






分布式驱动车辆状态估计模型研究
一、引言
随着汽车技术的不断进步,分布式驱动车辆因其独特的动力分配和操控性能,正逐渐成为现代车辆设计的主流方向。为了确保车辆的安全性和稳定性,对车辆状态进行准确的估计是至关重要的。本文将详细探讨基于Carsim和Simulink联合仿真的分布式驱动车辆状态估计模型,重点在于使用级联滑模观测器(ASMO)和UKF SRCKF算法进行状态估计,并解决相关技术难题。
二、分布式驱动车辆轮毂电机模型与PID控制
首先,我们建立分布式驱动车辆的轮毂电机模型。该模型将考虑到电机的工作原理、控制方式和动力传输路径等要素。为了实现对目标速度的准确跟踪,我们使用PID控制器进行闭环控制。PID控制器以其简单有效和响应迅速的特点,广泛应用于各类控制。通过调整PID参数,我们可以实现轮毂电机对目标速度的快速且稳定的跟踪。
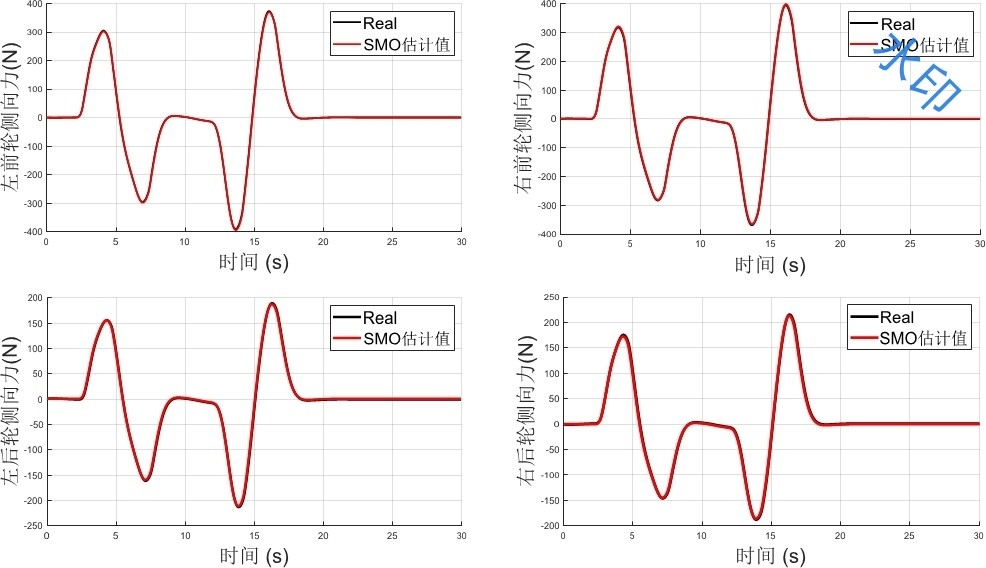
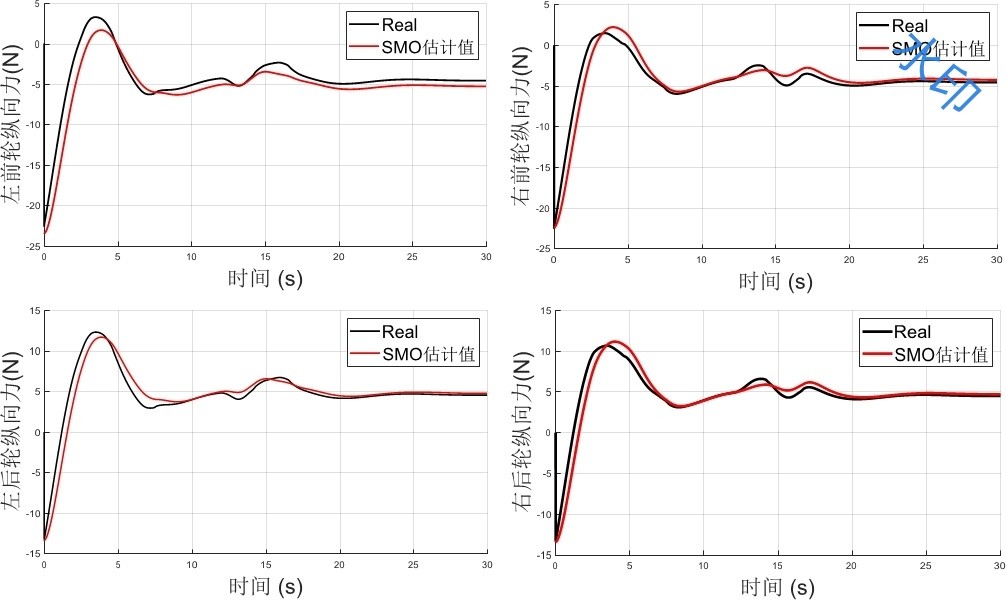
三、级联滑模观测器(ASMO)与轮胎力观测
