






今天分享的人形机器人系列深度研究报告:《2024年度人形机器人行业投资策略:奇点时刻,未来已来》。
(报告出品方:华创证券)
报告共计:35页

一、过去: 人形机器人近百年发展复盘
(一)人形机器人三个阶段: 人工智能爆发,人形机器人应用推广在即
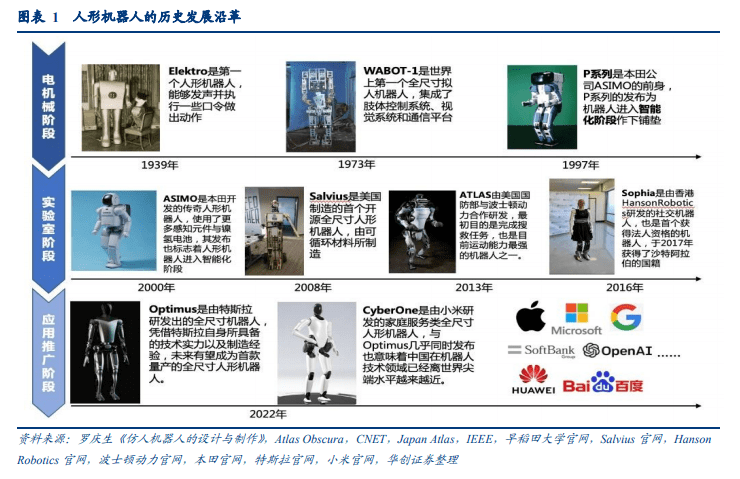
人形机器人从 1939 年第一台电机械控制的 Elektro 开始至今已历经近百年时间,我们从技术变化的角度将其划分成三个阶段: 电机械阶段,实验室智能阶段和应用推广阶段。
1)电机械阶段:此时的人形机器人仅仅是通过模仿人的行为去进行如移动、抬手发声等较简单的动作。这个时期的代表为日本早稻田大学研发出的 WAP、WL 和WABOT 系列机器人,该阶段主要侧重通过机械性地模拟人的行走使得机器人能够移动。
2)实验室智能阶段: 传感系统、控制系统、软件算法等多个技术实现发展,2000 年本田开发的 ASIMO 将人形机器人带入实验室智能阶段,此时的机器人逐渐能够通过传感器获取外部信息,通过简单的分析判断做出相应的决策,可以实现如“8”字形行走、拧开瓶盖、单双脚跳跃等简单动作。在智能化阶段美国与日本齐头并进,日本侧重于外形仿真,而美国则更侧重于用计算机模拟人脑的功能。
3)应用推广阶段:特斯拉的 Optimus 的发布引领全球人形机器人向 C 端应用发展,而 2023 年 ChatGPT 的迅速选代加强了人们对于人形机器人商业化的信心,全球科技巨头纷纷下场布局研发,我们认为 2023 年可以成为人形机器人正式进行应用推广的元年。
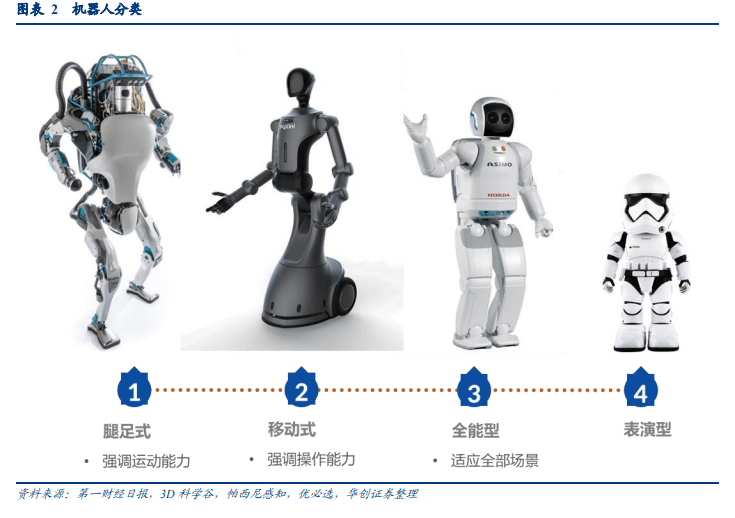
(二)人形机器人的分类: 腿足式,移动式,全能型,表演型
根据机器人设计类型可分为 4 类:
1) 腿足式: 以波士顿动力的 Atalas 为代表,强调机器人的腿部运动能力,手部基本只用作平衡。
2) 移动式:以帕西尼感知的机器人多拉(Tora)为代表,主要采用轮式驱动+协作机器人手臂+灵巧手方案,强调触觉传感器+灵巧手的操作功能,同时兼备移动能力.
