






轮式移动机器人轨迹跟踪的MATHLAB程序,运用运动学和动力学模型的双闭环控制,借鉴自抗扰控制技术结合了非线性ESO,跟踪效果良好,控制和抗扰效果较优,可分享控制结构图。
YID:1380648313061491
tbNick_9w978

轮式移动机器人轨迹跟踪的MATHLAB程序,运用运动学和动力学模型的双闭环控制,借鉴自抗扰控制技术结合了非线性ESO,跟踪效果良好,控制和抗扰效果较优,可分享控制结构图。
这段程序主要是一个小车的动力学仿真程序,用于模拟小车在参考轨迹下的运动。下面我将对程序进行详细的分析解释。
首先,在程序的开头使用clear、clc和close all命令来清除工作空间、命令窗口和图形窗口中的内容。这是一种良好的编程习惯,可以确保程序的运行环境是干净的,不会受到之前运行结果的干扰。
接下来,程序定义了一系列参数和变量,用于设置仿真的参数和存储仿真过程中的数据。这些参数包括小车的质量、车宽、驱动轮半径等,还有参考轨迹的振幅和频率,仿真步长,仿真时间等。这些参数和变量的定义使得程序具有了一定的灵活性,可以根据具体的仿真需求进行调整。
然后,程序定义了一些元胞数组,用于存储不同阶段的数据。这些数组包括参考轨迹位姿、真实运动轨迹位姿、参考轨迹一阶导数、虚拟参考轨迹速度、期望速度、真实速度、控制器输出的控制力矩、控制输入、期望速度与真实速度误差、摩擦值、外界扰动值、总扰动、位姿跟踪误差、扰动观测值等。这些变量的定义使得程序能够记录和分析仿真过程中的关键数据,以便对仿真结果进行评估和优化。
接下来,程序给这些变量赋初始值,包括小车的初始位姿和速度,虚拟初始速度,期望初始速度,控制器输出的控制力矩,扰动观测值等。这些初始值的设置是根据实际情况进行调整的,并且可以在程序运行过程中进行修改。这样,程序的初始状态就可以满足仿真需求。
然后,程序进入一个循环,仿真时间从0到给定的仿真时间tf。在每个循环中,程序根据给定的参考轨迹生成圆形参考轨迹,并计算参考轨迹的一阶导数和虚拟参考轨迹速度。这样,程序就能够根据参考轨迹生成具体的运动路径,并计算出运动的速度和加速度。
接下来,程序计算位姿误差,并使用运动学控制器计算期望速度。然后,程序使用非线性ESO(Extended State Observer)估计速度扰动,并使用动力学控制器计算控制力矩。最后,程序根据控制力矩和扰动计算小车的实际速度和位姿,并计算位姿跟踪误差。这些计算过程是根据控制理论和动力学方程进行的,可以实现对小车运动的精确控制。
在每个循环结束时,程序更新时间和循环索引,并继续下一次循环,直到仿真时间达到设定的结束时间tf。这样,程序就能够进行连续的仿真运算,并获得完整的运动轨迹和控制结果。
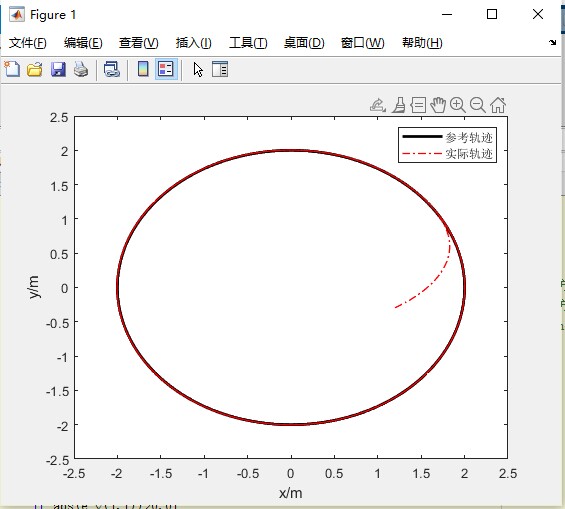
最后,程序绘制了多个图形来展示仿真结果。这些图形包括参考轨迹和实际运动轨迹的图像、参考轨迹角度和实际角度的图像、内环速度误差的图像、位姿跟踪误差的图像、线速度扰动和观测器估计的图像、角速度扰动和观测器估计的图像、速度曲线的图像和控制量输入的图像。这些图形直观地展示了小车在参考轨迹下的运动情况,以及控制器的性能和位姿跟踪误差等。通过这些图形,可以对仿真结果进行全面的分析和评估。
通过以上的分析,我们可以看出,这段程序具有一定的复杂度和实用性。它运用了运动学和动力学模型的双闭环控制方法,借鉴了抗扰控制技术和非线性ESO估计方法,并实现了良好的轨迹跟踪效果和抗扰性能。这个程序可以作为一种通用的移动机器人轨迹跟踪控制方法的实现,对于类似的控制问题具有较高的参考价值。通过分享控制结构图,其他程序员可以更好地理解和应用这个控制方法,从而提升他们自己的控制技术水平。
总之,轮式移动机器人轨迹跟踪的MATHLAB程序是一个具有一定复杂性和实用性的技术实现,它通过运动学和动力学模型的双闭环控制方法实现了良好的轨迹跟踪效果和抗扰性能。这个程序可以为其他程序员提供一个参考,帮助他们理解和应用类似的控制方法,从而提升他们的控制技术水平。
以上相关代码,程序地址:http://wekup.cn/648313061491.html















 176
176











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









