







eletic band(橡皮筋)的定义:连接起始、目标点,并让这个路径可以变形,变形的条件就是将所有约束当做橡皮筋的外力。关于time eletic band的简述:起始点、目标点状态由用户/全局规划器指定,中间插入N个控制橡皮筋形状的控制点(机器人姿态),当然,为了显示轨迹的运动学信息,我们在点与点之间定义运动时间Time,即为Timed-Elastic-Band算法。
一、Timed Elastic Band概述
定义机器人位姿:![]() ,其中
,其中![]() ,
,![]() 和
和![]() 分别对应机器人在map坐标系(或者世界坐标系)的位置和姿态,文章中称其为configuration。
分别对应机器人在map坐标系(或者世界坐标系)的位置和姿态,文章中称其为configuration。
则空间内configuration序列(如figure 1)记录如下:
![]()
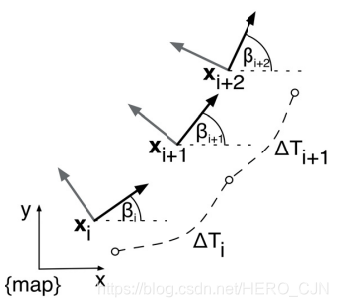
两个configuration间的时间间隔定义为:![]() ,表示机器人由一个configuration运动到另一个configuration所需时间;
,表示机器人由一个configuration运动到另一个configuration所需时间;
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1118
1118

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