3)全能型: 以本田的 ASIMO 为代表,具备双足+双臂+双手+各类感知+人工智能的功能,以全面的软硬件基础,适应开放环境中的多任务
4)表演型:仅能完成既定环境下的基础动作。
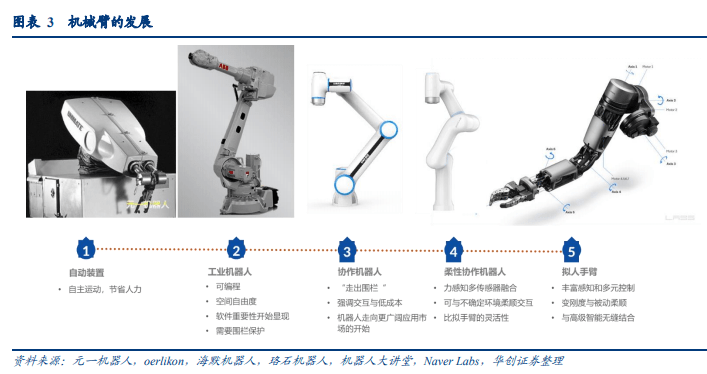
机械臂已经成功商用,而机械腿尚未成熟。所有的工作都要由手臂完成,这也是工 业/协作机器人蓬勃发展的根本原因,而机械腿的移动速度远远弱于轮子,且运动控 制难度极大,成本极高,至今尚未实现推广,所以机械手的重要性远高于机械腿。
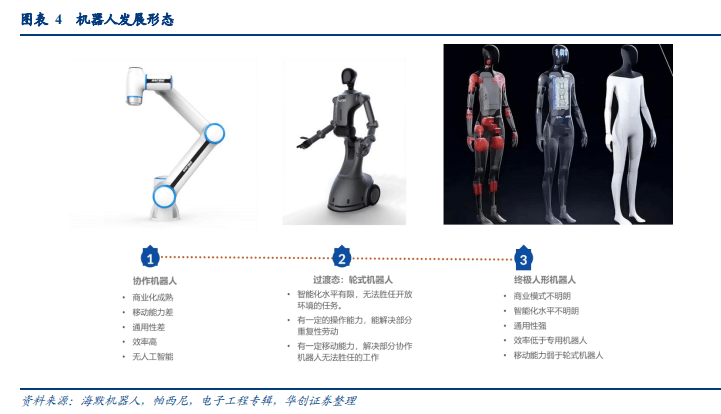
通用性机器人的终极形态是人形,中间可能有过渡形态。除了机械臂是直接产生效 应的零件单元不可或缺之外,其他零件都有替代方案。在固定工作岗位上的专用机 器人效率肯定高于通用性机器人,而目前的机器人智能化水平不足以支撑在开放复 杂环境中的任务,所以我们认为,当前更有可能适用的场景是封闭工作环境,同时 需要短距离移动的重复性劳动工作,而轮式+协作机器人+灵巧手的方案是更有可能的短期过渡方案。
(三)本田 ASIMO 人形机器人:无冕之王倒在黎明前
ASIMO 是本田最先进的人形机器人。ASIMO 是本田技研工业株式会社研制的类人 型机器人,名字来自其全称 Advanced Step Innovative Mobility (高级步行创新机器 人)的英文缩写,历经三十多年的研发历史,技术底蕴深厚。
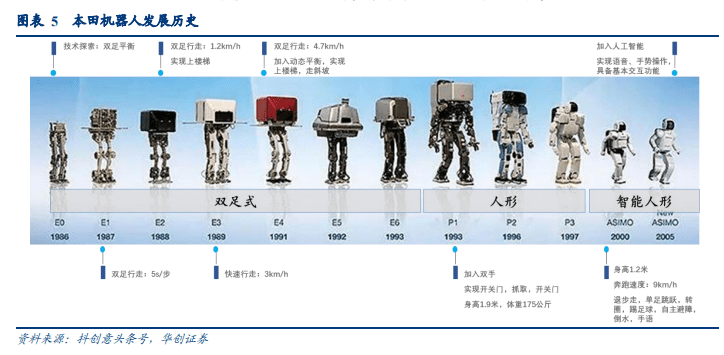
ASIMO 硬件基本满足人形机器人运动控制。ASIMO 身高 1.2m,采用纯电力驱动,自由度 57个(头部3 个,两只手臂各 7个,两只手各 13 个,躯干2个,两条腿各6个),具备奔跑 (9km/h),单腿跳跃,转圈,踢足球,自主避障,倒水,手语等功能。
ASIMO 后续逐渐升级人工智能,能完成语音交互,语音控制,手势控制等,来从事相应动作,并具备了基本的记忆与辨识能力。
