






本文主要是对之前学习Apollo lattice planner的一些总结,可能会有很多不严谨的地方,仅仅写出自己的理解,欢迎讨论。
规划器大体结构

规划器主要分为两部分
- OpenSpacePlanner,主要用于非结构化道路,车辆上主要是泊车等场景,主要用到算法是OBCA家族的优化算法
- OnLanePlanner, 面对行车道这类结构化场景,相比于非结构化场景,主要特点是在参考线上进行规划,且速度较快,有更多的规则限制,同时会面对更多决策方面的问题。主要使用的有两个算法,PublicRoadPlanner和LatticePlanner,分别侧重不同的场景。
本文主要是对LatticePlanner进行阅读记录。
该规划器的核心函数位于Apollo/apollo/modules/planning/planner/lattice/lattice_planner.cc中,
Status LatticePlanner::PlanOnReferenceLine(
const TrajectoryPoint& planning_init_point, Frame* frame,
ReferenceLineInfo* reference_line_info)
算法可以简单分以下几个步骤

1. 参考线离散化
从routing获得参考线
格式转换
auto ptr_reference_line =
std::make_shared<std::vector<PathPoint>>(ToDiscretizedReferenceLine(
reference_line_info->reference_line().reference_points()));
2. 计算投影点
计算规划起点在参考线的投影点
// 2. compute the matched point of the init planning point on the reference
// line.
PathPoint matched_point = PathMatcher::MatchToPath(
*ptr_reference_line, planning_init_point.path_point().x(),
planning_init_point.path_point().y());
3. 建立frenet坐标系
ComputeInitFrenetState(matched_point, planning_init_point, &init_s, &init_d);

4. 计算障碍物ST图
auto ptr_prediction_querier = std::make_shared<PredictionQuerier>(
frame->obstacles(), ptr_reference_line);
// 解析决策,计算障碍物的s-t图
// 4. parse the decision and get the planning target.
// 传入obs,参考线,参考线信息,自车当前点的s值,sl坐标系下规划终点的s值,轨迹的t,自车当前点的l相关值;
// 传入这么多构建一个PathTimeGraph对象,会跟据障碍物类型生成对应的ST图
auto ptr_path_time_graph = std::make_shared<PathTimeGraph>(
ptr_prediction_querier->GetObstacles(), *ptr_reference_line,
reference_line_info, init_s[0],
init_s[0] + FLAGS_speed_lon_decision_horizon, 0.0,//200m
FLAGS_trajectory_time_length, init_d);//8 secondss
障碍物来源:感知
分类:静态 动态
考虑范围:
纵向:200m 横向:车道内
时间:8s
静态障碍物

动态障碍物,需要根据时间查询障碍物的预测位置


5. 生成横纵项轨迹簇
入口
// 5. generate 1d trajectory bundle for longitudinal and lateral respectively.
// 分别生成横纵向轨迹簇
// 构造一个实例化类对象 输入:初始s d 均是向量 s s’ s'' 障碍物地图
Trajectory1dGenerator trajectory1d_generator(
init_s, init_d, ptr_path_time_graph, ptr_prediction_querier);
std::vector<std::shared_ptr<Curve1d>> lon_trajectory1d_bundle;
std::vector<std::shared_ptr<Curve1d>> lat_trajectory1d_bundle;
// generate lateral and longitude trajectory bundles 轨迹生成
trajectory1d_generator.GenerateTrajectoryBundles(
planning_target, &lon_trajectory1d_bundle, &lat_trajectory1d_bundle);
横纵向解耦 纵向速度规划+横向路径规划
巡航速度
限速段
高精地图
城市道路 15.67m/s
高速道路 29.06m/s
判断有无停车点(高精地图)
纵向速度规划
无障碍物:基于VT进行采样,每个采样时刻进行6次采样,并进行4次多项式拟合
有障碍物:基于ST进行采样,每个采样时刻进行超车和跟车的决策,然后进行5次多项式拟合
有停止点
无障碍物:

有障碍物:

有停止点:

轨迹生成
巡航速度
限速段
高精地图
城市道路 15.67m/s
高速道路 29.06m/s
判断有无停车点(高精地图)
纵向轨迹生成
无障碍物
有障碍物
有停止点
横向轨迹生成(5次多项式)

