






前言
本博客记录了如何将遥控器的通道映射至PX4的AUX PWM口,从而实现PX4对舵机的控制。
提示:以下是本篇文章正文内容,下面案例可供参考
一、遥控器+接收机配置注意事项
- 遥控器使用的是乐迪AT10,电池为3S,最低显示 3.7 ∗ 3 = 1.1 V 3.7*3=1.1V 3.7∗3=1.1V时,需要充电!
- R9DS接收机
(1)1s内短按2次配对键,切换为蓝色启用S-BUS模式;
(2)打开遥控器,长按配对键,闪烁后,可自动对码;
(3)遥控器的“功能设置”界面,将通道数设置为“10CH”。 - R12DS接收机
(1)打开遥控器,长按配对键,闪烁后,可自动对码;
(2)遥控器的“功能设置”界面,将通道数设置为“12CH”。
二、遥控器通道映射至PX4 PWM口来控制舵机
1.硬件型号:
(1)遥控器:RadioLink AT10
(2)接收机:RadioLink R9DS
(3)飞控硬件:Holybro Pixhawk 6C mini
(4)飞控固件:PX4 1.15.1
(5)舵机:幻尔LDX-218,数字PWM舵机,转动范围为:0~180度
2.设置步骤:
(1)在QGC中将固件、机架、传感器等都设置或者校准完成;
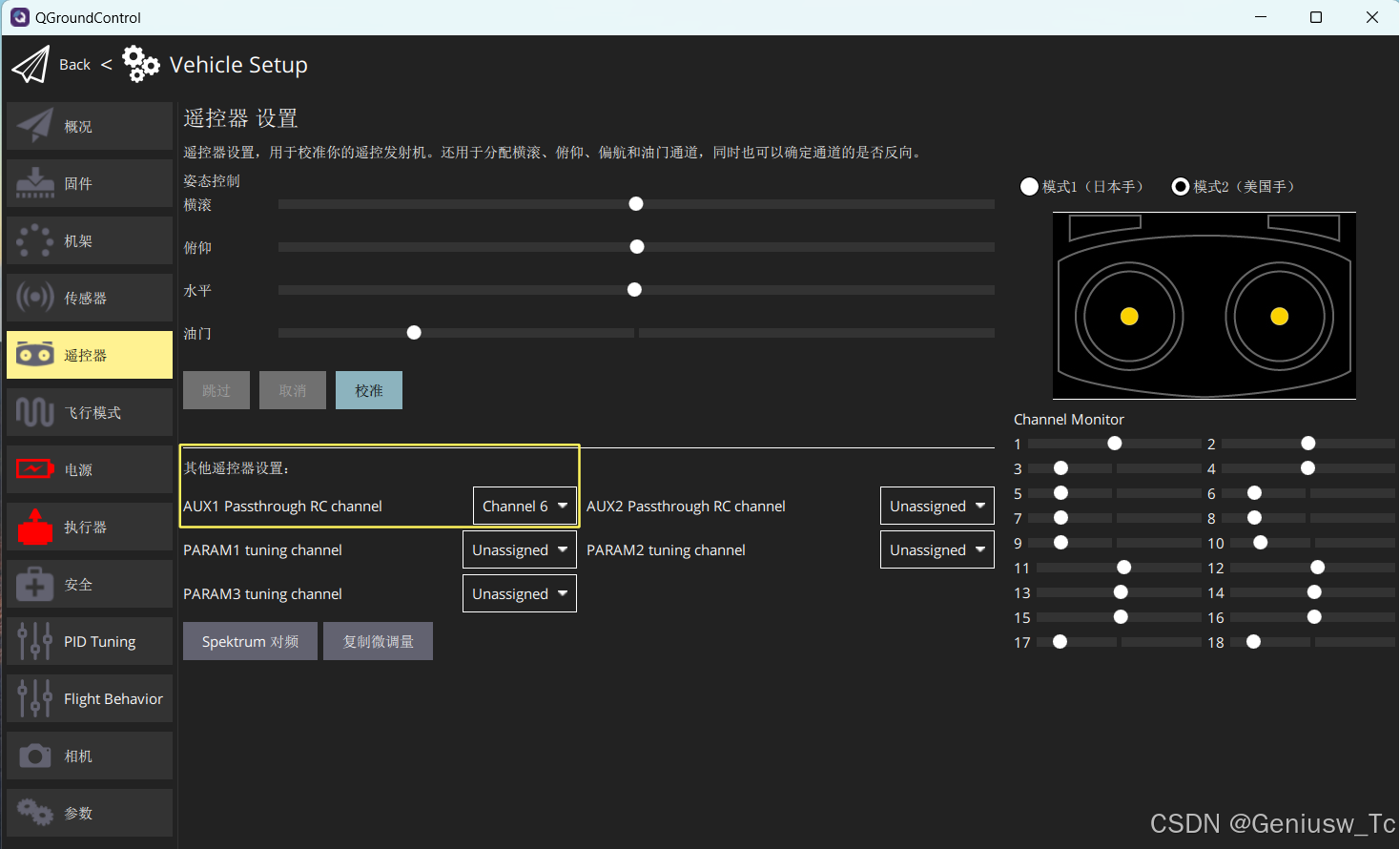
(2)在QGC的“Vehicle Setup”的“遥控器”设置界面,将“AUX1 Passthrough RC channel”的通道进行设置,本人采用的是遥控器的通道6,所以将其选为“Channel 6”。
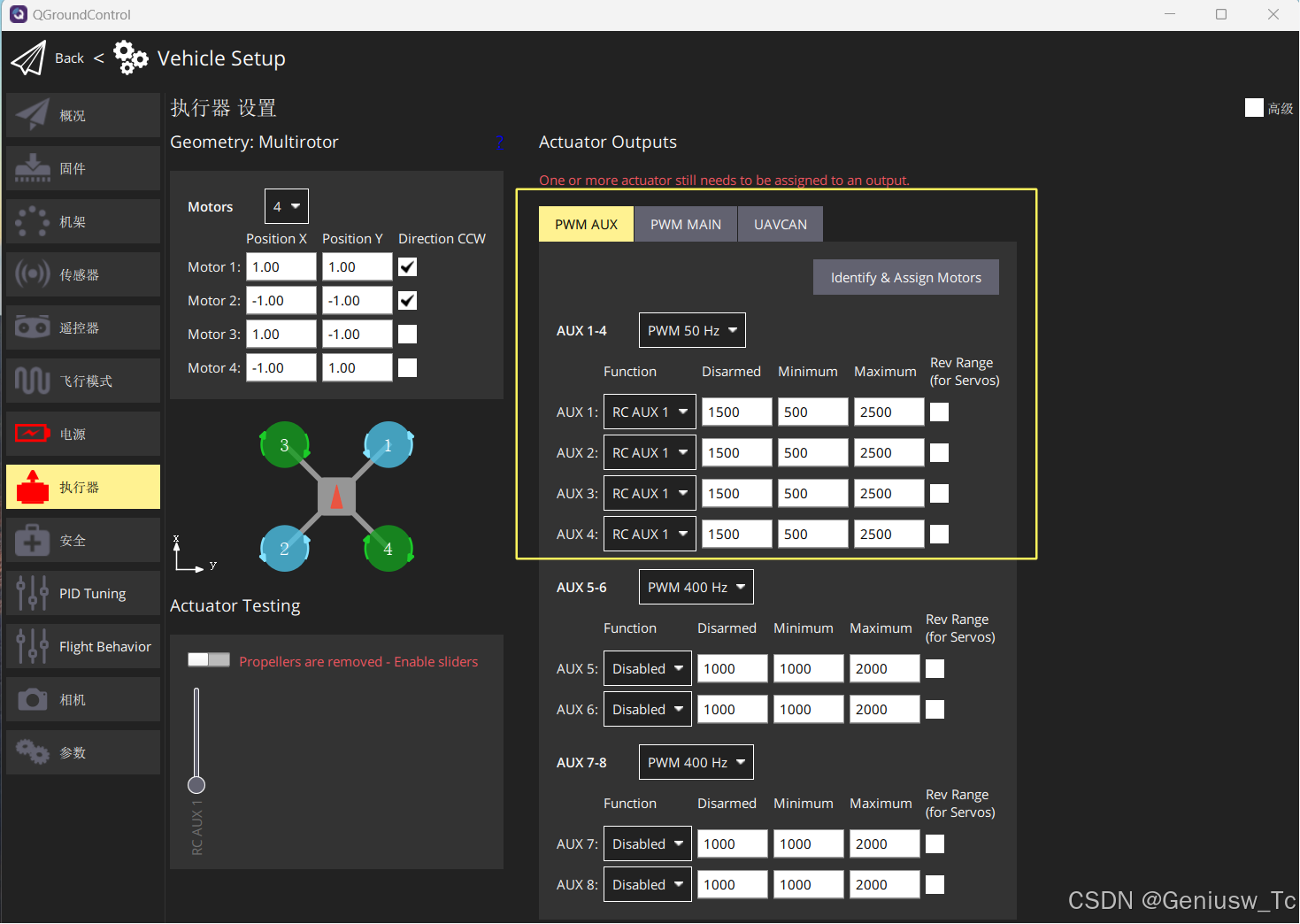
