







- 上一文介绍了Dijkstra的基本思路和详细过程
- 接下来介绍一下Dijkstra的改进算法------A*算法
文章目录
栅格地图
-
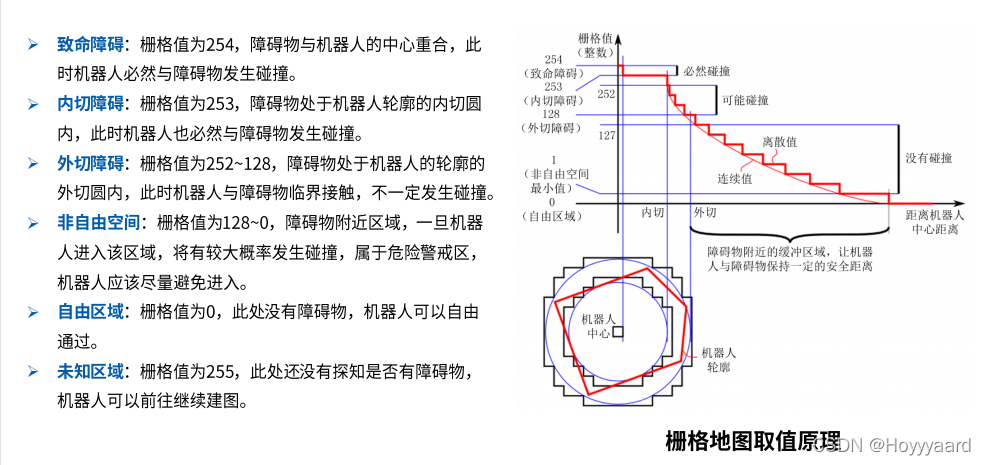
栅格地图取值原理
-
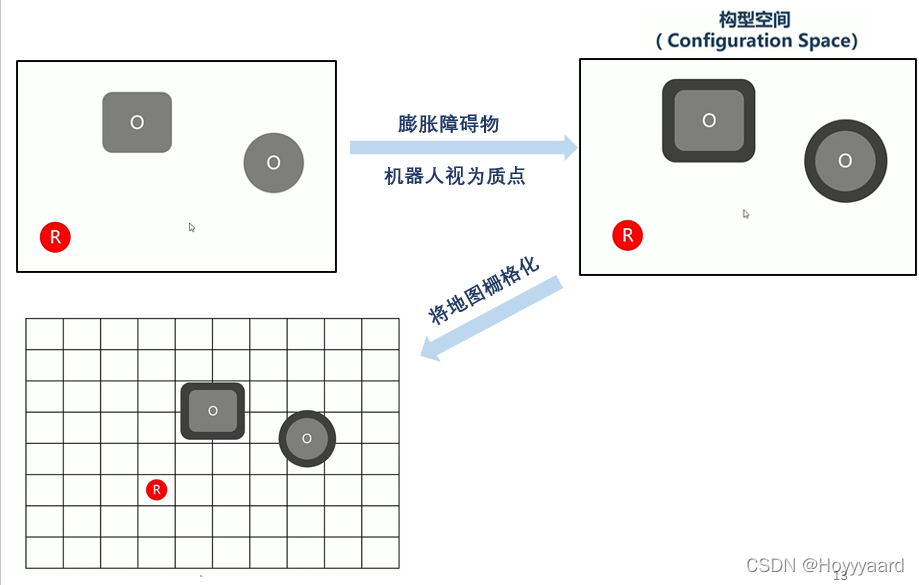
下面是构建一个栅格地图的基本过程
-
膨胀障碍物的意义是构建像上图的非自由区域
-
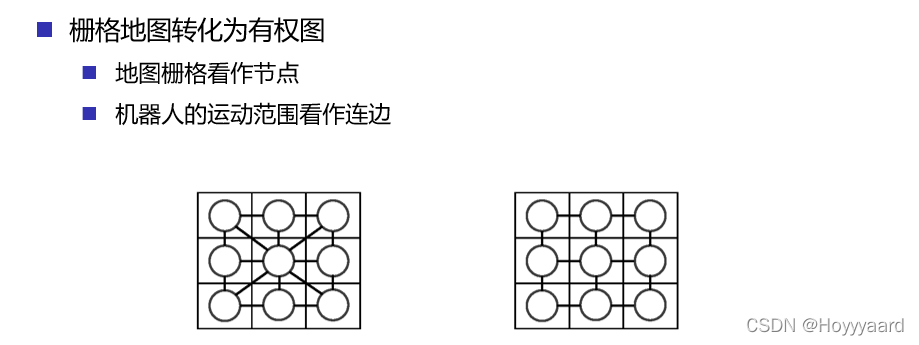
即直线移动的代价g(n)为1 斜边为根号2
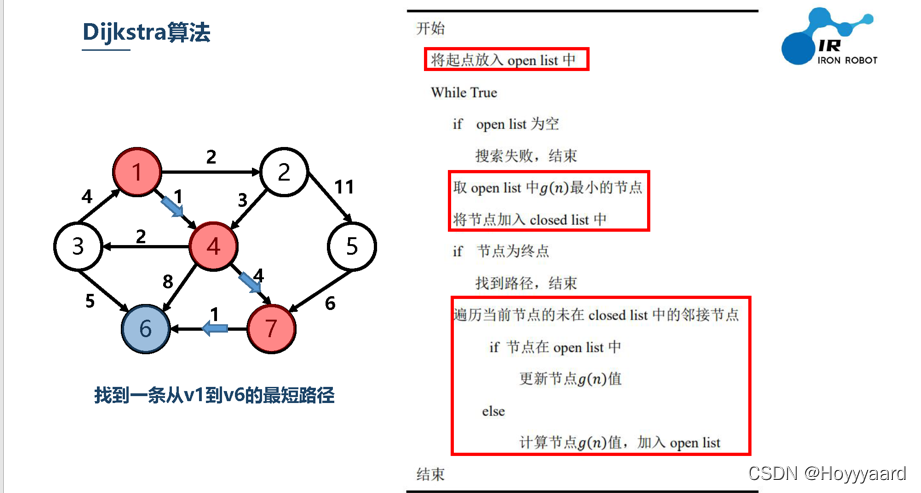
回顾Dijkstra算法
- 下图中的g(n)为节点到节点之间的代价
