicalOffsetFrame name="humerus_r_offset">
<FrameGeometry name="frame_geometry">
<socket_frame>...</socket_frame>
<scale_factors>0.2 0.2 0.2</scale_factors>
</FrameGeometry>
<socket_parent>/bodyset/humerus_r</socket_parent>
<translation>0 -0.15655040049742237 0</translation>
<orientation>0 0 0</orientation>
</PhysicalOffsetFrame>
<PhysicalOffsetFrame name="humerus_r_skin_frame">
<FrameGeometry name="frame_geometry">
<socket_frame>...</socket_frame>
<scale_factors>1 1 1</scale_factors>
</FrameGeometry>
<socket_parent>/bodyset/skin_humerus_r</socket_parent>
<translation>0 0 0</translation>
<orientation>0 0 0</orientation>
</PhysicalOffsetFrame>
</frames>
</WeldJoint>此处了一个WeldJoint(焊接关节),用于将右大臂皮肤(skin_humerus_r)刚性地绑定到骨骼(humerus_r)上。焊接关节会完全消除两个刚体之间的相对运动,刚好符合我们附加皮肤的预期。
4.1
<socket_parent_frame>定义父骨骼的偏移坐标系
<socket_child_frame>定义子皮肤部件的坐标系
此时包含两个物理偏移坐标系,需在下方定义
4.2<frames>
定义了骨骼侧坐标系与皮肤侧坐标系
4.2.1<PhysicalOffsetFrame name="humerus_r_offset">
<socket_parent>定义父部件(右大臂骨骼)
<translation>定义位置,分别为XYZ ,这里表示在骨骼局部坐标系中沿Y轴负方向偏移约0.157米
<orientation>定义旋转,此时为不旋转
4.2.2<PhysicalOffsetFrame name="humerus_r_skin_frame">
几乎与前者一致,<socket_parent>定义了右大臂皮肤
完全对齐皮肤部件的原始坐标系
最后结果为,当骨骼humerus_r运动时,焊接关节强制使humerus_r_offset与humerus_r_skin_frame保持重合,最终驱动皮肤部件skin_humerus_r跟随骨骼运动。
五、演示(可视化)
照片与视频如下
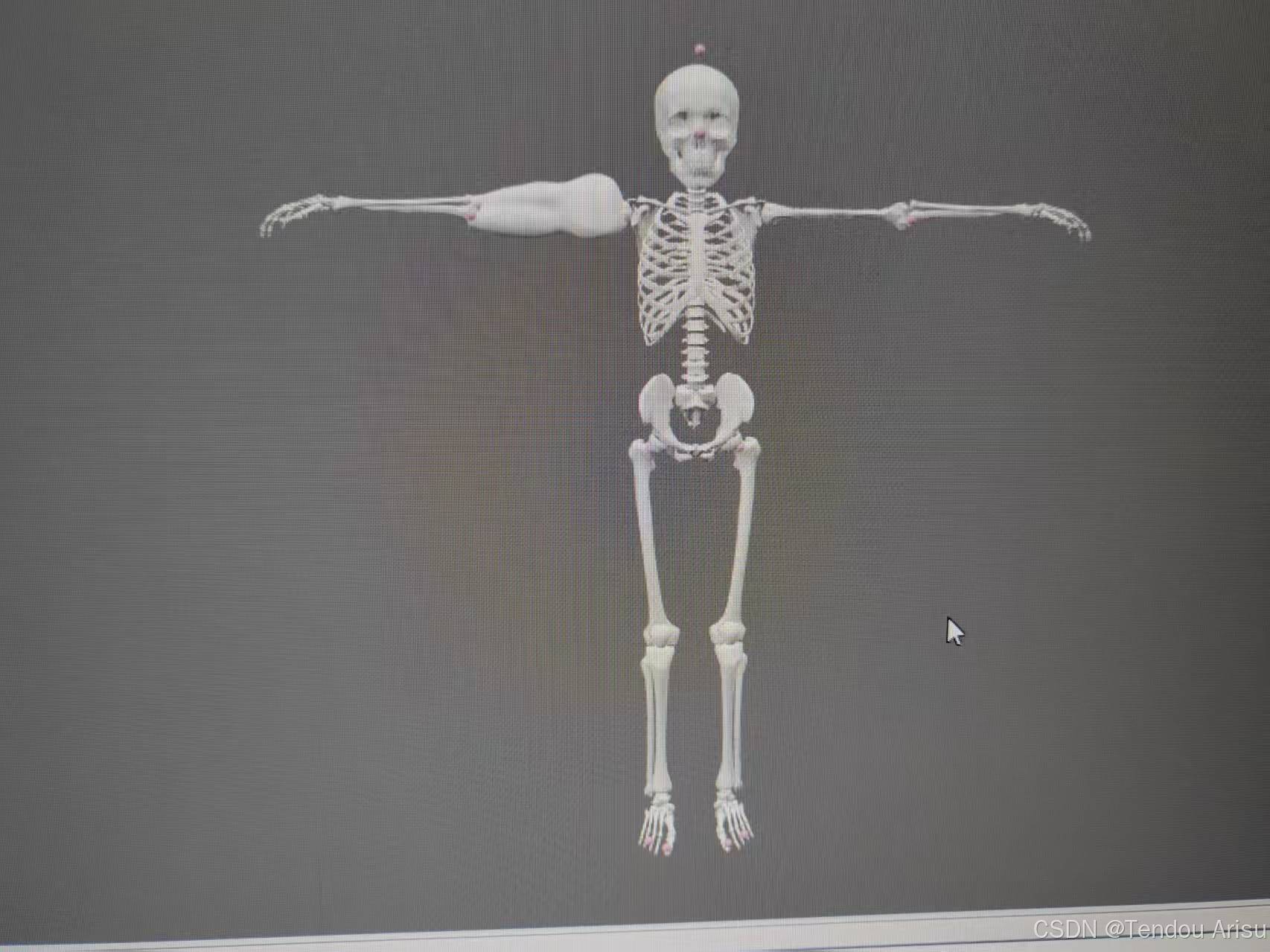
Opensim骨骼导入皮肤模型

















 2108
2108

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