(3)在QGC的“Vehicle Setup”的“执行器”设置界面,选择"PWM AUX"栏,进行如下设置:
-
a. AUX1-4的PWM频率设置为50Hz;
-
b. AUX1-4的Function设置为”RC AUX 1“(本人想控制四个舵机,因此将AUX1-4都通过RC AUX 1来映射);
-c. AUX1-4的Disarmed、Min、Max的脉宽分别填写为:1500,500,2500(填写时可能会报脉宽低于默认的最小值和最大值,点击强制设置即可),这三个脉宽代表舵机的偏转角度,不同的舵机需查询舵机手册确定,一般为 500 500 500~ 2500 μ s 2500 \mu s 2500μs;
-
d. 硬件连接,将舵机的信号线连接至飞控的AUX PWM口,飞控的PWM口电压一般为5V,若舵机需要其他电压供电,可另外添加降压模块;
-
e.可拖动“Actuator Test”中的"RC AUX 1"的圆点来改变脉宽,测试舵机是否能够正常偏转。

-
f. 连接遥控器后,需要将飞控激活至“Armed”的状态,在扭动对应“Channel 6”的拨杆或者旋钮,观看舵机是否会旋转。

-
g.设置完成参数后,可在“参数”栏,选择“工具”,将目前设置好的参数保存为参数文件,以便于之后调用。
总结
本文实现了将遥控器通道映射至PX4 PWM口来控制舵机,下一步将探索如何将控制舵机的代码增加到混控器中,实现对其的自动控制。

















 2870
2870

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