不智能,不便宜,没场景导致 ASIMO 项目终止。虽然 ASIMO 在全球范图内为本田带来了超高的关注度,但是本田依然在 2018 年6月停止了 ASIMO 的研发。
1) 不智能: ASIMO 未等到 AI 时代的到来。ASIMO 发布于2000 年,智能化水平低下1)仅能完成基础任务,无法适应开放环境,在持续投入无法实现商业化之后,最终在2018年停止研发。2023年ChatGPT 引爆人工智能,同年7月谷歌发布机器人 AI大模型 Robotic Transformer 2 ( RT-2),人形机器人的智能化才看到了希望。
2) 不便宜: ASIMO 硬件售价 250 万美元,2002 年的租赁价格也高达每年 2000 万日元(15.24 万美金),高昂的售价让普通民众可望不可即,只能寄希望于 B 端市场,有限的工作能力无法满足 B 端对成本的要求。
3) 没场景: 由于功能有限,智能化水平较低,SIMO 仅适用于展览,研发等场景,而高昂的售价注定无法收回成本,官方也一直未公布销量。
(四)波士顿动力 Atalas,8年3 次易主,技术先进却无法商业化落地
波士顿动力发展坎坷,始终无法找到商业化道路。
1) 实验室阶段: 波士顿动力创始人 Raibert( 现波士顿动力创始人及首席执行官 )于 1980年在 CMU (卡内基梅隆大学) 创建 lcglab,开始研究单腿机器人,后来逐渐发展成双足,四足机器人。
2)1992 年波士顿动力成立:为美国陆军提供机器人研究制造的企业,服务过包括美国国防高级研究计划局(DAROA)在内的很多军方机构,还获得过国防部几千美元万的投资。
3) 2013 年谷歌收购: 谷歌的 Andy Rubin 主导收购了 8 家机器人公司,包括制造人形机30器人的波士顿动力以及 Schaft,波士顿动力开始向民用领域转型,推出了 spot 四足机械狗。
4)2017 年软银收购: 软银收购了谷歌的旗下的波士顿动力以及 Schaft。但是由于公司迟迟无法实现盈利,而软银因自身的财务问题,最终抛售波士顿动力。
