







uORB是PX4/Pixhawk系统中非常重要且关键的模块之一,是用于无人机模块间通信的协议机制。本篇将详细介绍uORB并详细拆解uORB消息读写与自定义实验流程(三)。
基础实验篇 | uORB消息读写与自定义实验(三)
01
基于RflySim平台自定义uORB消息实验
PX4的若要新增uORB消息,需要在PX4PSP\Firmware\msg文件夹中新建.msg后缀的消息文件,并需要在CMakeLists.txt中添加消息名字。RflySim平台提供了一个自动化的脚本PX4uORBMsgGen.m来实现上述注册过程。
在PX4uORBMsgGen.m文件同目录下新建自定义的.msg格式消息文件(支持同时自定义多个.msg消息文件),再运行的PX4uORBMsgGen.m文件,该程序会自动搜索本目录下的所有.msg格式的uORB消息,并自动注册到Firmware/msg路径中。在创建完成自定义的msg文件之后,利用uORB消息数据发布接口模块,通过填写具体的msg文件名称,实现uORB消息的写入,如下图所示:
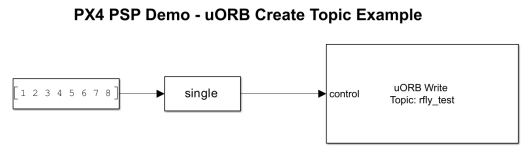
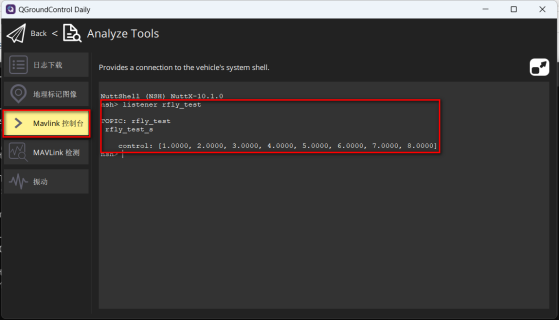
Demo中对自定义的消息,写入了8个数字,在自动代码生成固件烧录之后,通过QGC的Anslyze Tools->MAVLINK 控制台中,输入listener rfly_test即可看到本例程的运行效果如下:
02
实验对比
uORB消息读写和自定义实验分别在PX4软件和RflySim平台中进行开发演示,相较于在PX4软件中开发本实验,RflySim大大的减少了实验开发的步骤和代码量,降低了飞控底层开发的门槛。
参考资料
[1]. https://doc.rflysim.com/















 878
878











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









