







 文章介绍了SPI通信协议中的四种模式,由时钟极性CPOL和时钟相位CPHA组合而成。CPOL定义了时钟空闲时的电平,CPHA定义了数据在时钟边沿的哪个时刻被采样。通过对这两个参数的不同设置,形成了mode0至mode3的四种工作模式,文中通过图表详细解释了每种模式的特点和采样时机。
文章介绍了SPI通信协议中的四种模式,由时钟极性CPOL和时钟相位CPHA组合而成。CPOL定义了时钟空闲时的电平,CPHA定义了数据在时钟边沿的哪个时刻被采样。通过对这两个参数的不同设置,形成了mode0至mode3的四种工作模式,文中通过图表详细解释了每种模式的特点和采样时机。
0 前言
最近在学习SPI,刚开始接触四种mode的时候,还有点懵,也是搜了好几个博客,才算搞懂,特此记录下,防止下次又要翻好几篇博客才找到答案 >_<
1 四种mode的组成单元
这四种mode是由时钟极性和时钟相位组成,2 bits数据刚好组成4种情况,
-
时钟极性CPOL(Clock POLarity):即SPI空闲时,时钟信号SCLK的电平
- 0:空闲时低电平
- 1:空闲时高电平
-
时钟相位CPHA(Clock PHAse):即SPI在SCLK第几个边沿采样数据
- 0:第一个边沿
- 1:第二个边沿
时钟极性就不多说了,描述的很清楚了
时钟相位中说的第一个边沿和第二边沿是这样理解的,简单画一个clk信号,如下图

