




一般的滑模控制只考虑能够趋近滑模面即可达性条件,但可达性条件并不能反映出运动是如何趋近滑模面的。
而趋近律法可以较好保证滑模趋近运动阶段的动态品质,合适的趋近律设计可以在远离切换面时,运动点趋向切换面的速度大,以加快系统动态响应;在趋近切换面时,其速度渐进于零,以减弱抖振。
为了改善滑模趋近运动阶段的动态品质与滑模抖振抑制效果,可以采用趋近律方法进行控制。
但不能同时兼顾趋近速度和抖振,增大参数趋近速度快,但抖振增大。
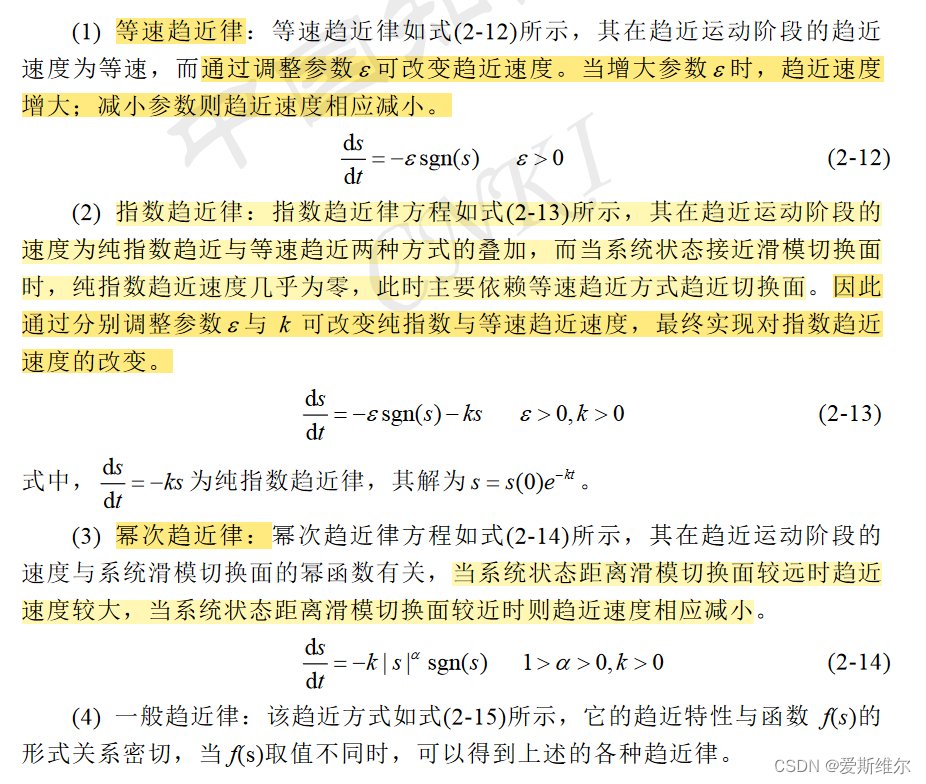
(2)指数趋近律:趋近阶段的速度为纯指数趋近与等速趋近两种方式的叠加。
一般的滑模控制只考虑能够趋近滑模面即可达性条件,但可达性条件并不能反映出运动是如何趋近滑模面的。
而趋近律法可以较好保证滑模趋近运动阶段的动态品质,合适的趋近律设计可以在远离切换面时,运动点趋向切换面的速度大,以加快系统动态响应;在趋近切换面时,其速度渐进于零,以减弱抖振。
为了改善滑模趋近运动阶段的动态品质与滑模抖振抑制效果,可以采用趋近律方法进行控制。
但不能同时兼顾趋近速度和抖振,增大参数趋近速度快,但抖振增大。
(2)指数趋近律:趋近阶段的速度为纯指数趋近与等速趋近两种方式的叠加。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 8323
8323