5)2021 年现代汽车收购:8.8 亿美金收购波士顿动力 80%股权,软银保留 20%股权。
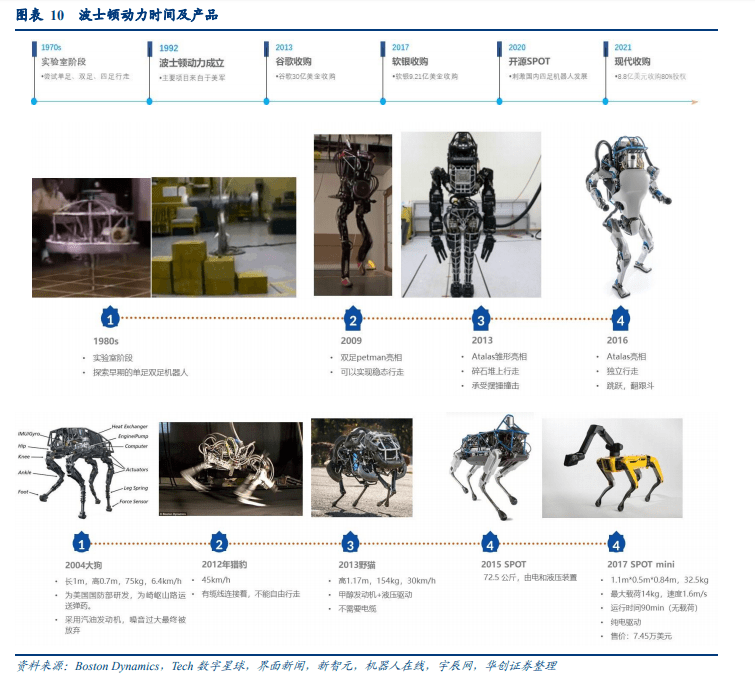
双足机器人并未实现商业化,四足机器人始终未能找到合适的工作场景。
1) 大狗是为美军设计的在崎岖山路中的运输四足机器人,但是采用发动机作为动力源, 噪音过大导致战场生存能力差,最终被束之高阁。
2) 猎豹虽然最高时速达到了 45km/h,但是必须采用线缆作为动力源,无法适应户外。
3) 野猫降低了速度,具备独立动力源,但是续航能力仅 1 小时,无法适应战场环境。
4) SPOT 是谷歌收购后向民用转型的产品,开始采用电力驱动,更加偏向工业机器人, 替代人工进入危险领域工作,但是价格高达 7.45 万美金,始终未能打开市场。
二、未来: 人形机器人奇点时刻,市场或超千亿
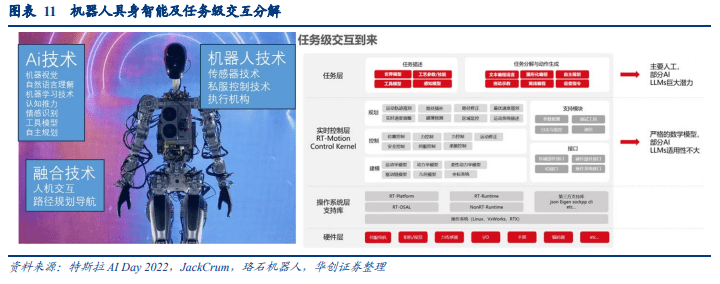
(一)人形机器人是 AI 具身智能的最佳载体,新势力逐渐加速入场
人形机器人也是AI具身智能的最佳载体。具身智能 ( Embodied AI) 指的是具有身体的人工智能,是 AI 进入物理世界交互的载体。目前的多模态 AI模型可以处理包括文本、图像、音频、视频等,但无法进入真实物理世界,而人形机器是 AI进入物理世界的最佳载体。
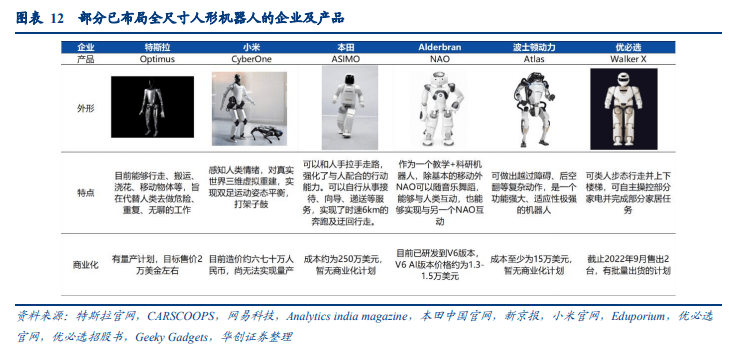
新势力加速入场布局人形机器人。在特斯拉产品发布之前也有多种全尺寸人形机器 人,但主要用于科教、研究、娱乐等领域,可以实现的功能相对较少,且售价高昂。 目前包括特斯拉、小米集团、小鹏汽车、开普勒、追觅、达闼、傅利叶等机器人新势力企业入局,也会对机器人大模型、制造、降本等产生积极推进作用。
(二)人形机器人市场空间或超千亿
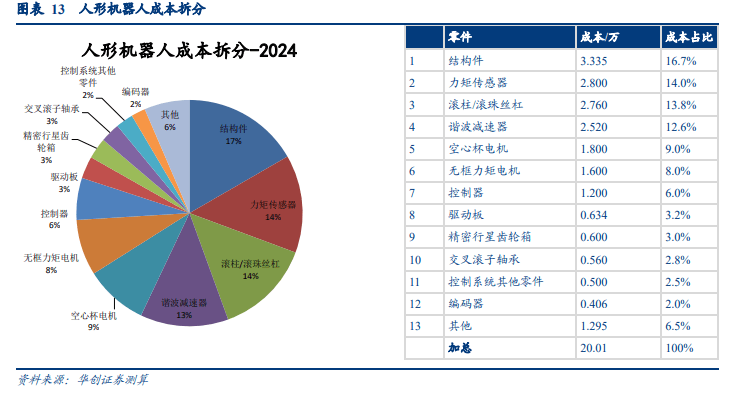
我们测算,特斯拉 Optimus 机器人 BOM成本预计 20 万元。其中结构件成本占比最高,其次为力矩传感器、丝杠、减速器、空心杯电机、无框力矩电机等。