在车辆状态估计中,轮胎力是一个关键参数。传统的七自由度模型虽然可以用于轮胎力的估计,但存在迭代形式的误差累积问题。为了解决这一问题,我们采用级联滑模观测器(ASMO)进行轮胎力的观测。ASMO能够通过滑模算法,根据车轮运动模型和实时的传感器数据,实现对轮胎力的实时、准确观测。这一方法避免了迭代误差的累积,提高了轮胎力估计的准确性。
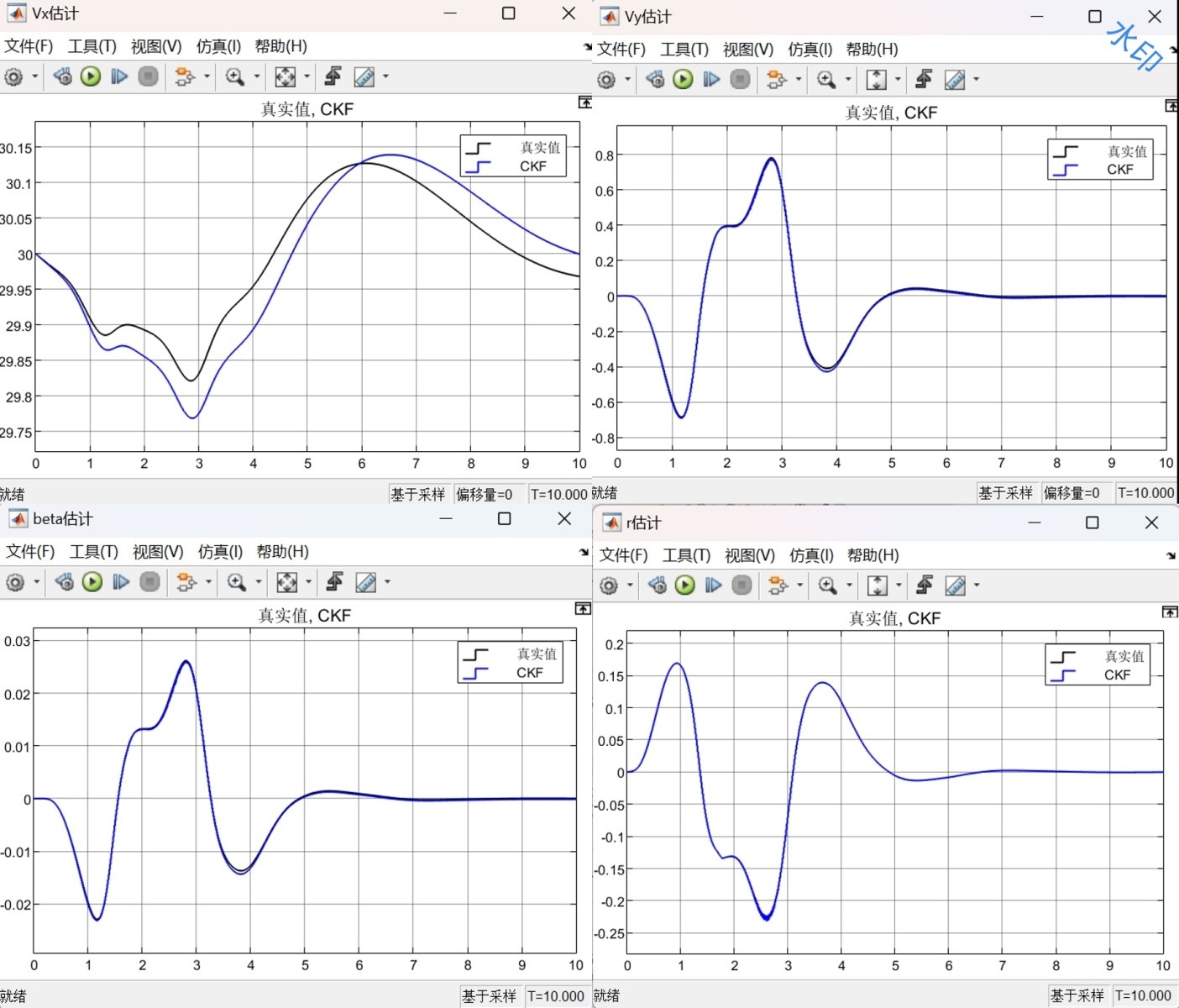
四、UKF SRCKF算法与车辆状态估计
在得到轮胎力观测值的基础上,我们使用UKF SRCKF算法对车辆状态进行估计。该算法结合了无迹卡尔曼滤波(UKF)和球坐标下的Riccati变换卡尔曼滤波(SRCKF)的优点,能够在非线性中实现高效的估计。具体来说,算法会综合考虑车辆的多种运动学参数,如侧向车速、纵向车速、横摆角速度和质心侧偏角等,通过滤波算法实现对这些状态的准确估计。
五、Cholesky分解与Utchol分解法的应用
