







要完成一套完整的机器人路径规划,并完成其物理实验并非一件简单的事情。
在运用好的路径规划算法,规划好一条从起点到目标点最优的路径后,如何让机器人来寻着这条最优的路径走,是一个需要解决的问题。
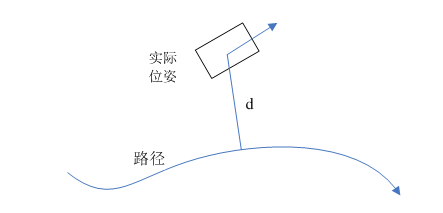
路径跟踪(Path tracking),是在平面坐标系下设定一条理想的几何路径,然后要求机器人从某一处出发,按照某种控制规律到达该路径上,并实现其跟踪运动。
运动学方程
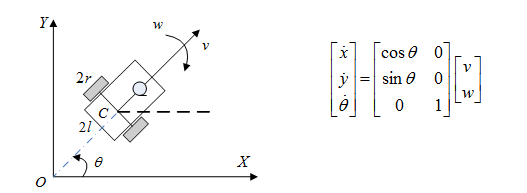
运动学模型直接刻画出了系统位置与速度之间的数学关系,以两轮驱动移动机器人为例,如图所示,运用物理学质点运动分析法可得到
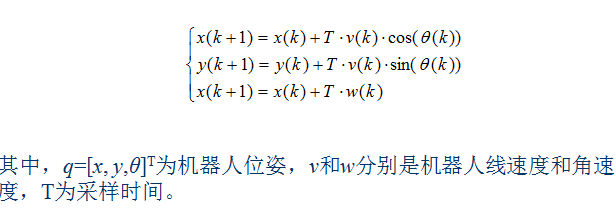
离散化可表示为:
控制规律
假设参考路径可由一系列的参考点组成,即qr=[xr, yr,θr]T,定义位姿误差,即
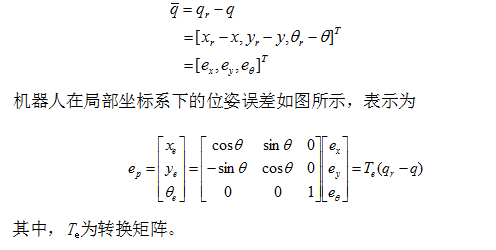
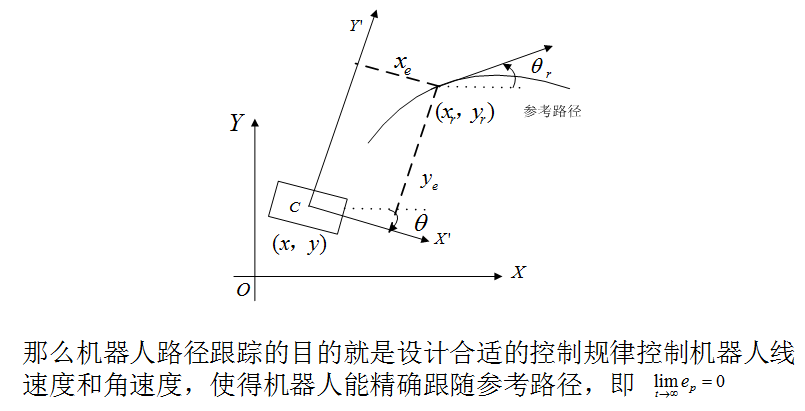
下面就可以设计合适的控制器达到机器人精确跟随参考路径。
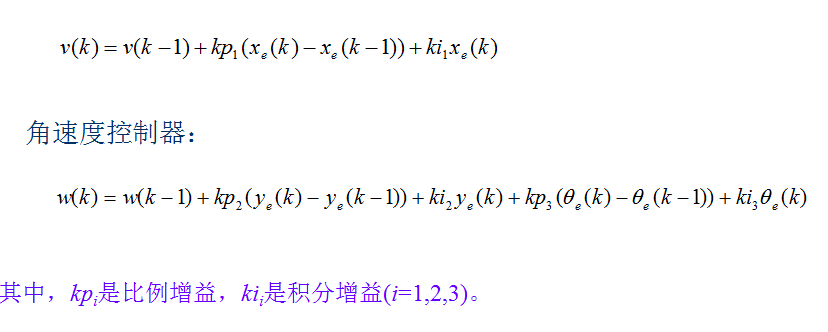
PI控制器的设计
线速度控制器
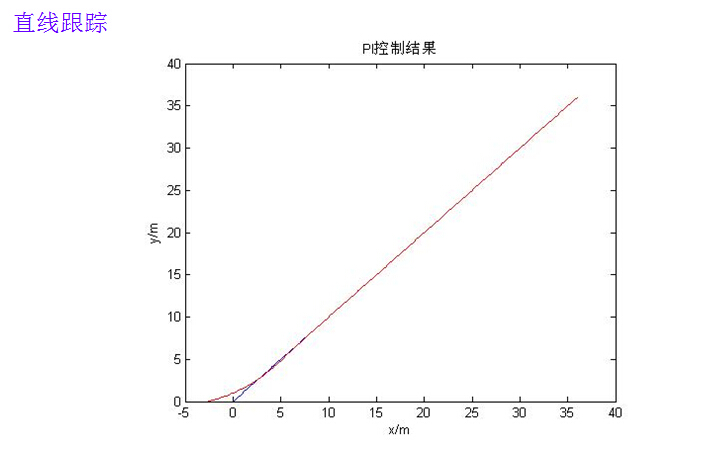
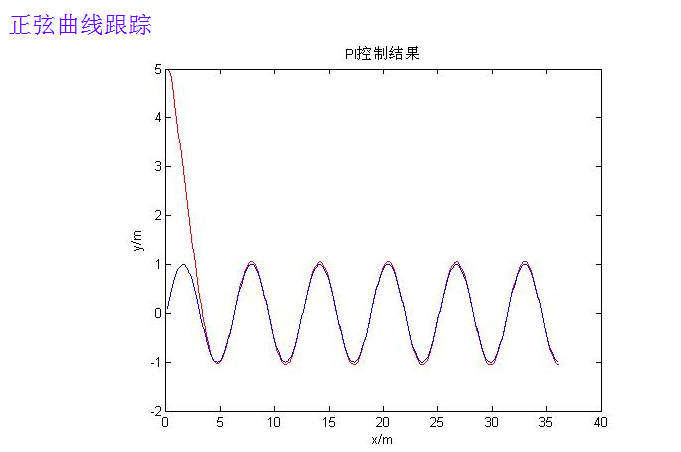
仿真结果















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