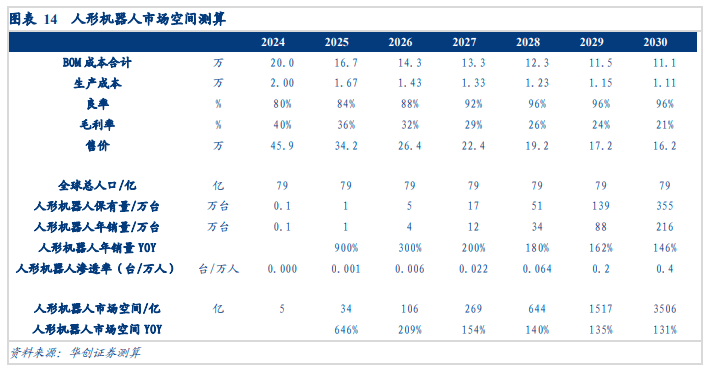
人形机器人市场空间有望在 2030 年超过 3500 亿元。人工智能的快速发展解决了机 器人不智能、没场景两个核心难点,国内产业链的布局有利于快速降本,从而为人 形机器人的普及奠定基础,我们预测 2030 年人形机器人平均售价从 45.9 万降低至 16.2 万,降幅达到 65%;销量达到 216 万台,总市场规模 3506 亿元。

(三)人形机器人相关指数及公司股价复盘
目前人形机器人总共经历了 4 轮周期,每一次振幅逐渐降低。
1) 2022 年 6~8 月,以特斯拉 AI Day 发布人形机器人为催化;
2) 2023 年 5~6 月,以 ChatGPT 为催化,人形机器人是具身智能最佳载体;
3) 2023 年 8 月,以潜在 Tier 1 拓普集团半年报交流为催化。
三、细分行业及相关标的
(一)丝杠
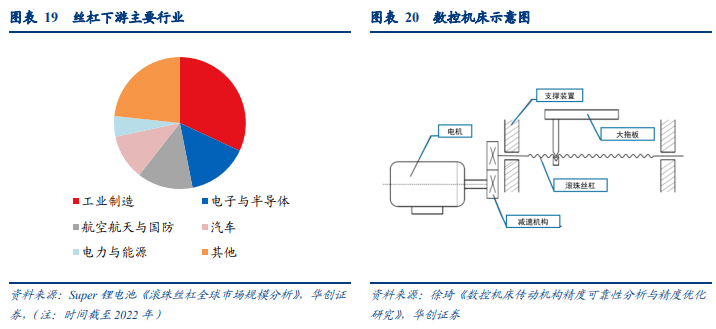
滚珠丝杠是目前应用范围最广的丝杠类型,工业制造业是其最主要的下游行业。从不同行业的市场份额来看,应用于工业制造业的全球滚珠丝杠市场规模最大,占比为 32%。电子与半导体行业、航空航天与国防、汽车行业和电力与能源行业的全球滚珠丝杠市场规模分别为 15%、14%、11%、5%。
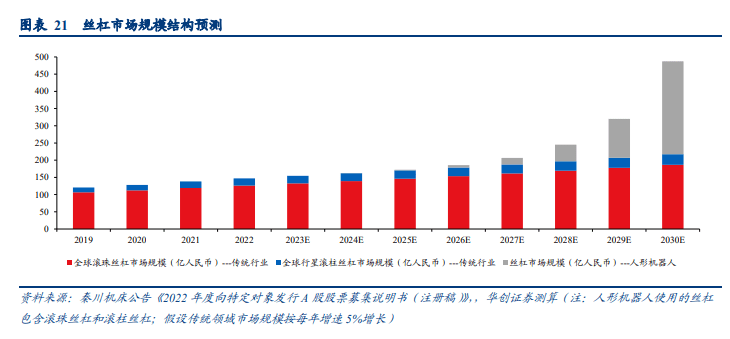
数控机床作为工业制造业中的主要板块,其传动部件多采用滚珠丝杠,传统机床主要采用梯形丝杠,数控机床是在传统机床的基础上,加入数字化控制系统,其工作流程为: 由电机提供原动力,通过齿轮变速机构完成调速,由滚珠丝杠副将电机的旋转运动转化为大拖板上执行元件的往复直线运动,完成机床的进给和加工。由于数控机床对传动工件的精度要求更高,目前多采用滚珠丝杠。
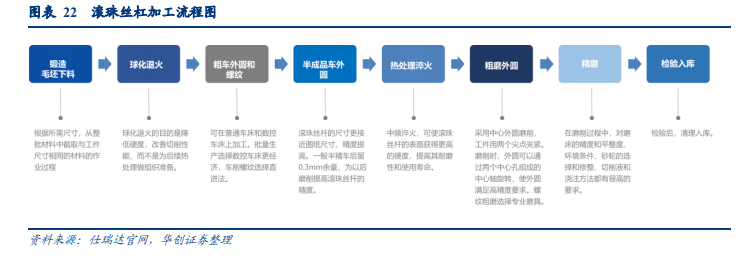
