






目录
1 指数趋近律
1.1 公式
式中,是指数趋近律,其解为
。
1.2 引理
针对
,不等式方程
,
的解为
1.3 指数趋近律分析如下:
定义函数为
,采用指数趋近律,则可得到
根据 节中的引理,针对不等式方程
,有
,
,解为
可见,指数收敛至零,收敛速度取决于
。指数项
能保证当
较大时,系统状态能以较大的速度趋近于滑动模态。因此,指数趋近律尤其适合解决具有大阶跃的响应控制问题。
1.4 说明
指数趋近中,趋近速度从一较大值逐步减小至零,不仅缩短了趋近时间,而且使运动点到达滑模面时的速度很小。单纯的指数趋近,运动点逼近切换面是一个渐进的过程不能保证有限时间内到达,切换面上也就不存在滑动模态了,所以要增加一个等速趋近项,使当
接近于零时,趋近速度是
而不是零,可以保证有限时间到达。
在指数趋近律中,为了保证快速趋近的同时削弱抖振,应在增大的同时减小
。
2 控制器设计
考虑如下被控对象:
其中,和
为已知且
。
滑模函数为
其中,,满足
条件。
跟踪误差为
其中,为理想位置信号。
则
采用指数趋近律,有
结合以上两个式子,得
基于指数趋近律的滑模控制器为
3 仿真实例
考虑如下被控对象:
其中。
取指令信号,被控对象初始状态为
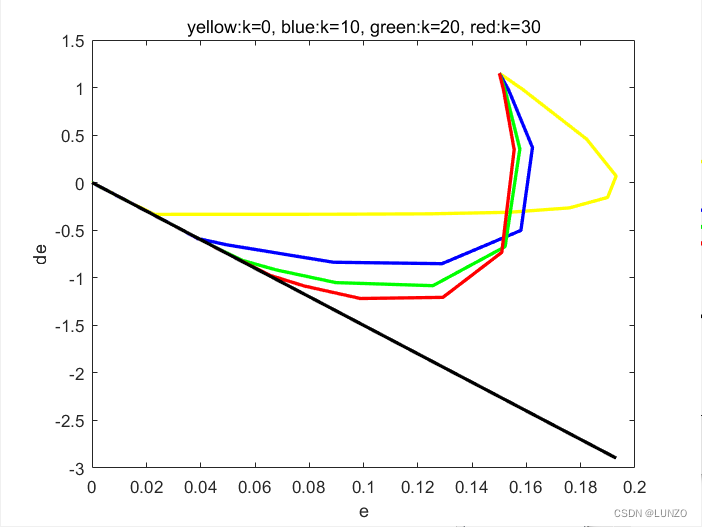
,采用第二章中设计的基于指数趋近律的滑模控制器,取
,分别取
,仿真结果如图所示。可见,当
取值越大时,趋近时间越短。
4 总结
本文主要是对学习滑模控制过程中的记录的笔记,针对滑模控制的抖振现象,设计了一种基于指数趋近律的滑模控制器。
若有侵权,联系必删!
码字不易,若大家觉得还行,后续还会更新,有兴趣的同学可以一起讨论,也欢迎批评指正!
5 参考文献(点击下载相应资源)
滑模变结构控制matlab仿真:基本理论与设计方法/刘金琨著.-3版.-背景:清华大学出版社,2015

















 1610
1610

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









