







方向余弦矩阵 足以设定附体参考系B的取向。但是,矩阵有九个元素,而刚体只能供给三个自由度来设定取向,因为这九个元素不是自变量。欧拉角的三个自变量可以用来设定刚体的取向。
足以设定附体参考系B的取向。但是,矩阵有九个元素,而刚体只能供给三个自由度来设定取向,因为这九个元素不是自变量。欧拉角的三个自变量可以用来设定刚体的取向。
相对于空间参考系S,附体参考系B的取向,可以用三个欧拉角来设定。参阅右图。设定xyz-轴为空间参考系S的坐标轴,XYZ-轴为附体参考系B的坐标轴。称xy-平面与XY-平面的相交为“交点线”,用英文字母(N)代表。按照“zxz顺规”,欧拉角可以这样定义:
 是x-轴与交点线(N)之间的夹角,
是x-轴与交点线(N)之间的夹角, 是z-轴与Z-轴之间的夹角,
是z-轴与Z-轴之间的夹角, 是交点线(N)与X-轴之间的夹角。
是交点线(N)与X-轴之间的夹角。

每一个欧拉角的旋转都对应于一个简单的旋转矩阵:
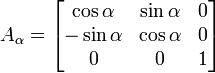 、
、
 、
、
 。
。
设定刚体取向的旋转矩阵是由三个简单旋转矩阵 、
、 、
、 共同合成:
共同合成:
-
 。
。
单独分开工作,每个矩阵各自代表一种旋转。按照顺序相乘,
- 最里面的(最右的)矩阵代表绕着z轴的旋转。
- 最外面的(最左的)矩阵代表绕着Z轴的旋转。
- 在中间的矩阵代表绕着交点线的旋转。
经过一番运算,可以得到矩阵:[2]
-
 。
。
的逆矩阵是:
-
 。
。















 494
494

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