从图中可以看到,这个clk有两个边沿,红色的上升沿,和绿色的下降沿
从左往右看去,第一个边沿是上升沿(红色),第二个边沿是下降沿(绿色),所以在这种情况下
-
CPHA = 0,表示在
clk上升沿采样 -
CPHA = 1,表示在
clk下降沿采样
2 四种mode
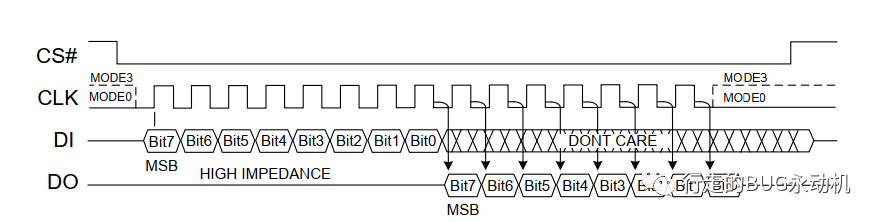
很多介绍spi四种mode时用的都是下面这种图,虽然简洁,但不利于新手理解(别问我是怎么知道的)
列个表给出四种mode
| CPOL | CPHA | |
|---|---|---|
| 0 | 0 | mode 0 |
| 0 | 1 | mode 1 |
| 1 | 0 | mode 2 |
| 1 | 1 | mode 3 |
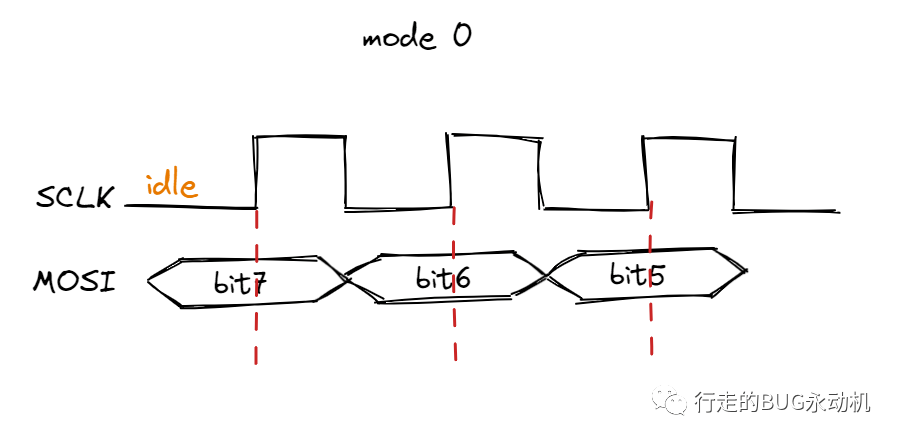
2.1 mode 0
mode 0表示:空闲的时候是低电平,在上升沿采样,如下图所示,在红色虚线处采样
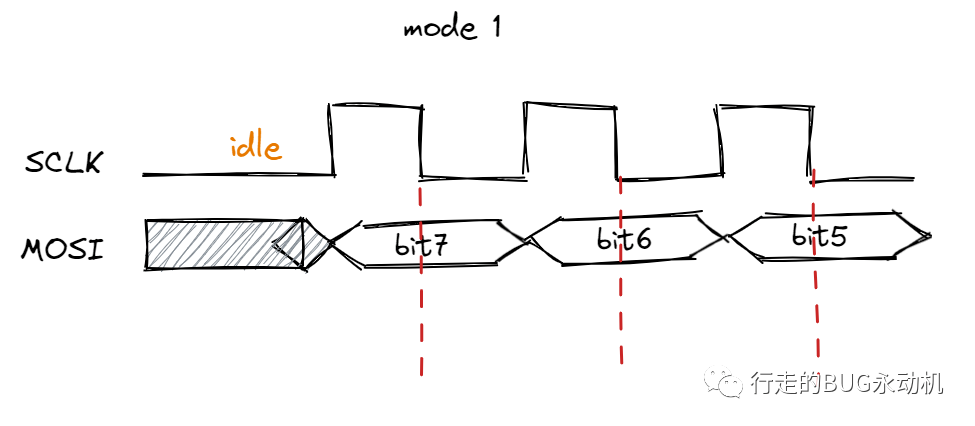
2.2 mode 1
mode 1表示:空闲的时候是低电平,在下降沿采样,如下图所示,在红色虚线处采样
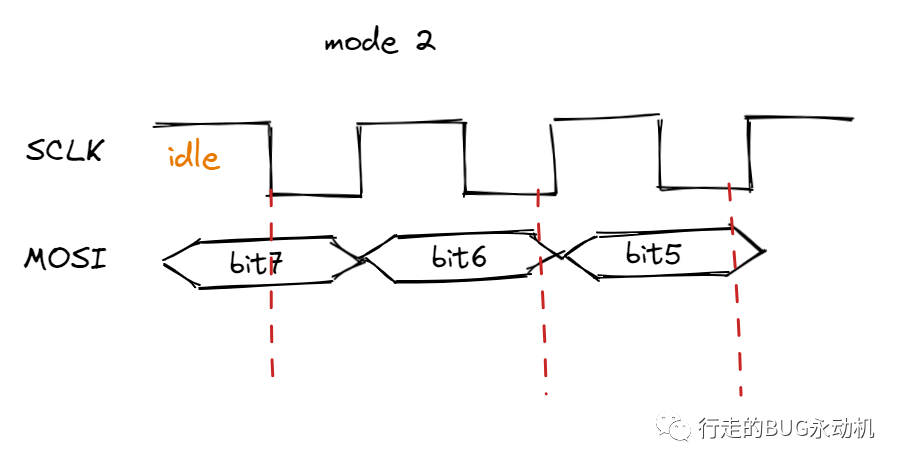
2.3 mode 2
mode 2表示:空闲时是高电平,在下降沿采样,如下图所示,在红色虚线处采样
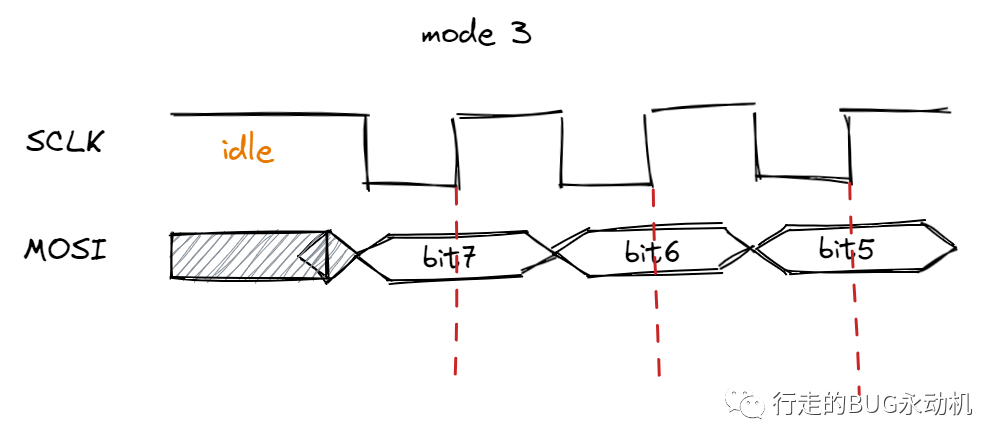
2.4 mode 3
mode 3表示:空闲的时候是高电平,在上升沿采样,如下图所示,在红色虚线处采样

















 584
584

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