人形机器人量产有望对丝杠出货贡献核心增量。由于人形机器人全身需要实现精密 传动的部位较多,对丝杠的需求较传统的工业机器人及服务型机器人更多,我们预 计在人形机器人进入量产阶段后,将对丝杠需求贡献核心增量,2030 年市场空间或 占全球丝杠市场总规模的 55%。
高精度滚珠丝杠的核心设备是磨床,不同精度的磨床价格差异极大。磨床的工作原 理是砂轮的表面很多磨粒划擦、刻划和切削工件表面,使用螺纹磨床高速旋转的成 型砂轮对加工工件表面进行高速切削,使用磨削加工的滚珠丝杠最高可达到 P1 级。 高精度磨床目前依赖进口,而低精度磨床已经在国内应用广泛。
一旦低精度丝杠成熟应用于人形机器人,国产设备及轴承厂商将迎来机会。目前高 精度的磨床依赖进口,且交付周期很长,而国内精度等级较低的磨床价格便宜交付 周期短,缺点是精度低稳定性较差。而轴承的加工设备与丝杠高度相似,同样依赖 于机床及磨床,产线转换难度低,一旦低精度低成本的丝杠成功应用,则市场的进 入壁垒将极大降低,设备和轴承厂商将成为受益者。

(二)减速器
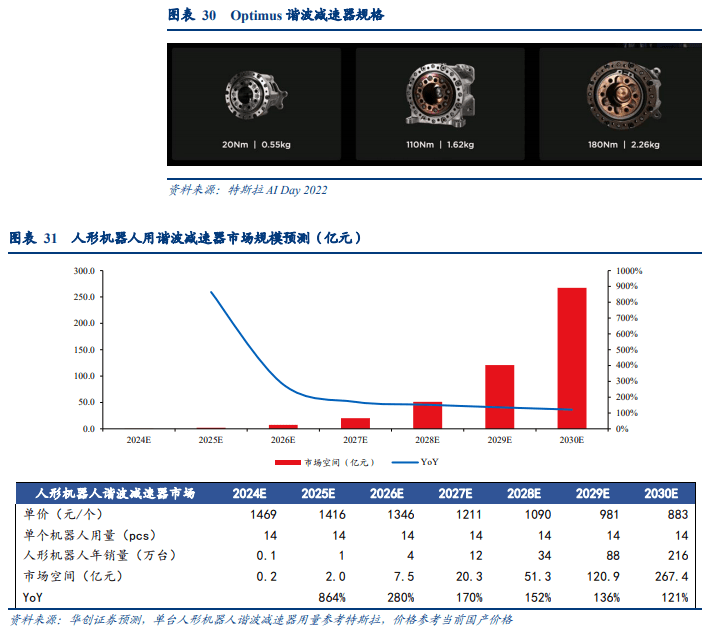
人形机器人的量产将为减速器开辟百亿级新市场。特斯拉 Optimus 躯干共有 28 个关 节执行器,其中旋转关节 14 个,包括肩部 6 个、肘部 2 个、腰部 2 个、髋部 4 个。 旋转关节由无框力矩电机+谐波减速器+力矩传感器+双编码器构成,其中谐波减速 器规格为 3 种,分别为 20Nm/110Nm/180Nm。参考该方案,假设 2024 年起人形机器人将实现从 0 到 1 的跨越,且谐波减速器价格随着产量的提升呈逐步下降趋势,预 计 2024-2030 年人形机器人用谐波减速器市场将由 0.2 亿元增长至 267.4 亿元。
报告共计:35页














 4442
4442











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









