






基于MPC模型预测控制的路径跟踪控制,通过设置路径函数或者以点的形式设置路径,五次多项式路径,双移线路径,sin曲线路径都有,可在S函数内随意切换,同时加入了前轮侧偏角约束,可以完美运行
包括:模型,参考文档,仿真调试视频,只要安装好软件16carsim和16bmatlab,就可以按照视频调试
YID:3250618406231996
琅琊双子座灯草
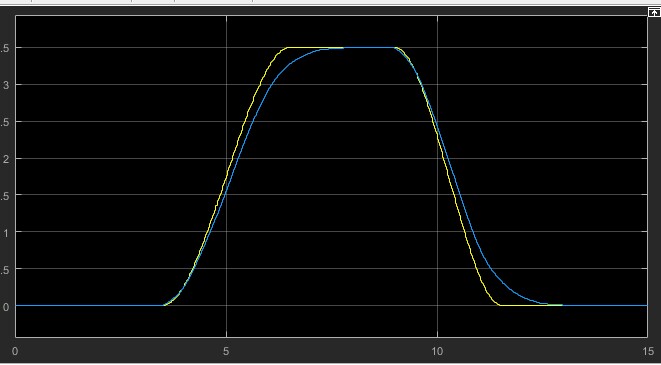
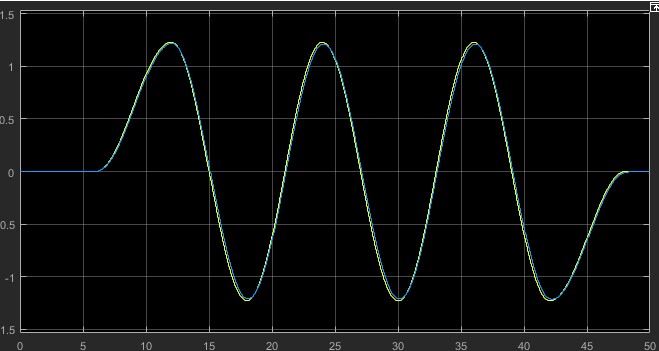
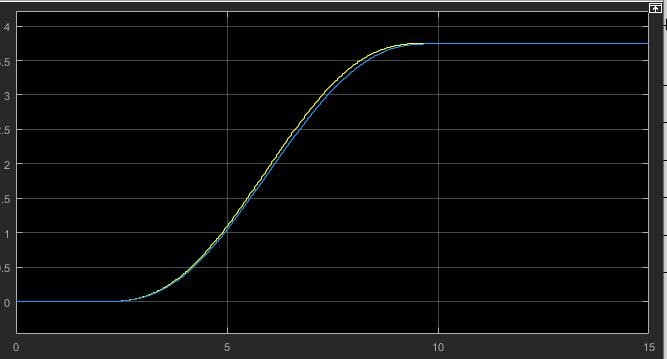
基于MPC模型预测控制的路径跟踪控制是一种高级控制算法,能够在复杂的道路环境下实现车辆的精准导航。该控制方法通过设置路径函数或者以点的形式设置路径,支持多种路径类型,如五次多项式路径、双移线路径和sin曲线路径,并且可以在S函数内随意切换。
在路径跟踪过程中,MPC模型预测控制方法不仅考虑了车辆当前状态,还考虑了车辆未来的运动情况。通过建立动力学模型,预测车辆未来的轨迹,并将其作为控制器的参考,使得车辆能够按照预期的路径进行行驶。同时,该方法还引入了前轮侧偏角约束,以避免车辆转弯时发生侧翻等危险情况。
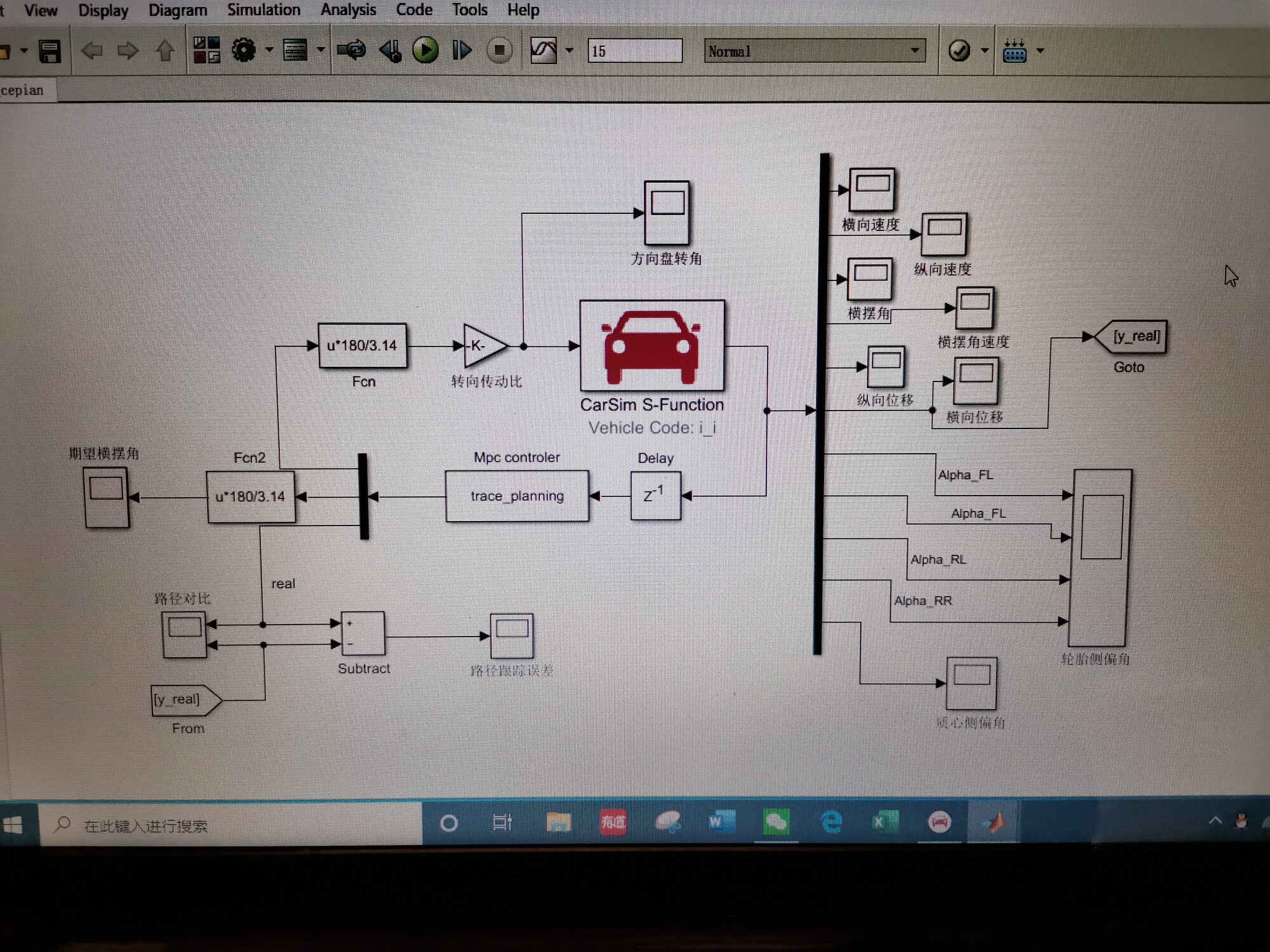
