





Finding optimal rotation and translation between corresponding 3D points | Nghia Ho
找到两组对应的3D点数据之间的最佳旋转和平移,以便它们对齐,这是我遇到的常见问题。下面显示了3个对应点(需要解决的最小点)的最简单情况下的问题说明。
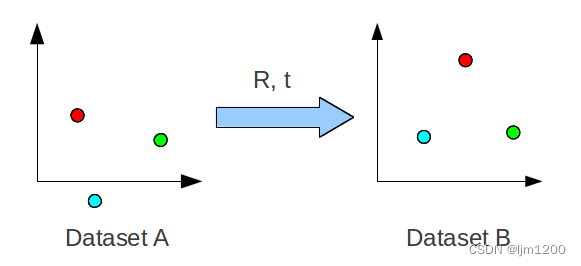
对应的点具有相同的颜色,R是旋转,t是平移。我们希望找到将数据集A中的点与数据集B中的点对齐的最佳旋转和平移。这里,“最优”或“最佳”是指最小二乘误差。这种变换有时称为欧几里得变换或刚性变换,因为它保留了形状和大小。这与仿射变换形成对比,仿射变换包括缩放和剪切。
该问题尤其出现在3D点云数据找正等任务中,其中数据是从3D激光扫描仪或流行的Kinect设备等硬件获得的。
解决方案概述
所提出的解决方案将适用于无噪声和有噪声数据。对于唯一解至少需要3个点。
对于无噪声数据,它将解决以下问题:
如果数据有噪声,它将最小化最小二乘误差
其中A和B是具有已知对应性的3D点的集合。R是3×3旋转矩阵,t是平移向量(技术上是矩阵Nx3)。
找到最佳刚性变换矩阵可以分解为以下步骤:
-
1.找到两个数据集的质心
-
2.将两个数据质心设置到原点上,然后找到最佳旋转R
-
3.找到平移t
寻找质心
该方法很简单,质心仅为点的平均值,可计算如下:
的矢量,例如:
寻找最佳旋转
有几种方法可以找到点之间的最佳旋转。我发现最简单的方法是使用奇异值分解(SVD),因为它是一个在许多编程语言(Matlab、Octave、使用LAPACK的C、使用OpenCV的C++等)中广泛可用的函数。SVD就像线性代数中的一根强大的魔杖,可以解决各种数值问题,但不幸的是,我在大学的时候没有教过SVD。我不会详细介绍它是如何工作的,而是如何使用它。您只需要知道SVD将一个矩阵(称为E)分解为3个其他矩阵,例如:
如果E是一个方阵,那么U、S和V的大小也是相同的。我们只对这个方阵感兴趣,所以我不会详细讨论每个矩阵。
为了找到最佳旋转,我们首先重新调整两个数据集的中心,使两个质心位于原点,如下所示。
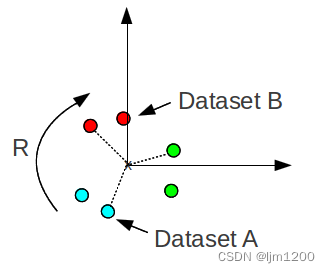
这将去除平移成份,只需要处理旋转。下一步得到一个累积矩阵,一个称为H的矩阵,并使用SVD找到旋转,如下所示:
H是熟悉的协方差矩阵。是一种用中每列减去的运算。
在这一点上,你可能会想,“什么,那么容易?!”,事实上,你是对的。需要注意的一点是,您正确地计算了H。它最终应该是一个3×3矩阵,而不是一个NxN矩阵。请密切注意转置符号。它在两个矩阵之间进行乘法,其中维数分别为3xN和Nx3。乘法的顺序也很重要,如果以另一种方式进行,则会发现从B到A的旋转。
案例的特殊反思
在寻找旋转矩阵时,有一个特殊的情况,需要注意。有时SVD会返回一个反射矩阵,这在数值上是正确的,但在现实生活中实际上是无意义的。这可以通过检查R的行列式(来自上面的SVD)并查看它是否为负(-1)来解决。如果是,则V的第三列乘以-1。
if determinant(R) < 0
[U,S,V] = svd(R)
multiply 3rd column of V by -1
R = V * transpose(U)
end if计算平移t
现在我们已经解出了R,我们可以解出t。将质心代入开头提到的方程中,我们得到:
用法说明
提出的解决方案可以用于任何大小的数据集,只要至少有3个点。当存在多于3个点时,用最小最小二乘法求解。
Code
import numpy as np
# Input: expects 3xN matrix of points
# Returns R,t
# R = 3x3 rotation matrix
# t = 3x1 column vector
def rigid_transform_3D(A, B):
assert A.shape == B.shape
num_rows, num_cols = A.shape
if num_rows != 3:
raise Exception(f"matrix A is not 3xN, it is {num_rows}x{num_cols}")
num_rows, num_cols = B.shape
if num_rows != 3:
raise Exception(f"matrix B is not 3xN, it is {num_rows}x{num_cols}")
# find mean column wise
centroid_A = np.mean(A, axis=1)
centroid_B = np.mean(B, axis=1)
# ensure centroids are 3x1
centroid_A = centroid_A.reshape(-1, 1)
centroid_B = centroid_B.reshape(-1, 1)
# subtract mean
Am = A - centroid_A
Bm = B - centroid_B
H = Am @ np.transpose(Bm)
# sanity check
#if linalg.matrix_rank(H) < 3:
# raise ValueError("rank of H = {}, expecting 3".format(linalg.matrix_rank(H)))
# find rotation
U, S, Vt = np.linalg.svd(H)
R = Vt.T @ U.T
# special reflection case
if np.linalg.det(R) < 0:
print("det(R) < R, reflection detected!, correcting for it ...")
Vt[2,:] *= -1
R = Vt.T @ U.T
t = -R @ centroid_A + centroid_B
return R, 














 2382
2382











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