- eg:节点① 到节点④的代价为 1
- Dijkstra算法仅仅以g(n)为驱动函数
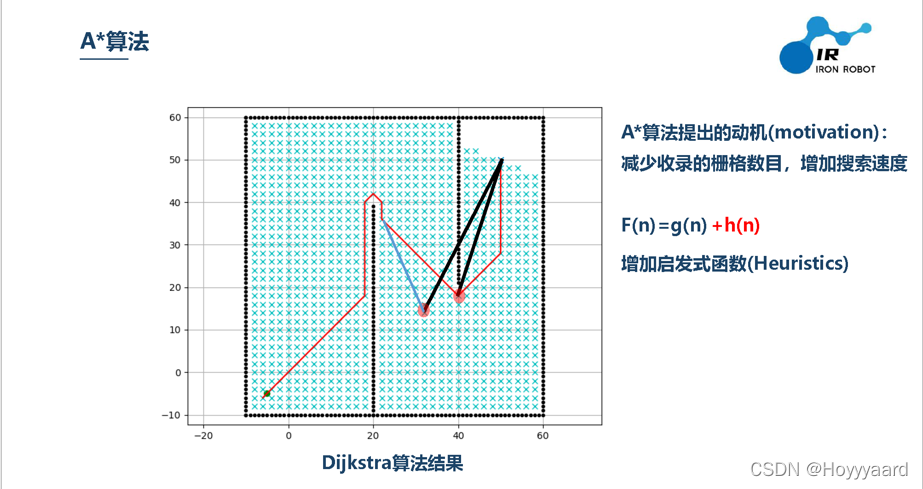
A*算法
A*算法引入h(n)为启发式函数
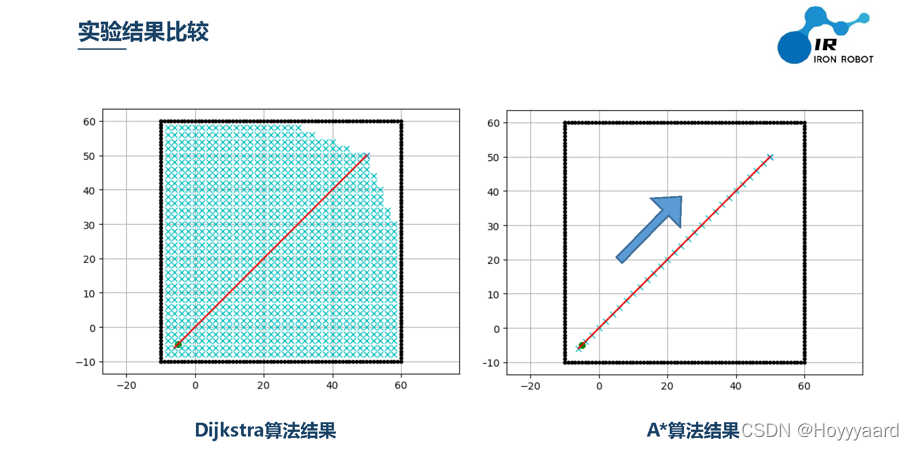
- 下图中为Dijkstra算法的结果 由于栅格地图中每个节点之间的g(n)都 == 1故Dijkstra算法会将收录节点向四周扩散 故结果显示整片地图上很多不相关的节点都会被收录进来 大大增加了工作量
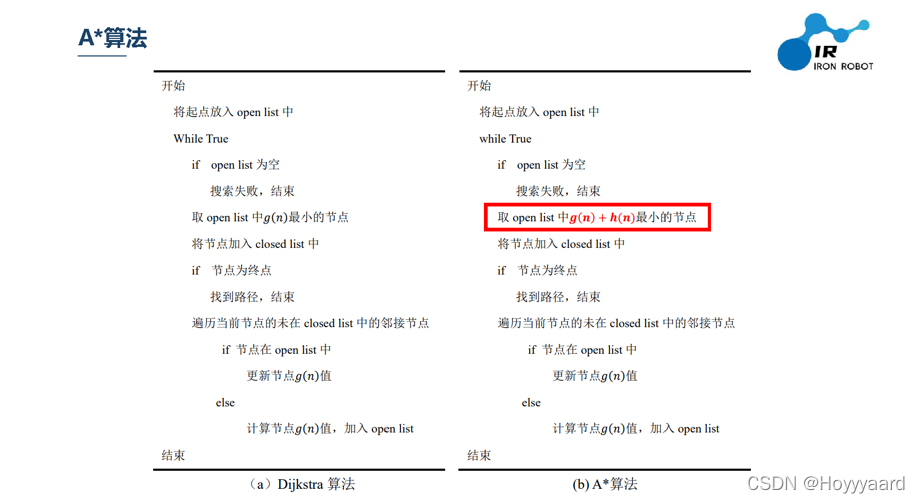
伪代码对比
- 右边引入启发函数减少规划过程中不必要的节点收录
