







 超级会员免费看
超级会员免费看
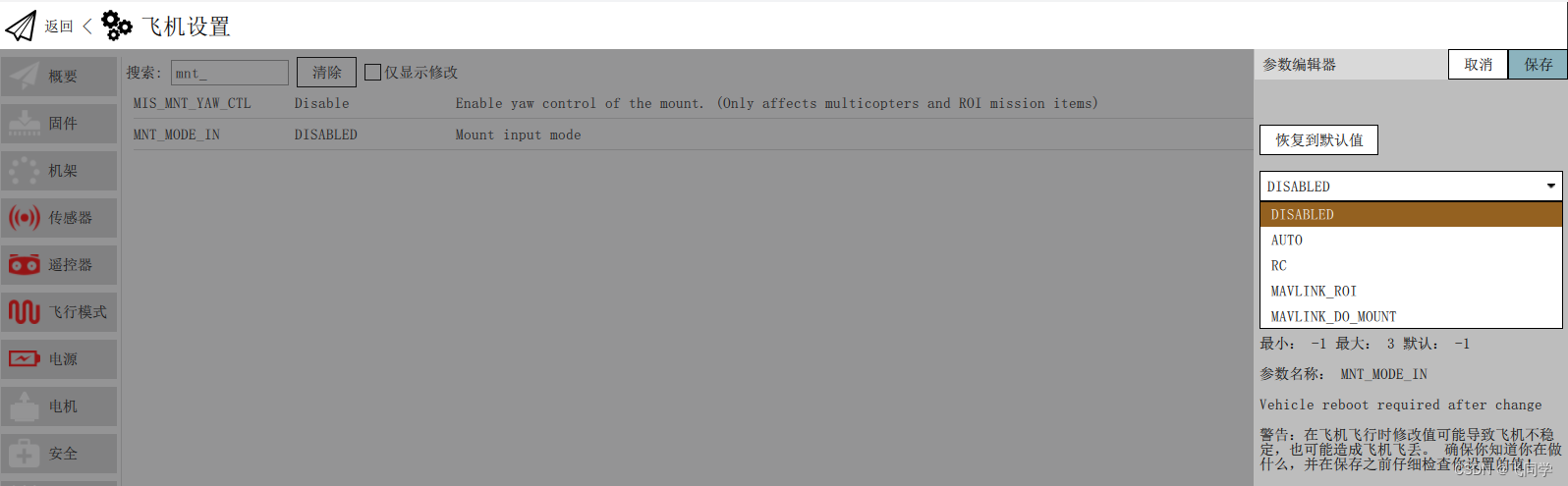
1、配置MNT_MODE_IN参数后重启飞控,释放出mount的设置参数
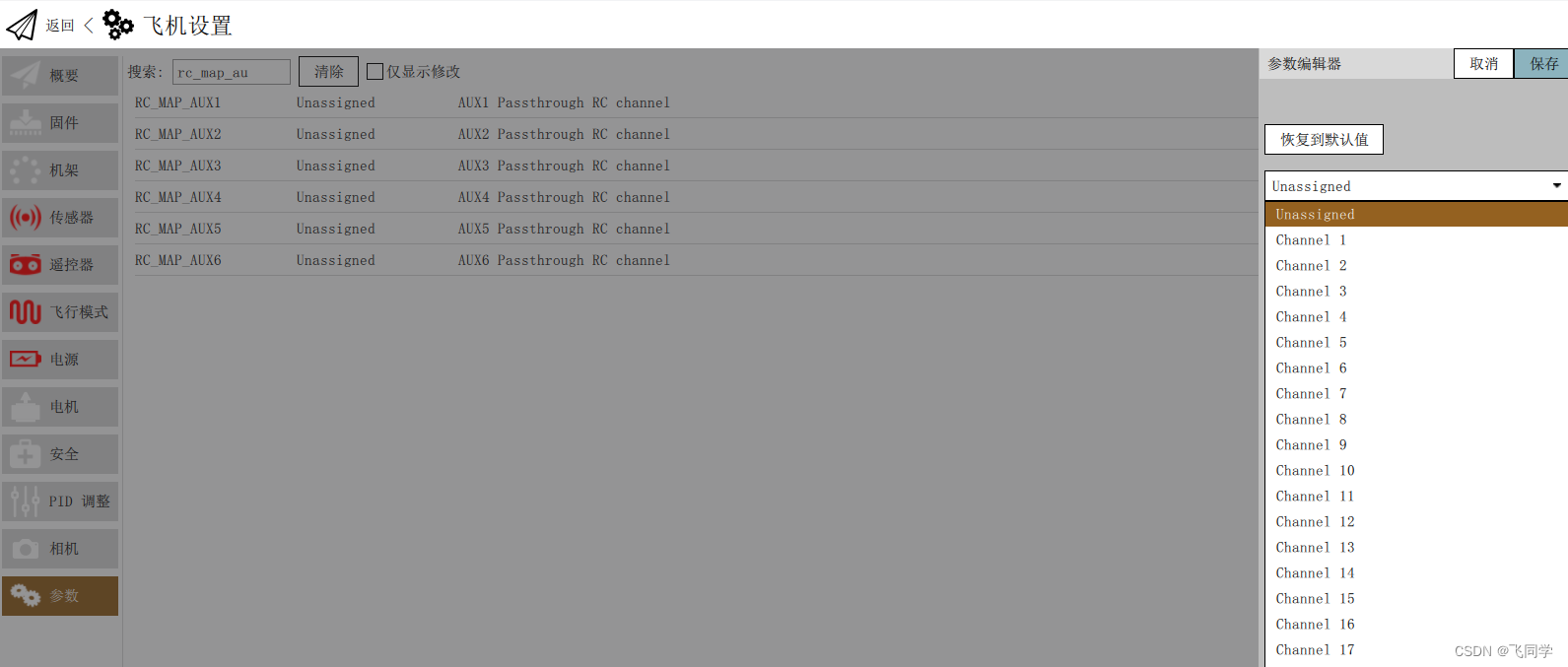
控制信号输入为RC 则接收机必须连接对应的通道至AUX辅助通道,并通过MNT_MAN_*参数设置pitch/roll/yaw对应的AUX通道
(遥控器摇杆 → 接收机通道输出 → 飞控AUX通道输入 → AUX通道输出至云台)
如果参数值为MAVLINK_ROI,则可以通过mavlink命令实现控制;如果参数值为AUTO,则控制方式取决于上一次控制的模式。
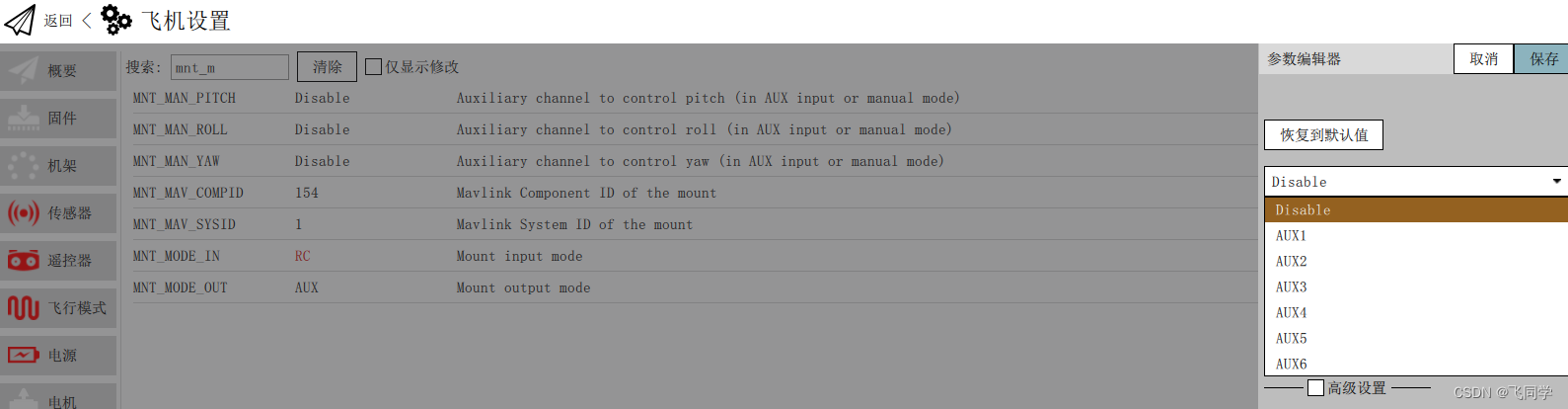
MNT_MODE_IN输入使能后,MNT_MODE_OUT参数设置为AUX后会默认占用AUX端口1-4,此时通过AUX通道1-4输出PWM控制信号至云台,对应的RC通道映射功能失效。MNT_MODE_OUT参数设置为MAVLINK则通过MAVLINK信号控制云台,不影响AUX通道的RC通道映射功能。
PX4云台控制组合方式
1、RC控制输入 → mavlink云台控制输出
2、mavlink云台控制输入 → mavlink云台控制输出
3、RC控制输入 → PWM云台控制输出
配置方法:MNT_MODE_IN配置为AUTO或RC

 订阅专栏 解锁全文
订阅专栏 解锁全文















 877
877











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









