







最近想做一台遥控水下机器人,使用Pixhawk2.4.8作为主控,参考BlueROV2的设计。其中机械爪部分是难点之一,尤其是对于我这种初学者而言。为了实现机械爪的控制,尝试使用Pixhawk控制舵机转动是第一步。
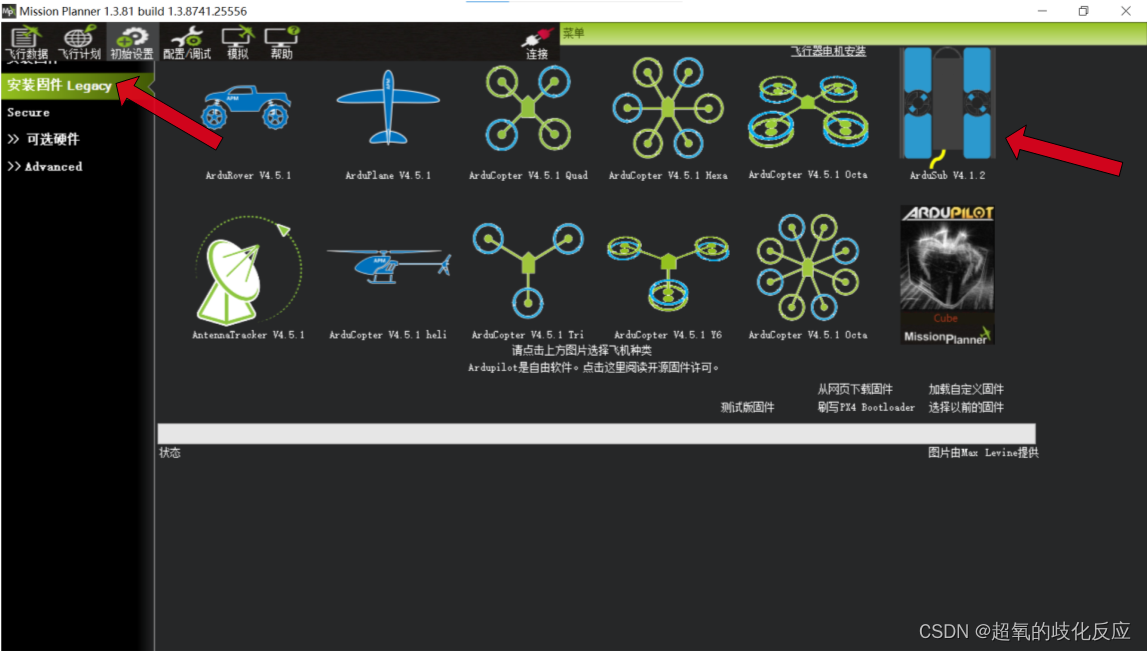
安装固件,这里以ArduSub V4.1.2为例。
进入Mission Planner,将Paxhawk 2.4.8通过数据线连接电脑,
注意:先不要点右上角的连接!
而是进入初始设置->安装固件Legacy->ArduSub V4.1.2,
然后根据操作安装即可。如果要选择飞控版本就选FMUv3,安装完成后,进度条下方会显示“Upload Done”,此时Ardupilot固件就刷写成功了。
接下来选择AUTO进行连接,点
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









