






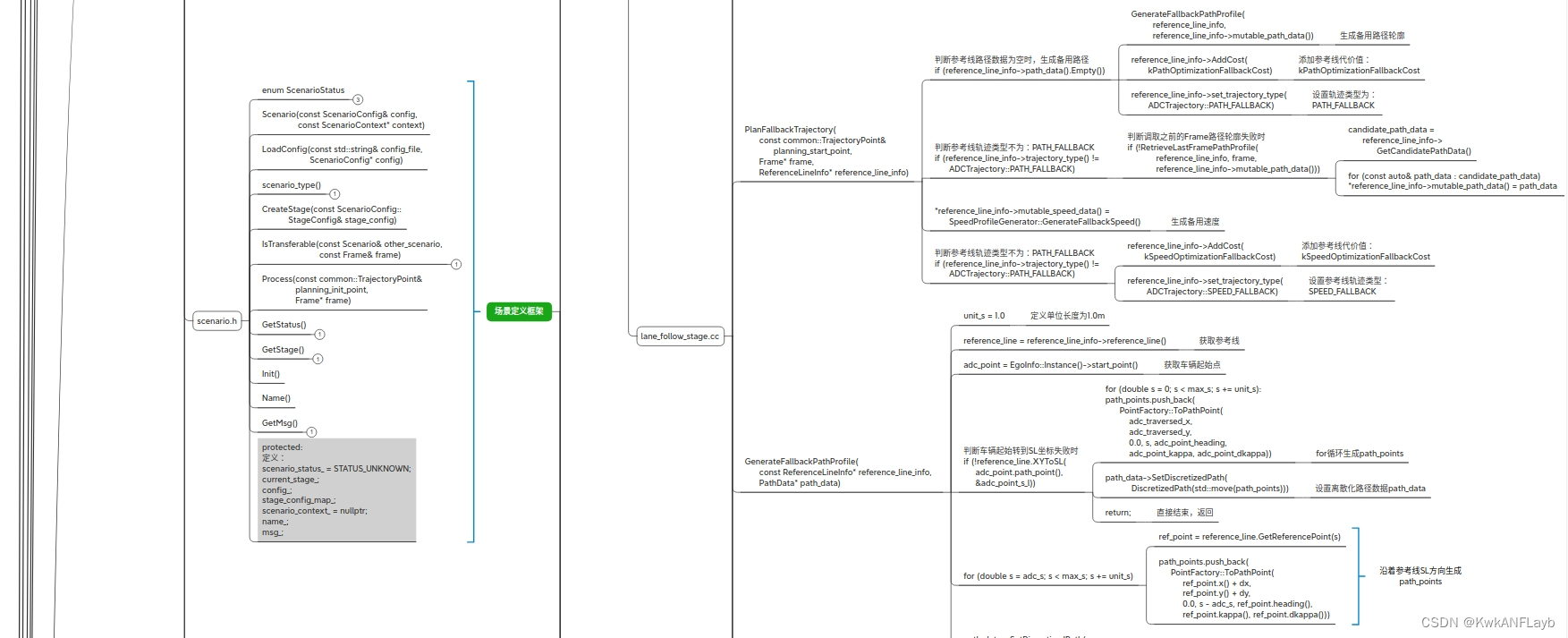
Apollo6.0自动驾驶决策规划模块思维导图 , 这是相较全网来说相对比较细致的决策规划模块思维导图,来自三位决策规划工程师整理一个月的成果。
倘若您在阅读Apollo6.0代码时遇到不能理解的函数或者对整体框架无法清楚地梳理,您可以参考该思维导图。
也可以在该思维导图的基础上增加您自己的注释变成自己的一部分知识储备。
授人以鱼不如授人以渔,路已经指好,相信自己,出发吧

Apollo6.0自动驾驶决策规划模块思维导图是一份相当详细的决策规划模块思维导图,由三位经验丰富的决策规划工程师历时一个月的努力整理而成。在阅读Apollo6.0的代码时,您可能会遇到许多难以理解的函数,或者对整体框架无法清晰地梳理。在这种情况下,该思维导图将成为您的有力工具。该思维导图的详细性使得它不仅可以为初学者提供技术指导,同时也可以为经验丰富的开发人员提供帮助,使他们更好地理解Apollo6.0的决策规划模块。
该思维导图主要包含三部分:场景感知、障碍处理和决策规划。场景感知包括感知数据的分类和处理,例如雷达、相机和激光雷达等传感器的数据。障碍处理包括对感知数据的预处理、跟踪和障碍物过滤。决策规划包括路径规划、速度规划和行为规划。
在场景感知方面,该思维导图提到了多种传感器,包括激光雷达、相机、雷达等。同时,它还详细介绍了每种传感器的作用、数据类型以及相应的处理方法。通过这样的方式,初学者可以更好地理解不同传感器的功能和用途,并且能够更加深入地理解这些传感器在Apollo6.0中的作用。
在障碍处理方面,该思维导图详细介绍了感知数据的预处理、跟踪和障碍物过滤等过程。它详细讨论了这些过程的目的,以及每个过程的步骤和方法。通过这些信息,开发人员可以更好地理解感知数据在Apollo6.0中的处理过程,并且可以利用这些信息来优化代码和提高系统性能。
在决策规划方面,该思维导图详细介绍了路径规划、速度规划和行为规划。它描述了每个过程的目标、步骤和方法,并通过示意图和代码片段演示了它们的实现方式。通过这些信息,开发人员可以更好地理解Apollo6.0中的决策规划模块,并且可以利用这些信息来优化代码和提高系统性能。
总之,该思维导图是一份非常详细的技术指导,尤其适合初学者和有经验的开发人员。该思维导图不仅提供了关键的技术信息,同时它也为开发人员提供了使用Apollo6.0的指导。由于该思维导图是由专业的决策规划工程师编写的,所以它的质量和准确性得到了保证。通过使用该思维导图,开发人员能够更好地理解Apollo6.0的决策规划模块,提高系统性能,并且能够利用这些知识来更好地开发自己的自动驾驶系统。
相关代码,程序地址:http://lanzouw.top/674474063924.html















 563
563











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









