






四轮独立驱动电动汽车,四轮侧偏刚度估计,四电机模型,carsim输出真实值,ckf估计侧偏刚度,由s函数编写
ID:84300703713666725
我是马上
四轮独立驱动电动汽车是一种使用四个独立驱动电机的汽车,每个电机驱动一个车轮。这种配置可以提供更高的操控性和动力性能,因为每个轮子都可以独立调节扭矩和转速。
在设计四轮独立驱动电动汽车时,一个重要的参数是车辆的侧偏刚度。侧偏刚度是指车辆在转弯时产生侧偏角的能力,是衡量车辆操控性能的重要指标之一。通过估计车辆的侧偏刚度,可以评估车辆在转弯时的性能,并对悬挂系统进行调整以提高车辆的操控性。
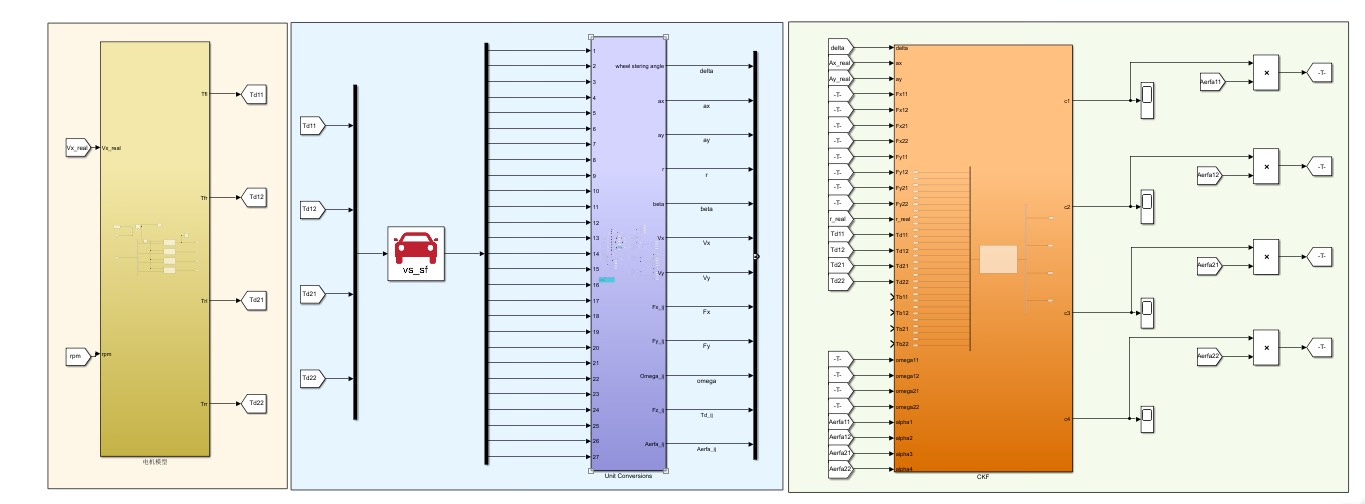
在本文中,我们将介绍一种基于车辆模型和传感器数据的方法来估计四轮独立驱动电动汽车的侧偏刚度。首先,我们需要建立一个车辆模型,包括车辆的动力学特性和悬挂系统的参数。这可以通过使用Carsim等模拟软件来实现,该软件可以模拟车辆在不同情况下的行驶动态。
接下来,我们需要获取真实的车辆数据,以验证我们的模型和估计方法的准确性。可以利用Carsim将车辆连接到实际的硬件系统,以输出真实的数据。这些数据包括车辆的姿态、速度、加速度等信息。
在获得真实数据之后,我们可以使用扩展卡尔曼滤波(CKF)算法来估计车辆的侧偏刚度。CKF算法是一种常用的滤波算法,可以根据系统模型和传感器测量值来估计系统的状态。在本文中,我们将根据车辆模型和Carsim输出的数据,编写一组s函数来实现侧偏刚度的估计。
通过将估计的侧偏刚度与实际测量值进行比较,可以评估我们的估计方法的准确性和可靠性。如果估计结果与测量值相符合,说明我们的方法可以有效地估计四轮独立驱动电动汽车的侧偏刚度。
总之,本文介绍了一种基于四轮独立驱动电动汽车的模型和传感器数据的方法来估计车辆的侧偏刚度。通过使用Carsim输出的真实数据和CKF算法,我们可以对车辆的操控性能进行准确的评估和优化。这种方法可以为汽车制造商和车辆工程师提供有价值的参考和指导,以改善四轮独立驱动电动汽车的操控性能和安全性。
【相关代码,程序地址】:http://fansik.cn/703713666725.html
















 4944
4944

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









