






原创 | 文 BFT机器人
01
背景
本文的背景是点云数据在计算机图形学和计算机视觉领域中的广泛应用。点云是一种表示三维空间中对象的数据结构,由大量的点组成,每个点都有其在三维空间中的坐标和其他属性。
点云数据可以通过激光雷达、摄像头、扫描仪等设备进行采集。在计算机图形学中,点云数据可以用于建模、渲染和动画等方面;在计算机视觉中,点云数据可以用于目标检测、场景分割、姿态估计等方面。
然而,点云数据的不规则性和稀疏性给其处理和分析带来了挑战。因此,本文提出了一种新的神经网络架构,名为Dynamic Graph CNN,用于点云分割任务,旨在捕捉原始输入空间中的语义相似结构,克服点云数据的不规则性和稀疏性。
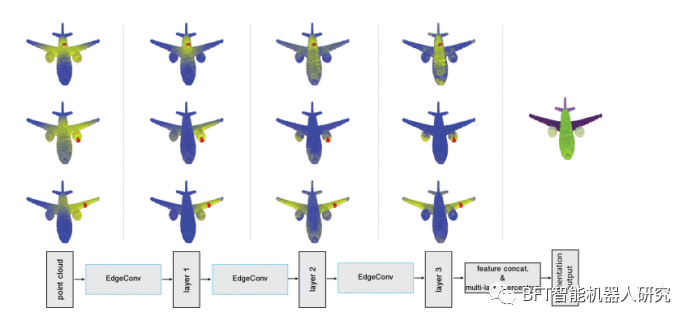
图1展示了使用所提出的神经网络进行点云分割的示例。
02
创新点
本文的创新点主要有两个方面。首先,作者提出了一种全新的神经网络架构,称为Dynamic Graph CNN,专门用于点云分割任务。
与传统的神经网络架构不同,Dynamic Graph CNN 具备处理不规则和稀疏的点云数据的能力,并且能够捕捉点云数据中的语义信息。
这一创新点在解决点云数据分割问题上具有重要意义,因为点云数据的特殊性使得传统的图像处理技术不能直接应用,而Dynamic Graph CNN 可以更好地适应点云数据的特点。
其次,本文还提出了一种全新的特征空间结构,名为EdgeConv,用于在神经网络中高效地处理点云数据。
EdgeConv 能够有效地捕捉点云数据中的局部几何特征,并且可以在不同的层次上进行特征聚合,从而实现更准确的点云分割结果。这一创新为点云数据的处理和分析开辟了新的思路和方法,有助于提高点云分割任务的准确性和效率。
03
算法具体介绍
本文提出的算法是 Dynamic Graph CNN,用于点云分割任务。该算法主要包括以下几个步骤:
1. 输入处理:将点云数据表示为一个点集,每个点包含其在三维空间中的坐标和其他属性。
2. EdgeConv 层:EdgeConv 层是本文提出的一种新的特征空间结构,用于在神经网络中处理点云数据。EdgeConv 层的输入是一个点集和一个邻接矩阵,输出是一个新的点集和一个新的邻接矩阵。在 EdgeConv 层中,首先计算每个点与其邻居点之间的边特征,然后将这些边特征聚合到每个点上,得到每个点的新特征表示。
3. 网络结构:Dynamic Graph CNN 的网络结构由多个 EdgeConv 层和全局池化层组成。在每个 EdgeConv 层中,输入是上一层的输出和一个邻接矩阵,输出是一个新的点集和一个新的邻接矩阵。在全局池化层中,将所有点的特征表示聚合成一个全局描述符,用于生成分类或分割结果。
4. 损失函数:本文使用交叉熵损失函数来训练 Dynamic Graph CNN,用于分类和分割任务。对于分类任务,损失函数是所有样本的分类误差之和;对于分割任务,损失函数是所有点的分割误差之和。
5. 训练过程:使用反向传播算法和随机梯度下降算法对 Dynamic Graph CNN 进行训练。在训练过程中,邻接矩阵是可学习的,因此网络可以自适应地调整邻接矩阵,以更好地适应点云数据的特点。此外,为了防止过拟合,本文还使用了一些正则化技术,如 Dropout 和 L2 正则化。
总之,Dynamic Graph CNN 算法通过 EdgeConv 层和全局池化层的组合,可以有效地处理点云数据,并且能够捕捉到点云数据中的语义信息。该算法在多个点云分割数据集上取得了优异的性能,证明了其在点云数据处理和分析方面的有效性和实用性。
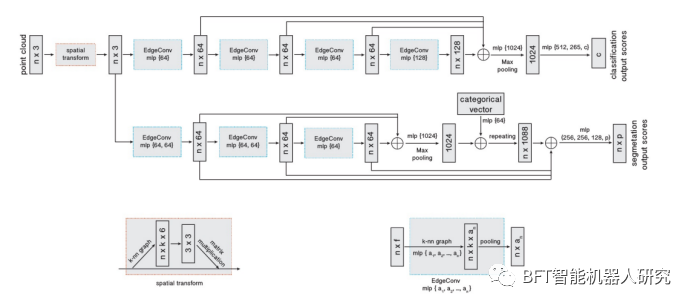
图2描述了用于分类和分割的模型架构
04
总结
本篇论文提出了一种基于EdgeConv层的点云数据分类和分割方法。该方法通过EdgeConv层计算每个点的边特征集,并将这些特征聚合为全局描述符,用于生成点云数据的分类分数。同时,在分割任务中,该方法将全局描述符和每个点的所有EdgeConv层的输出连接起来,从而生成每个点的分割标签。
实验结果表明,该方法在点云数据分类和分割任务中取得了优秀的性能,并且在处理部分数据时表现出较好的鲁棒性。为了进一步探索点云数据的特征空间,本文还提出了一些改进方法,包括使用多尺度特征和局部特征等。这些方法在提高分类和分割的准确性方面发挥了积极作用。
综上所述,本文提出的基于EdgeConv层的点云数据分类和分割方法为这两项任务提供了有效的解决方案。通过捕捉点云数据的边特征和全局描述符,该方法能够在分类任务中准确地进行点云数据分类,并在分割任务中实现精确的点云分割。
这对于点云数据处理领域具有重要的应用价值,为三维场景理解、目标识别和物体分割等任务提供了有力支持。同时,通过进一步探索点云数据特征空间的关系,本文也为未来的研究提供了新的方向和启示。
更多精彩内容请关注公众号:BFT机器人
本文为原创文章,版权归BFT机器人所有,如需转载请与我们联系。若您对该文章内容有任何疑问,请与我们联系,将及时回应。















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









