






在点云相关的研发和生产中,按Pose进行场景漫游是一个十分有用的功能,它可以快速地检查SLAM建图质量或点云编辑效果。用 ros rviz进行点云漫游是一项不错的选择,但它存在的一定的开发门槛,而且需要安装额外的资源。
PCDViewer-5.0.0新增了对点云漫游功能的支持,主要包括两个功能:
1)通过Roam Player播放【1】,Roam Player会显示连续时刻固定大小的局部地图,播放过程中会实时加载点云;
2)按指定pose播放,pose文件会指定相机轨迹及沿途姿态【2】。
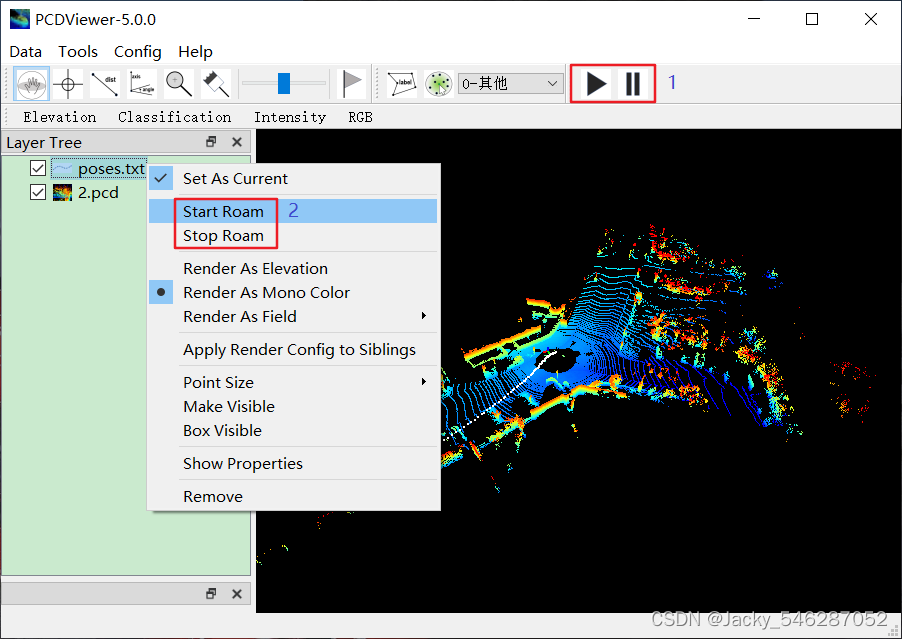
图1 Point Cloud Play相关功能
通过Roam Player播放点云操作如下:
1)点击工具栏播放![]() 按钮;
按钮;
2)在弹出的配置界面(Roam Player Config)中,配置如下参数,包括
- PCD Folder 点云连续帧目录;
- PCD Pose 点云连续帧对应的pose文件;
- Start Frame 起始帧ID,从0开始;
- Local Map Size 局部地图大小;
- View Type 视图类型,包括Car View(车视角)和Map View(地图视角,即俯视图)
播放过程中,可以通过暂停键![]() /继续键
/继续键![]() 或空格按键(Space Key)实现暂停或继续播放。
或空格按键(Space Key)实现暂停或继续播放。
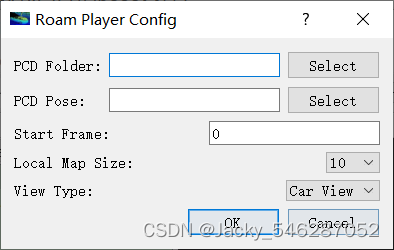
图2 Roam Player Config
按指定pose播放与按Roam Player播放功能类似,同样基于pose文件设置相机位置及视角(姿态),但不会实时加载点云,而是针对已加载的所有点云,并对当前位置及视角下的场景进行可视化。因此,按指定pose播放点云效率更高,但播放的数据量受内存限制。按指定pose播放时,可以通过加号按键(+)/减号按键(-)加快或减慢播放速度。
按pose播放的界面配置如下:
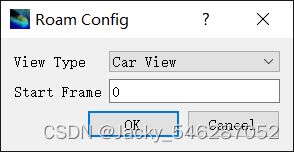
图3 Roam By Pose Config
示例效果
SLAM in Parking
















 312
312











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