轨迹生成
横向轨迹生成(OSQP)
二次优化问题
状态量:
x=[l_1,l_2,…,l_60,l_1’,l_2’,…,l_60’,l_1’’,l_2’’,…,l_60’’]^T
优化目标:
J=w_l∑_i=0n−1▒l_i2+w_l’∑_i=0n−1▒l_i’2+w_l’’∑_i=0n−1▒l_i’’2+w_l’’’∑_i=0n−1▒l_i’’’2+w_ref∑_i=0n−1▒(l_i−l_iref)2
约束:
边界约束l_i∈[l_ileft,l_irigℎt]
轨迹生成
横向轨迹生成(OSQP)
轨迹连续性约束

整理

使用OSQP求解器计算出最优的轨迹
对每条纵向轨迹对判断是否可行
速度范围(-0.1,40)m/s
加速度范围(-4.5,4)m/s2
加加速度范围(-4,2)m/s3
计算代价并排序,找到最优轨迹
纵向目标代价
cost_speed=∑_t=0lengtℎ▒t2∙|v_ref−v_evaluate|/∑_t=0lengtℎ▒t2
cost_dist=1/1+dist
cost_obj=w_speed∙cost_speed+w_dist∙cost_dist/w_speed+w_dist
v_evaluate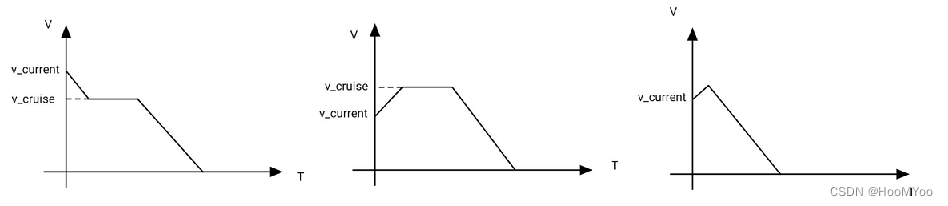
6. 轨迹评估
入口
// 构建一个实例化对象
// 判断是否可行 计算每条横纵向轨迹对的代价并排序
TrajectoryEvaluator trajectory_evaluator(
init_s, planning_target, lon_trajectory1d_bundle, lat_trajectory1d_bundle,
ptr_path_time_graph, ptr_reference_line);
纵向
纵向舒适性代价(jerk)
cost_jerk=∑_t=0lengtℎ▒(jerk/2)2/1+∑_t=0^lengtℎ▒|jerk/2|
纵向碰撞代价
dist={█(obs_low−buffer_yield−s_t s_t<obs_low−buffer_yield@s_t−obs_up−buffer_overtake s_t>obs_up+buffer_overtake )┤
cost=e^−dist^2/2σ^2
cost_collision=∑_t=0lengtℎ▒cost2/∑_t=0^lengtℎ▒cost
向心加速度代价
轨迹评估
纵向
向心加速度代价
a_t=v_t^2∙k_t
cost_centrAcc=∑_t=0lengtℎ▒a_t2/∑_t=0^lengtℎ▒|a_t|
横向
横向偏移代价
cost_LatOffset=∑_s=0s_values▒w_s∙(l_s/3)2/∑_s=0^s_values▒w_s∙|l_s/3| {█(w_s=1 l 同侧@w_s=10 l 异侧)┤
横向舒适性代价
cost_LatComfort=max( l ̈ )=max(l’’∙s ̇^2+l’∙s ̈ )
将横纵向轨迹对与其代价放入优先队列,按cost排序
7. 轨迹融合
double trajectory_pair_cost =
trajectory_evaluator.top_trajectory_pair_cost();//取代价最小的轨迹对的cost
auto trajectory_pair = trajectory_evaluator.next_top_trajectory_pair(); //取代价最小的轨迹
// 轨迹结合
// combine two 1d trajectories to one 2d trajectory
auto combined_trajectory = TrajectoryCombiner::Combine(
*ptr_reference_line, *trajectory_pair.first, *trajectory_pair.second,
planning_init_point.relative_time());
横纵向轨迹融合
有效性检查
8. 碰撞检测
// 输入:障碍物 初始s 初始d 离散参考线 参考线信息 障碍物ST图
// 只是建立碰撞检测的类,把障碍物环境更新到predicted_bounding_rectangles_中,以备后面的碰撞检测
CollisionChecker collision_checker(frame->obstacles(), init_s[0], init_d[0],
*ptr_reference_line, reference_line_info,
ptr_path_time_graph);
...
// check collision with other obstacles
if (collision_checker.InCollision(combined_trajectory)) {
++collision_failure_count;
continue;
}
对于轨迹上每个轨迹点使用OBB方式建立boundingbox
粗检测:

精确检测:使用分离轴定理,将车体和障碍物都看做矩形,做4次投影,判断是否有交集















 935
935











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