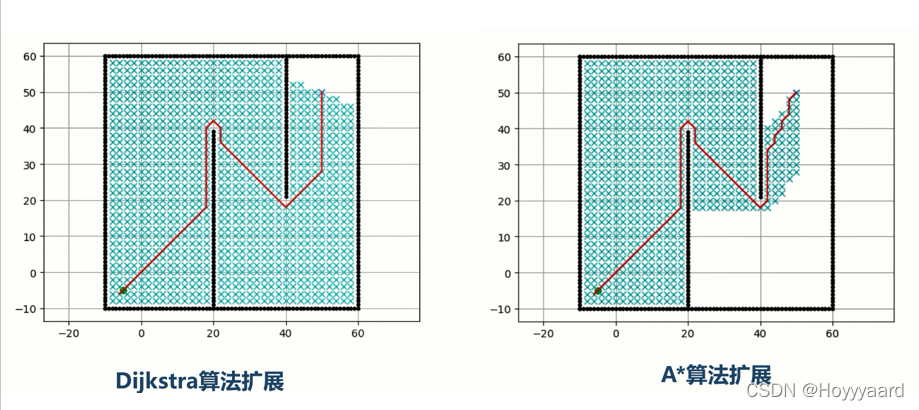
以欧氏距离(即起始点和目标点之间的直线距离)为启发式函数的结果
- 可以看到明显减少了很多不必要的节点的收录
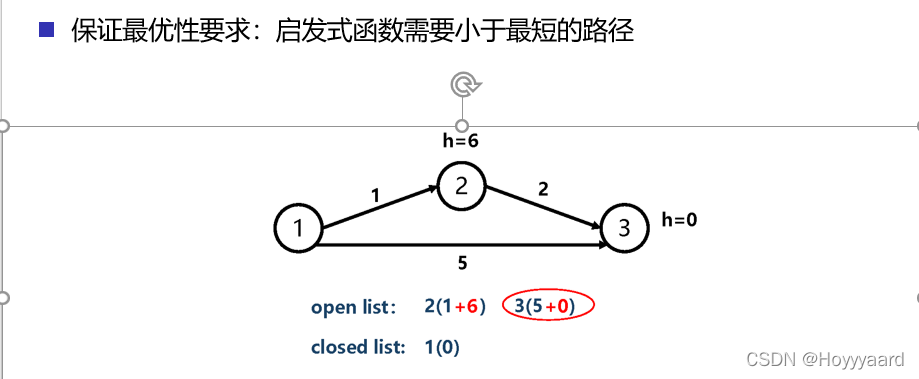
A*算法应用的保证最优化要求
- 启发函数需要小于最短路径
- 下图为一个不正确的例子 假如到达节点②的h(2)= 6 那么算法就会收录③节点(代价为5+0)而不选择实际的最短路径②节点(代价为1+6)
当没有障碍物的时候可以更看出A*算法的优势
- 此时启发式函数h(n)为欧氏距离 故A*算法基本没有收录其他无关节点


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