为了验证路径跟踪控制算法的有效性,我们在16carsim和16bmatlab软件上进行了仿真调试。在仿真过程中,我们通过安装好相应的软件,并参考提供的文档进行配置,即可按照仿真调试视频中的步骤进行操作。通过仿真调试,我们可以直观地观察到路径跟踪控制算法的效果,验证其在不同路径设置下的适用性。
在实际应用中,基于MPC模型预测控制的路径跟踪控制方法具有广泛的应用前景。它可以应用于自动驾驶系统中,使得车辆能够自动遵循预先设置的路径行驶。此外,该控制方法还可以应用于物流车辆的路径规划中,提高物流效率和减少成本。总之,基于MPC模型预测控制的路径跟踪控制方法具有重要的理论意义和实际应用价值。
总结一下,基于MPC模型预测控制的路径跟踪控制方法通过设置路径函数或者以点的形式设置路径,支持多种路径类型,并引入前轮侧偏角约束,能够实现车辆的精准导航。该方法在16carsim和16bmatlab软件上进行了仿真调试,通过安装好软件并参考文档配置,即可按照仿真调试视频进行操作。基于MPC模型预测控制的路径跟踪控制方法具有广泛的应用前景,可以应用于自动驾驶系统和物流车辆的路径规划中,具有重要的理论意义和实际应用价值。
以上相关代码,程序地址:http://wekup.cn/618406231996.html















 495
495











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