在车辆状态估计中,算法的鲁棒性尤为重要。Cholesky分解是处理正定矩阵的常用方法,但其在处理非正定或近奇异的矩阵时效果不佳。为此,我们采用Utchol分解法进行优化。该算法能在保持良好的估计效果的同时,增强算法对不同矩阵结构的适应性和鲁棒性。具体应用中,Utchol分解法能有效地解决Cholesky分解只能处理正定矩阵的问题,从而提升整个估计模型的稳定性和准确性。
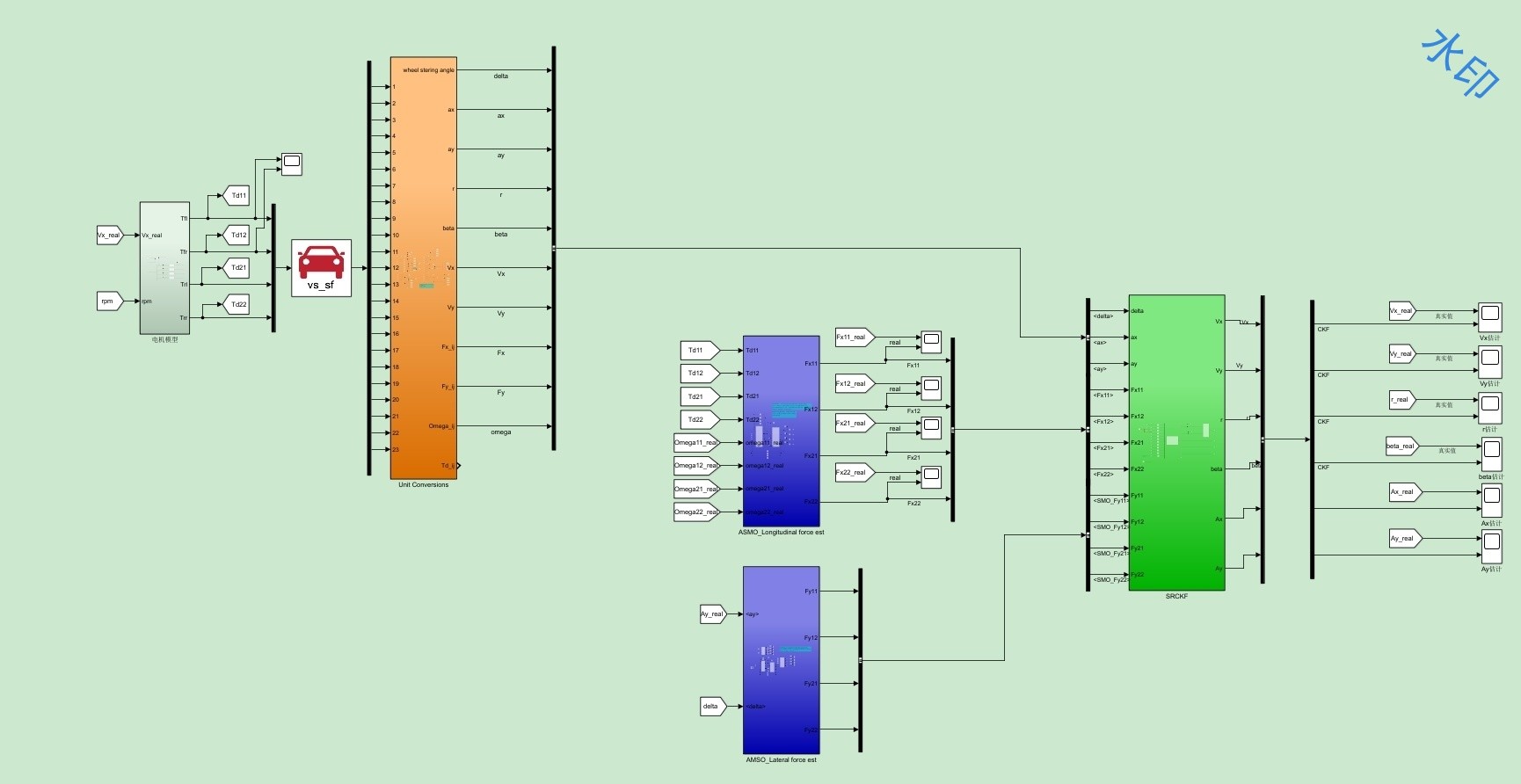
六、Carsim与Simulink联合仿真验证
为了验证上述模型和算法的有效性,我们采用Carsim和Simulink进行联合仿真。Carsim作为车辆动力学仿真,能够提供真实的车辆运动环境;而Simulink则用于搭建和控制我们的状态估计模型。通过对比仿真结果与实际车辆数据,我们可以验证模型的准确性和算法的有效性。
七、结论
本文详细介绍了基于Carsim和Simulink联合仿真的分布式驱动车辆状态估计模型。通过建立轮毂电机模型并使用PID进行速度跟踪,结合级联滑模观测器进行轮胎力观测,以及使用UKF SRCKF算法进行车辆状态估计,我们实现了对分布式驱动车辆状态的准确估计。同时,通过采用Utchol分解法优化算法鲁棒性,进一步提升了模型的稳定性和准确性。这一研究对于提升分布式驱动车辆的安全性和操控性能具有重要意义。
