






基于MPC/模型预测控制的轨迹跟随,横向控制模型,车道保持,simulink模型
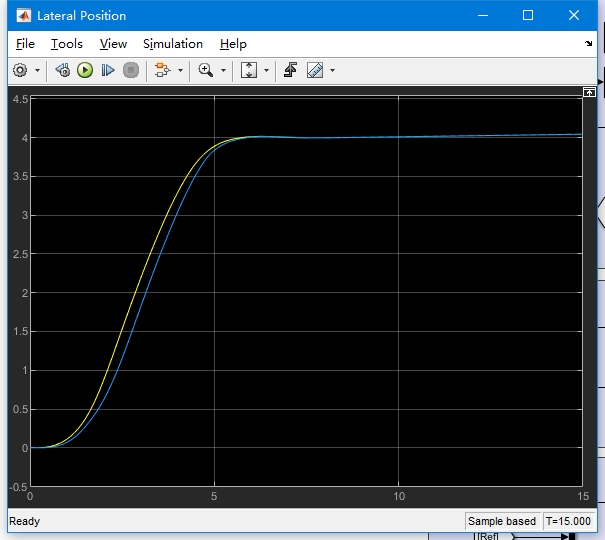
采用二自由度车辆动力学模型,可以自定义车辆参数,自定义目标轨迹,图中为单移线目标轨迹与实际轨迹偏差
ID:4850672075510043
多不多啦米

基于MPC模型预测控制的轨迹跟随,是一种在自动驾驶技术领域中常用的控制方法。本文将以横向控制模型和车道保持为主题,围绕基于MPC模型预测控制的轨迹跟随展开讨论,同时介绍Simulink模型的应用。
在自动驾驶技术中,横向控制是车辆控制中的重要部分,它负责控制车辆的横向运动,使得车辆能够跟随所设定的目标轨迹行驶。而MPC模型预测控制则是一种基于模型的控制方法,它通过对车辆动力学模型进行建模和预测,实现对车辆横向运动的精确控制。
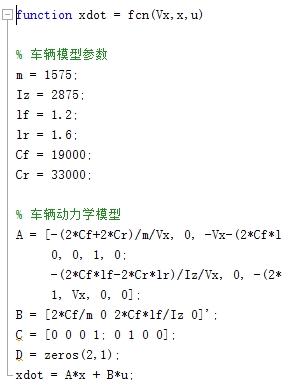
首先,我们采用二自由度车辆动力学模型,这个模型能够较为准确地描述车辆的横向运动。该模型考虑了车辆的横向运动和转向角度,通过对车辆参数进行自定义,可以更好地适应不同类型的车辆。
在基于MPC模型预测控制的轨迹跟随中,我们可以自定义目标轨迹。目标轨迹是指车辆跟随的期望路径,可以根据实际情况进行设置。在图中,我们展示了一条单移线的目标轨迹,与实际轨迹存在一定的偏差。MPC模型预测控制能够根据车辆动力学模型和目标轨迹的差异,实时调整车辆的控制策略,使得车辆能够更精确地跟随目标轨迹。
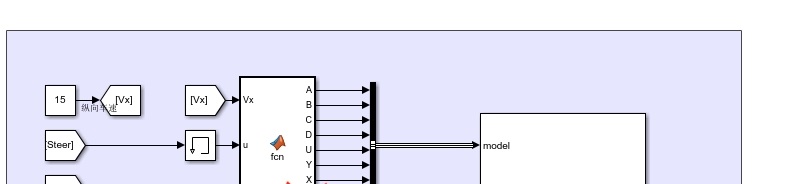
为了实现基于MPC模型预测控制的轨迹跟随,我们可以使用Simulink模型进行仿真和实验。Simulink是一种基于图形化编程的工具,它可以方便地建立和调试控制系统模型。通过在Simulink中建立车辆动力学模型和控制算法,我们可以进行快速的仿真和实验,评估和验证MPC模型预测控制的性能和效果。
总结来说,基于MPC模型预测控制的轨迹跟随是一种精确控制车辆横向运动的方法。通过采用二自由度车辆动力学模型和自定义目标轨迹,结合Simulink模型的仿真和实验,我们可以实现对车辆横向运动的精确控制和轨迹跟随。这种方法在自动驾驶技术中有着广泛的应用前景,能够为提高车辆行驶的安全性和性能提供有力支持。
以上相关代码,程序地址:http://wekup.cn/672075510043.html















 757
757











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