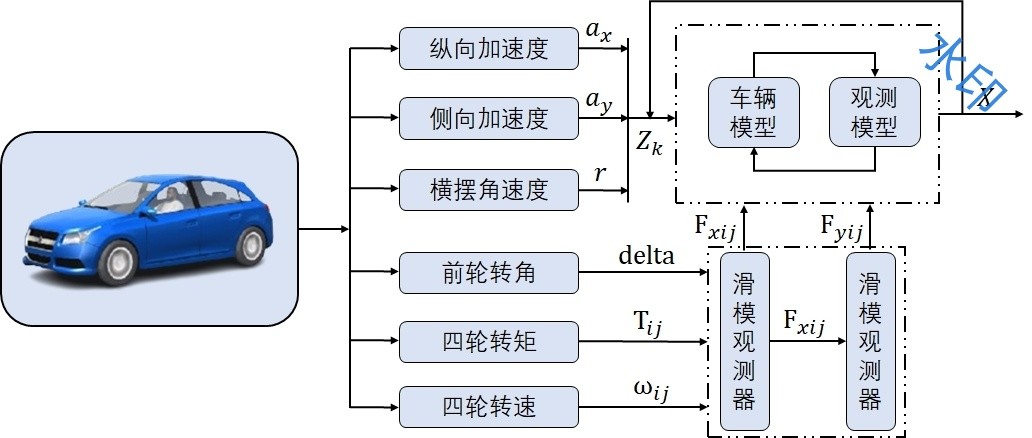
【 分布式驱动车辆状态估计模型】基于Carsim和simulink联合仿真,首先建立分布式驱动车辆轮毂电机模型,并使用pid对目标速度进行跟踪,随后在使用级联滑模观测器(ASMO)和车轮运动模型对轮胎力进行观测的基础上,使用UKF/SRCKF算法对侧向车速,纵向车速,横摆角速度,质心侧偏角进行估计。
不同于基于七自由度模型的状态估计的是使用轮胎力观测器代替建立轮胎模型,防止迭代形式的误差累积(轮胎模型需要估计量作为输入,估计不准轮胎模型的输出相应误差就大);此外为了解决Cholesky分解只能处理正定矩阵的问题,使用Utchol分解法在不影响估计效果的同时提升算法的鲁棒性。


















 118
118

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









